
破局工业深水区:具身智能人形机器人全景架构与实战演进(WORD)
Gemini 说本项目旨在建设“具身智能人形机器人复杂工业场景应用测试场”,攻克感知鲁棒性弱、多机协同难及虚实迁移损耗大等工业落地痛点。通过构建高保真仿真与实物验证结合的测试环境,深度集成多模态大模型以增强自主决策能力,并引入OpenClaw调度系统实现≥50台异构机器人的高并发任务分配与冲突消解。项目核心指标包括:典型场景重建≥100种,推理延迟<50ms,虚实迁移成功率≥90%。该建设将有效填

在工业 4.0 的下半场,人形机器人不再是科幻片中的点缀,而是继智能手机、新能源汽车之后的又一颠覆性终端。然而,当实验室里灵活翻滚的机器人走进光照突变、非结构化、高动态的工业车间时,往往会遭遇“感知失灵”与“动作变形”。
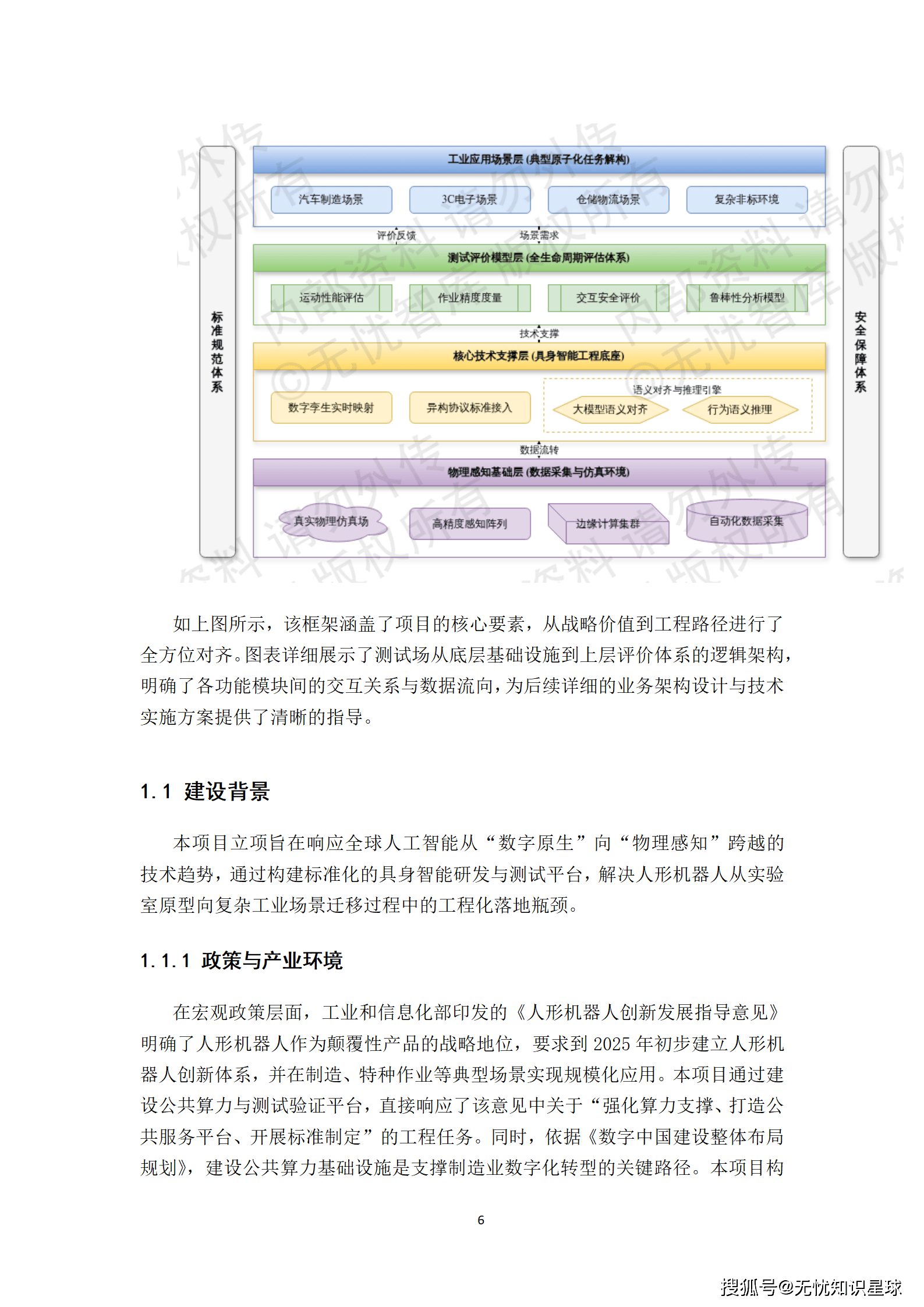
本建设方案的核心价值在于:它不仅构建了一个物理场地,更打造了一套集高保真仿真、多模态大模型训练、多机协同调度于一体的国家级测试基准体系。

