
从 MS-Human-700 到肌骨智能体:清华 LNS Group 开源全身人体肌骨模型与仿真环境
清华大学LNSGroup开源了人体肌肉骨骼仿真模型MS-Human-700,包含700个肌肉-肌腱单元和206个关节,可在MuJoCo物理引擎中模拟人体运动。该模型解决了高维肌肉控制难题,并配套开发了DynSyn协同控制、MPC2分层规划、QFlex高效探索等算法,支持复杂动作学习。项目构建了完整的仿真工具链,为运动控制、康复医学和人机交互研究提供数字化实验平台,降低了真实人体实验的成本与风险。相
如果只看外表,人体运动似乎很容易被“骨架点”概括:一个髋关节角度,一个膝关节角度,再加上脚的位置,就能刻画一段步态。但真正让人走起来的,不只是骨架。肌肉受到神经系统的控制发力收缩,关节受到约束,脚掌和地面接触,身体还要在不断扰动中保持平衡。
很多时候,需要研究的恰恰是这些藏在姿态背后的东西:某块肌肉是不是过度发力?外骨骼有没有把不该有的力传给人体?一个假肢结构改变后,身体会不会用新的方式补偿?这些问题很难只靠真实人体实验反复试,因为成本高、风险大,有些变量也不容易直接测量。一个足够完整、能在物理引擎中运行的人体肌骨模型,就像一个可以反复实验的“数字人体”。
肌肉骨骼仿真(musculoskeletal simulation)在物理仿真引擎中建模人体的肌肉、骨骼、关节、接触和控制,从而推进对运动控制、人机交互和具身智能的研究。
清华大学 LNS Group 近期将人体全身肌肉骨骼模型MS-Human-700及其相关强化学习环境开源。在项目主页中,整理了该研究组围绕全身人体肌骨模型展开的一系列工作:从模型构建,到高维控制,再到接触建模和强化学习中的高维探索算法。MS-Human项目在开源模型文件之外,也正在搭建一个持续生长的肌骨智能体研究平台。
项目主页:https://lnsgroup.cc/research/MS-Human
核心论文:Self Model for Embodied Intelligence: Modeling Full-Body Human Musculoskeletal System and Locomotion Control with Hierarchical Low-Dimensional Representation
会议: IEEE International Conference on Robotics and Automation (ICRA) 2024
全身人体肌肉骨骼模型MS-Human-700
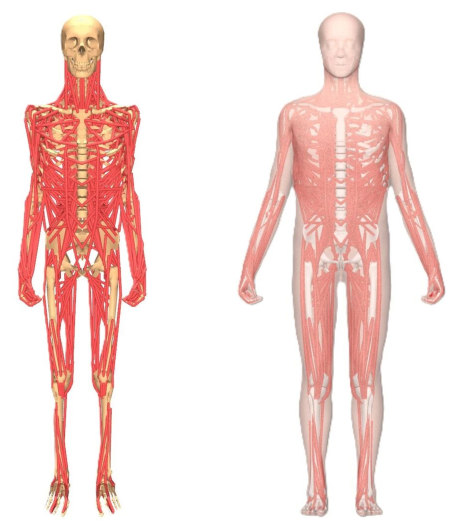
MS-Human-700 模型是项目中仿真的基础。它是一个在MuJoCo 物理引擎中建模的全身人体肌肉骨骼模型,包含躯干和四肢,主要由 90 个身体节段、206 个关节和700 个肌肉-肌腱单元(muscle-tendon units)组成。
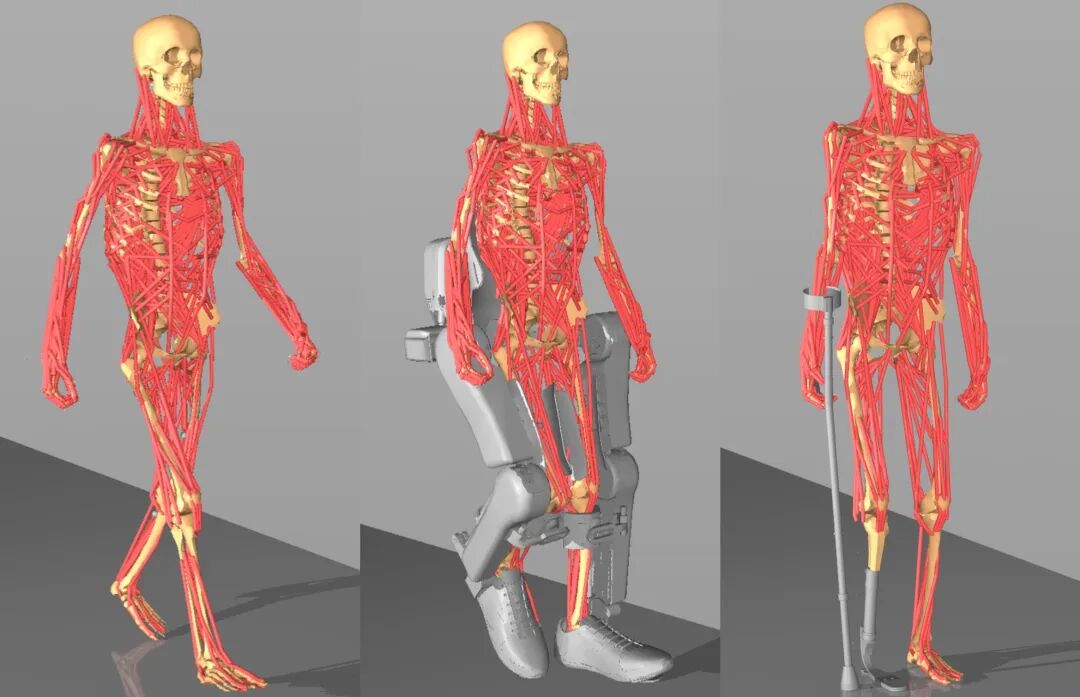
全身人体肌肉骨骼模型可以让研究者在仿真中考虑全身运动,例如:走路时上肢摆动或躯干稳定如何帮助平衡,外骨骼和腿部接触力如何影响步态,假肢替换一部分身体结构后控制策略如何调整,这些问题都需要更完整的身体模型。