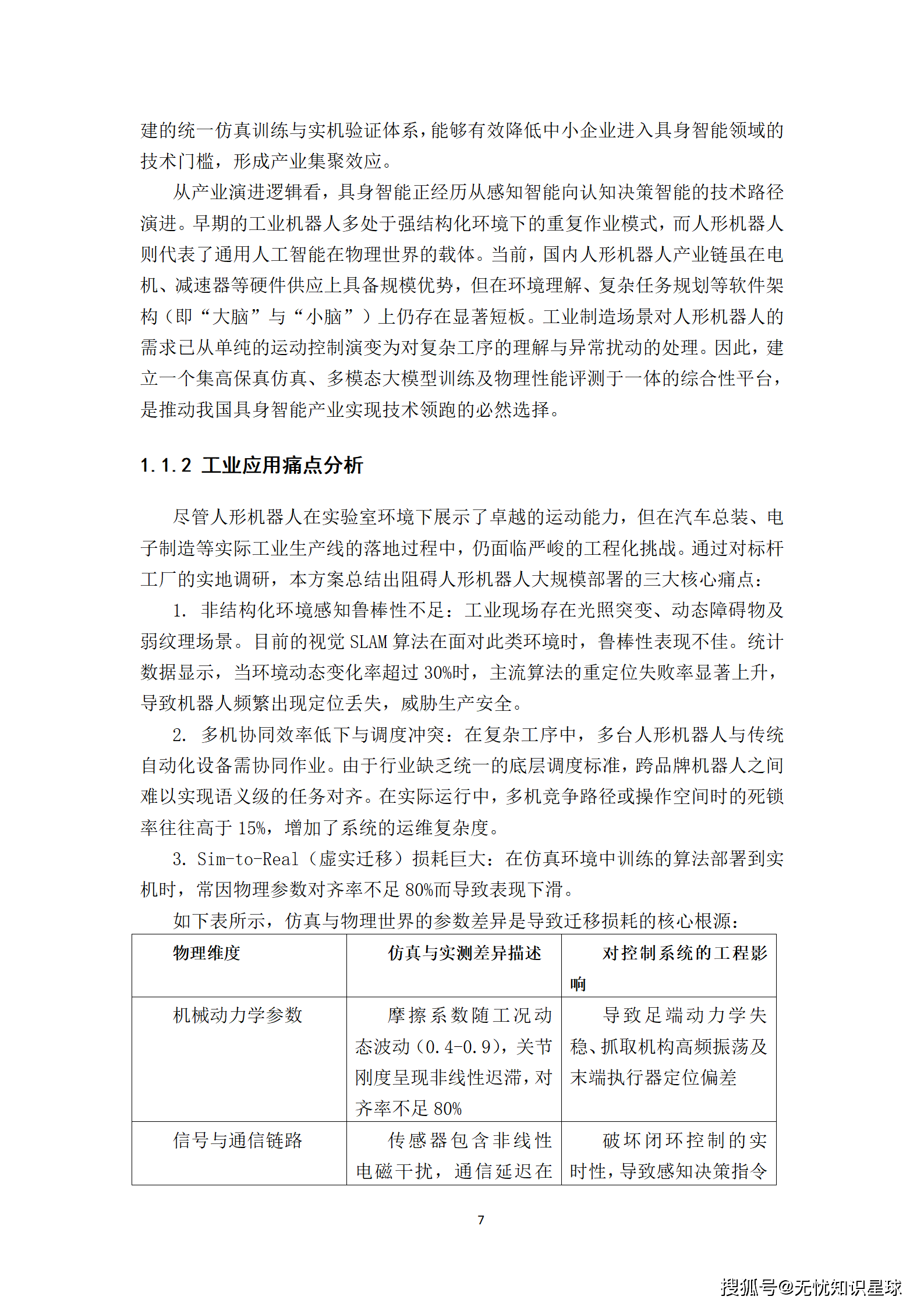
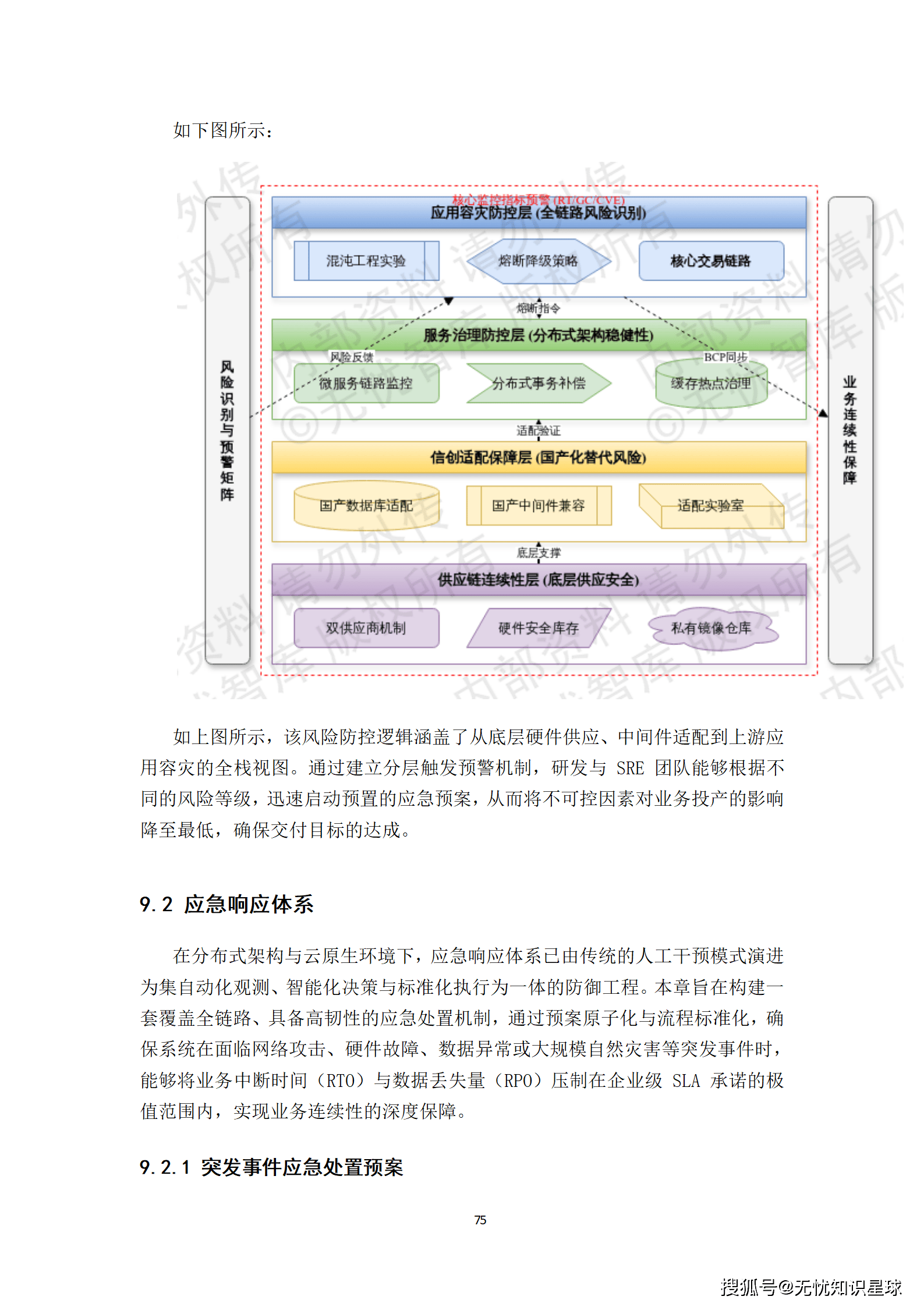
在技术演进的狂热背后,调研数据揭示了残酷的工业现实。具身智能在垂直行业的深度渗透面临着三大核心痛点:
工业现场并非实验室那般一尘不染。光照突变、动态障碍物频发、弱纹理场景(如洁净室白墙)是常态。统计显示,当环境动态变化率超过 30% 时,主流 SLAM 算法的重定位失败率会显著上升,直接威胁生产安全。
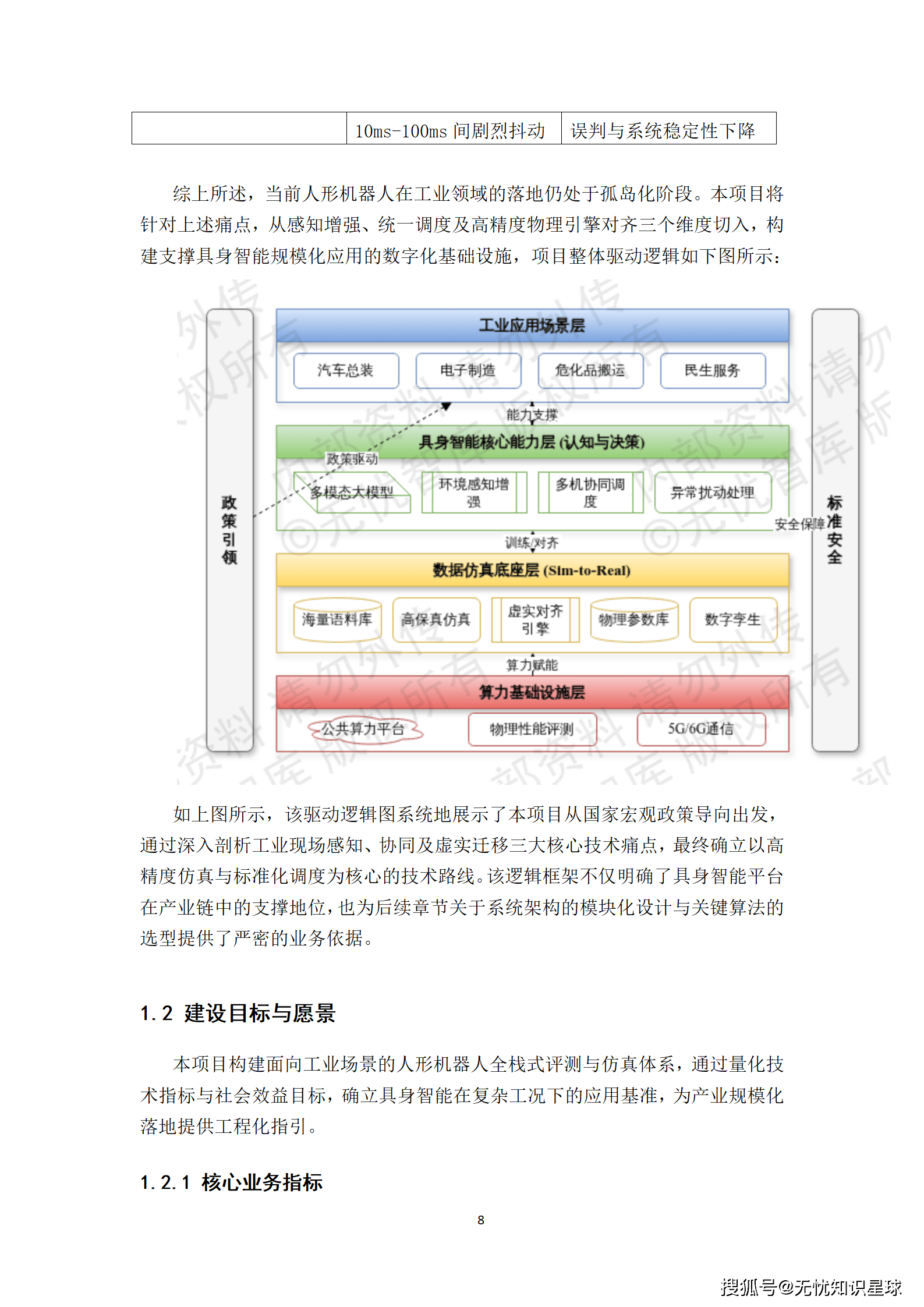