从建模方式看,MS-Human-700 将骨骼、关节自由度、肌肉路径和肌肉动力学放进 MuJoCo 物理仿真环境中。对于每个身体节段,都按照文献中的解剖学参数设置了质量、转动惯量等动力学仿真属性。在关节的设计上,使用了旋转关节和滑动关节,并设置了它们的转轴位置、朝向和运动范围,以仿真人体的复杂运动。肌肉采用生物力学领域中常用的Hill-type muscle model,其肌肉力与肌肉长度、速度、激活状态等变量有关,肌肉激活度被每个肌肉-肌腱单元对应的神经信号控制,从而尽可能近似生物体的神经-肌肉动力学。
肌肉骨骼仿真与控制
MS-Human-700的控制难点来自于:700个肌肉驱动器的动作空间维度显著大于人体运动的关节空间,带来了很高的冗余性质。并且,肌肉之间有协同,也有拮抗。人体的动作并不是由几个理想电机直接驱动的,而是由许多块肌肉被神经系统一起协调着收缩或放松,从而牵动骨骼完成的。我们平时看到的人体连贯动作,放到肌肉骨骼模型仿真里,就会变成一个高维、强耦合、高冗余、非线性的动态系统,给优化算法和控制算法带来了很大的困难。
MS-Human project 不只展示模型本身,也把后续围绕这个模型展开的仿真和控制工作放在一起。
高维肌骨系统的强化学习高效训练:DynSyn(Dynamical Synergistic Representation)从动力学结构中学习协同表示,用来控制高维、过驱动系统。DynSyn试图从系统动力学中提取肌肉的协同结构,再用于具体任务控制。
,时长00:20
用MPC减少对高维系统控制的长时间训练: MPC2 (Hierarchical Model-Based Planning)关注高维肌骨系统的模型预测控制(model predictive control)。和纯强化学习不同,MPC2 更强调利用模型进行规划,实现了接近实时的分层 model-based 控制,并且能在模型变化和外部扰动下保持一定适应性。
高维连续控制里的高效探索:QFlex(Scalable Exploration for High-Dimensional Continuous Control via Value-Guided Flow)面向高维连续控制中的探索问题。肌骨模型动作空间大,普通随机探索很容易浪费在无效动作上,甚至让模型直接摔倒。QFlex 使用 value-guided flow,让策略探索更有方向,同时保留原始动作空间的灵活性,可以实现全身跑步、芭蕾等更复杂动作控制结果。
小结
总体来看,MS-Human-700 model把一个全身人体肌骨模型放进了 MuJoCo 和 Gymnasium 的开源工具链中,让模型查看、控制训练、任务复现和后续扩展变得更简单直接。MS-Human Project中的一系列工作在全身肌肉骨骼模型的基础上,提供了一系列控制算法与仿真工具,逐步推进肌肉骨骼模型仿真在运动控制、人机交互、运动康复以及具身智能等方面的研究与应用。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐



 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)