这是具身智能领域的“死亡之谷”。由于仿真平台对物理世界的摩擦系数、关节刚度等关键参数的对齐率不足 80%,导致在虚拟环境中表现卓越的算法,部署到物理实机后性能大幅下滑。
在狭窄的工业工位中,多台异构机器人协同作业时,由于缺乏统一的调度标准,死锁率往往超过 15%。这不仅降低了效率,更增加了运维的复杂度。
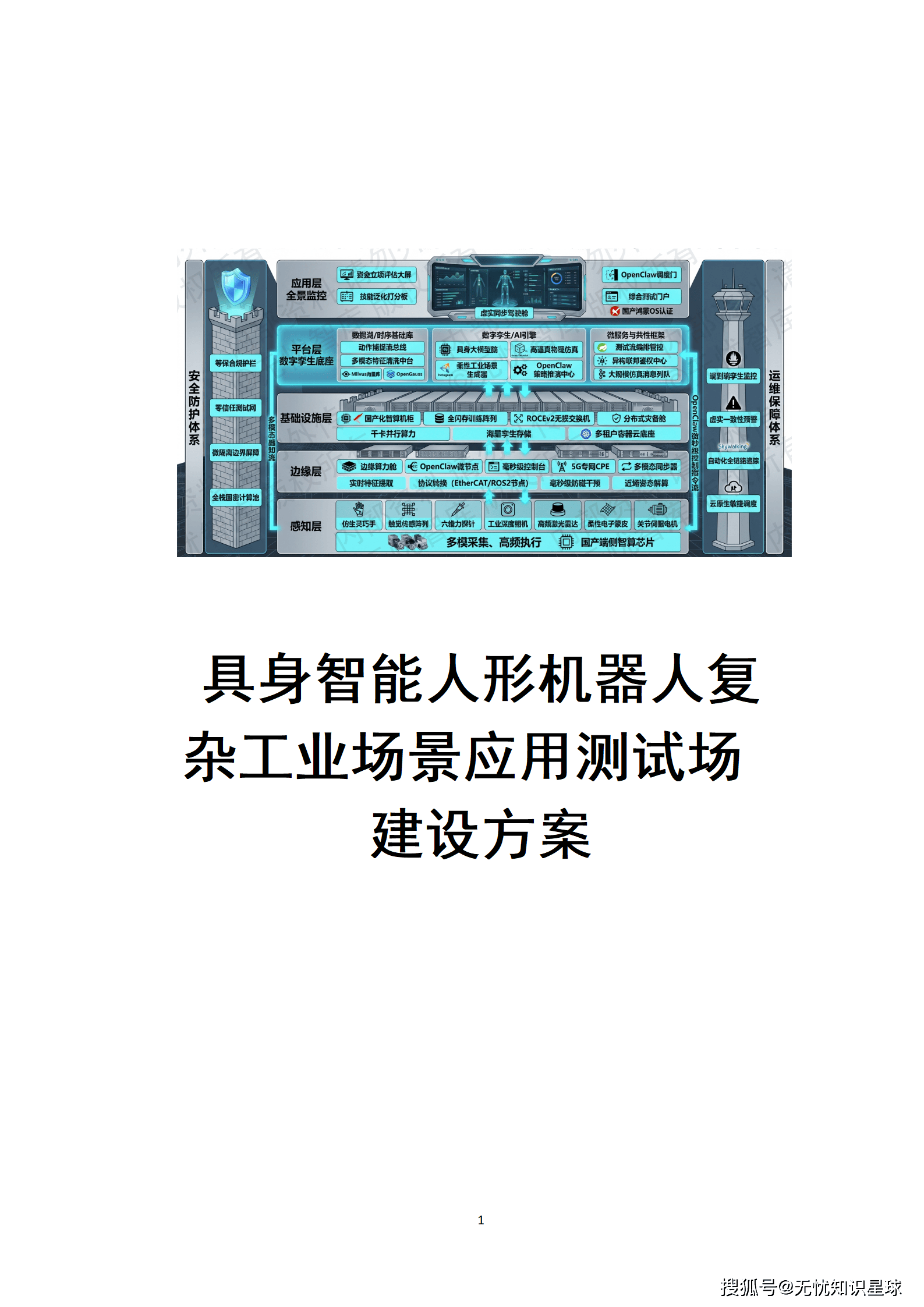
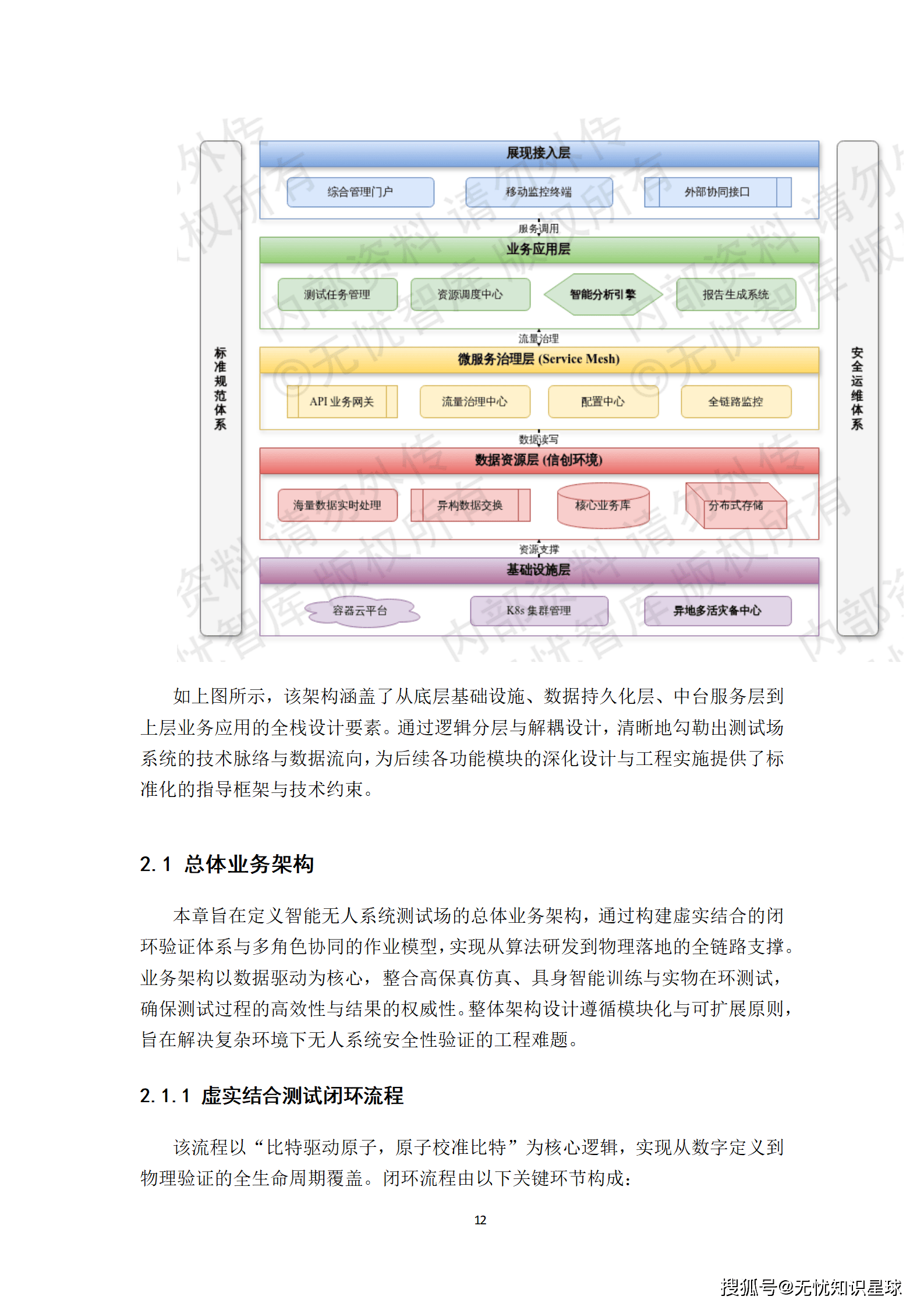
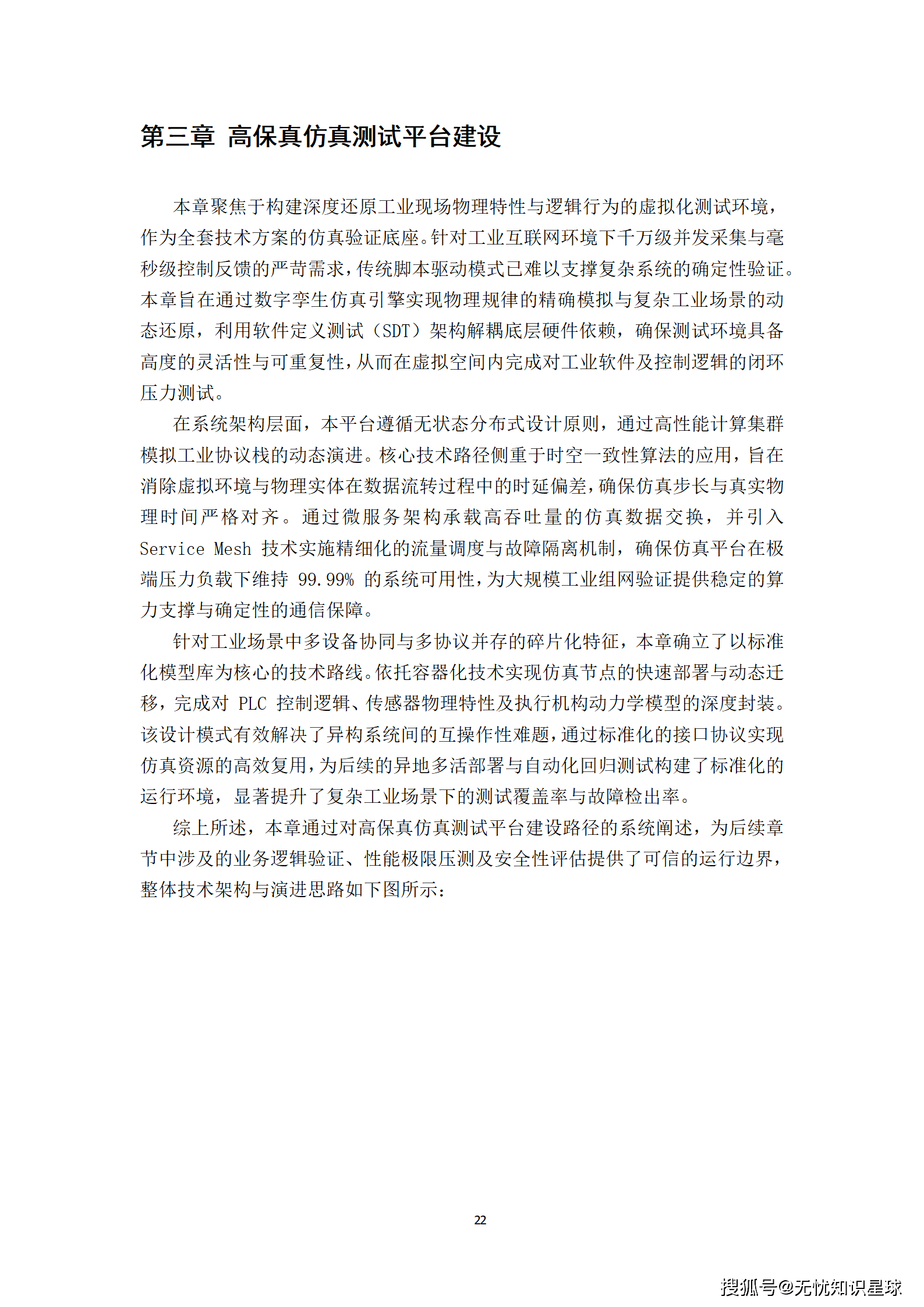
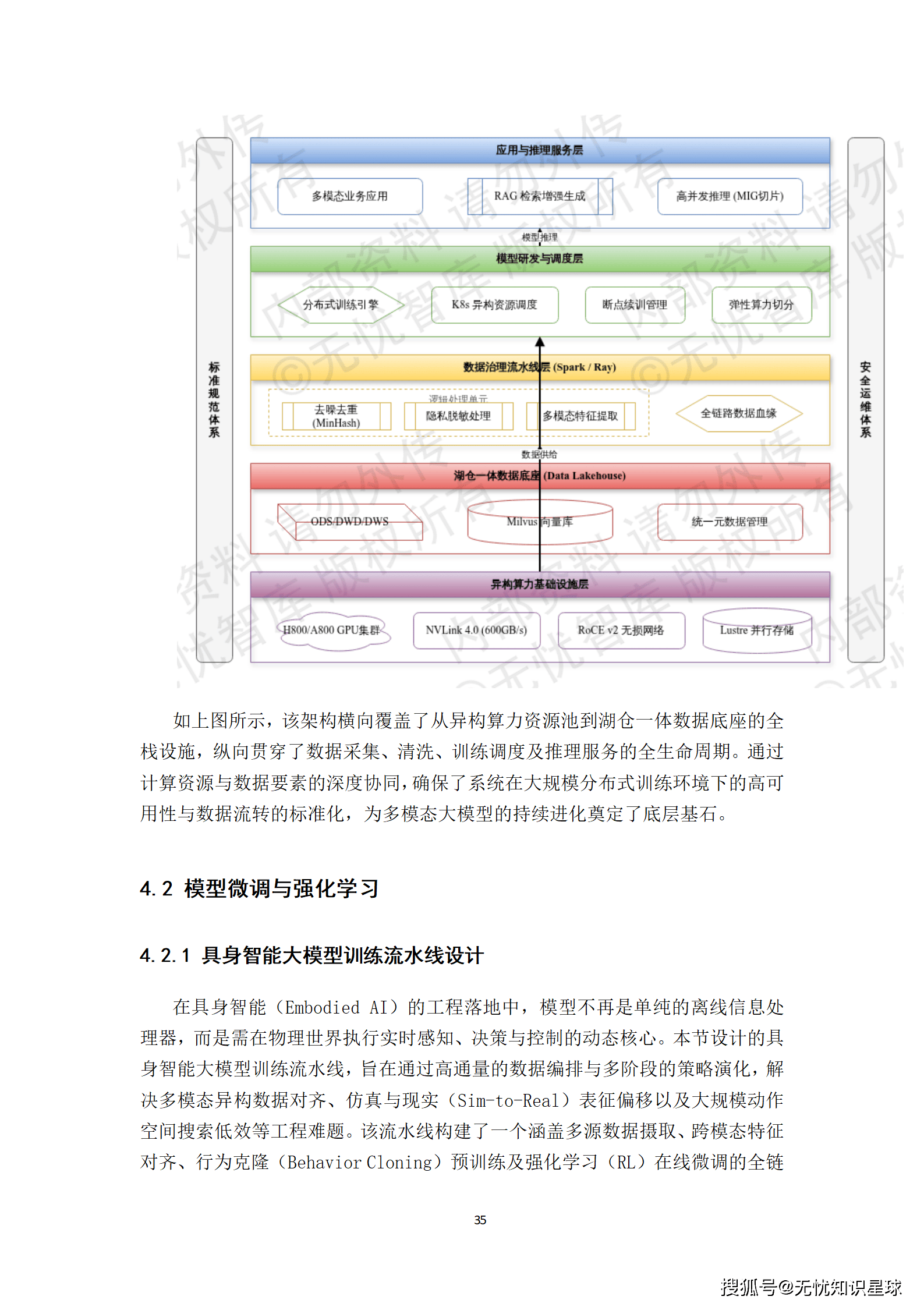
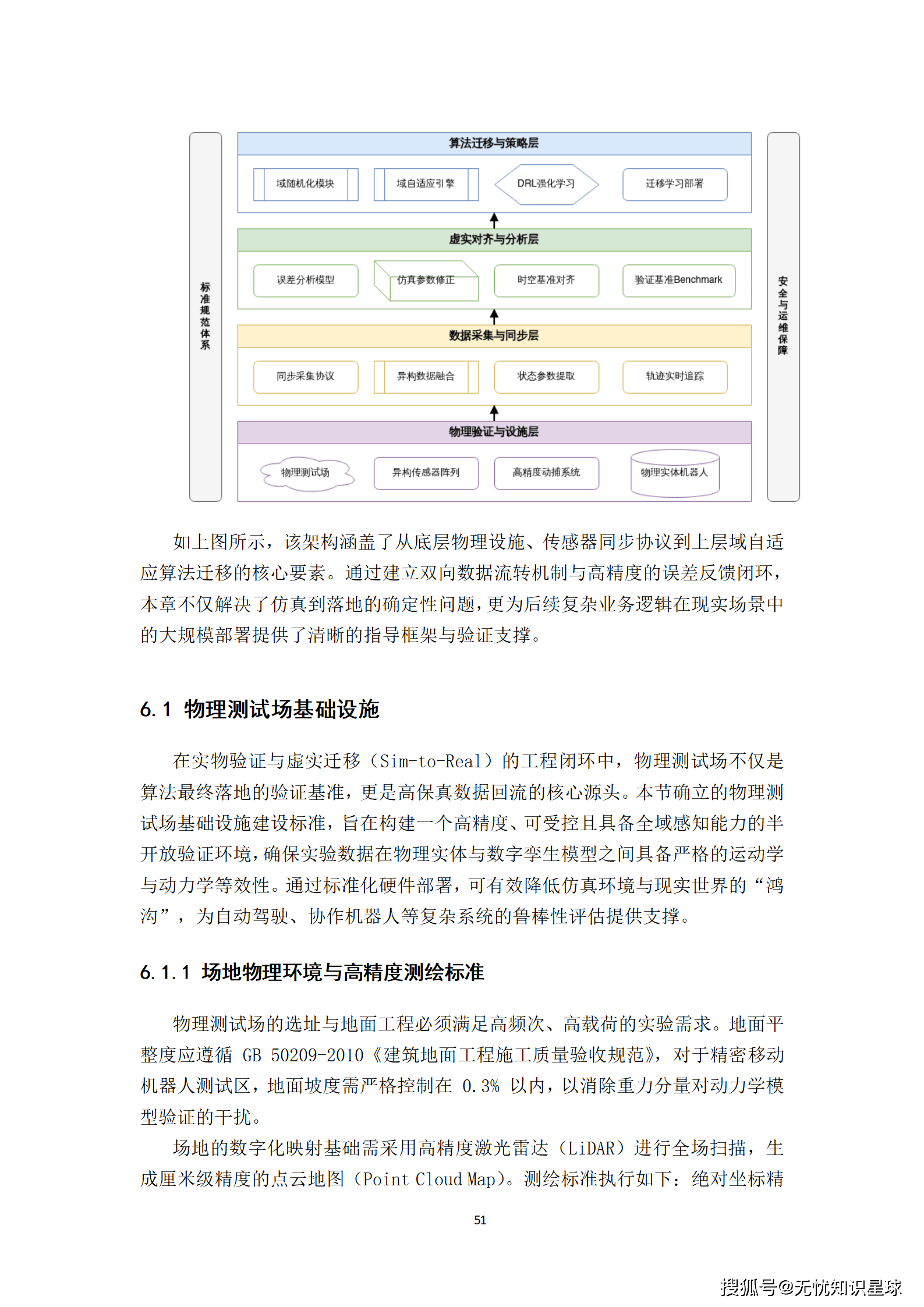
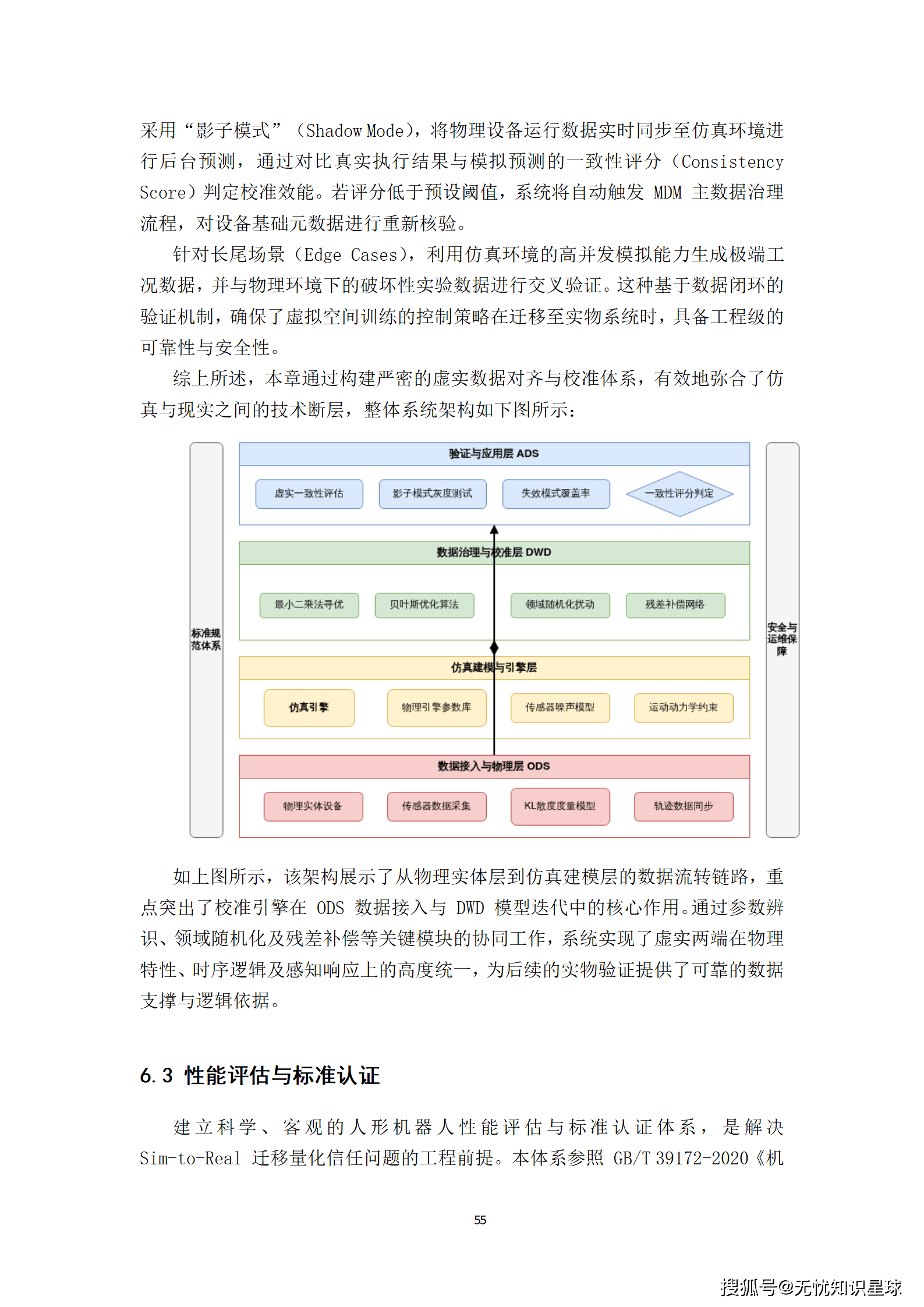
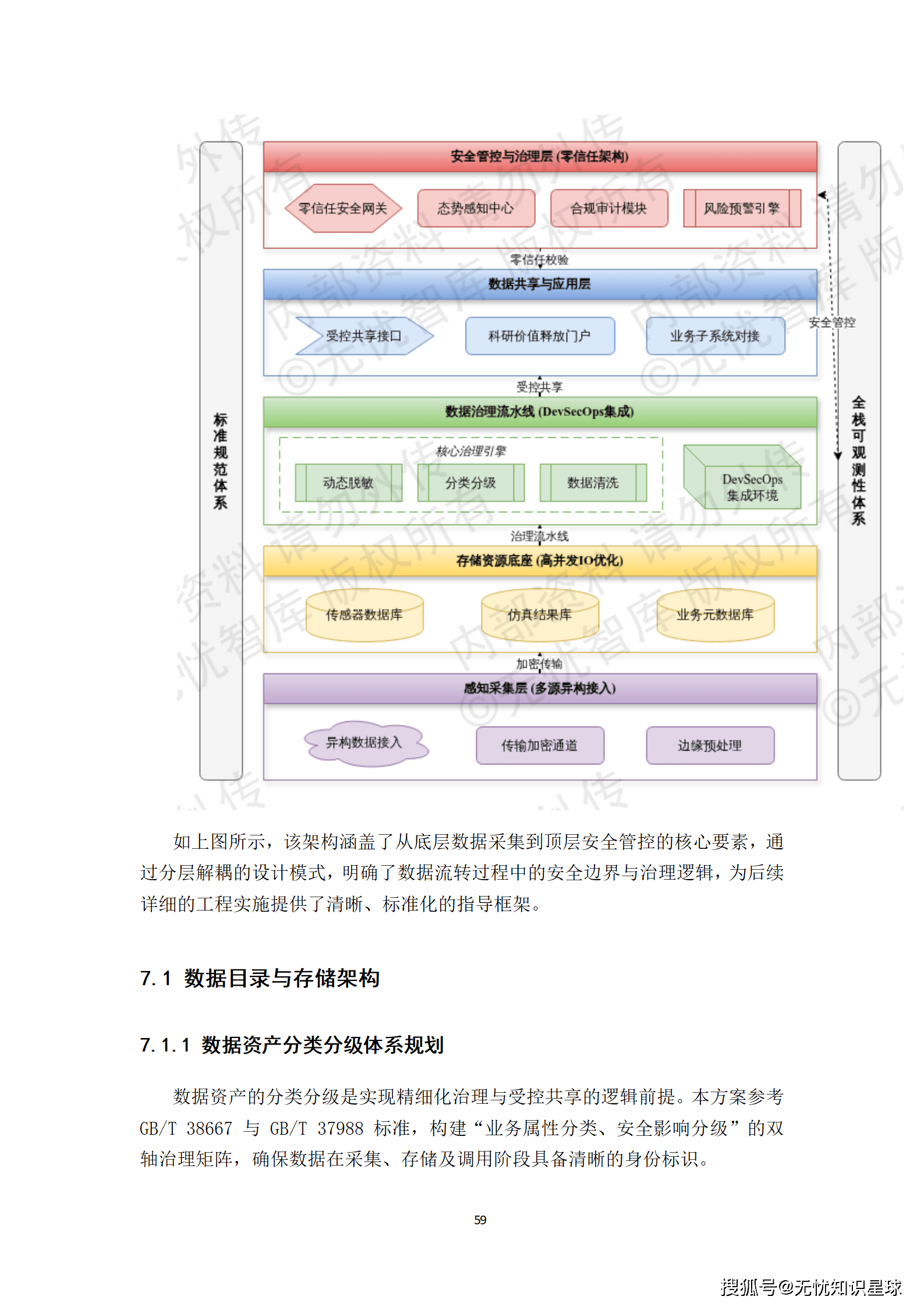
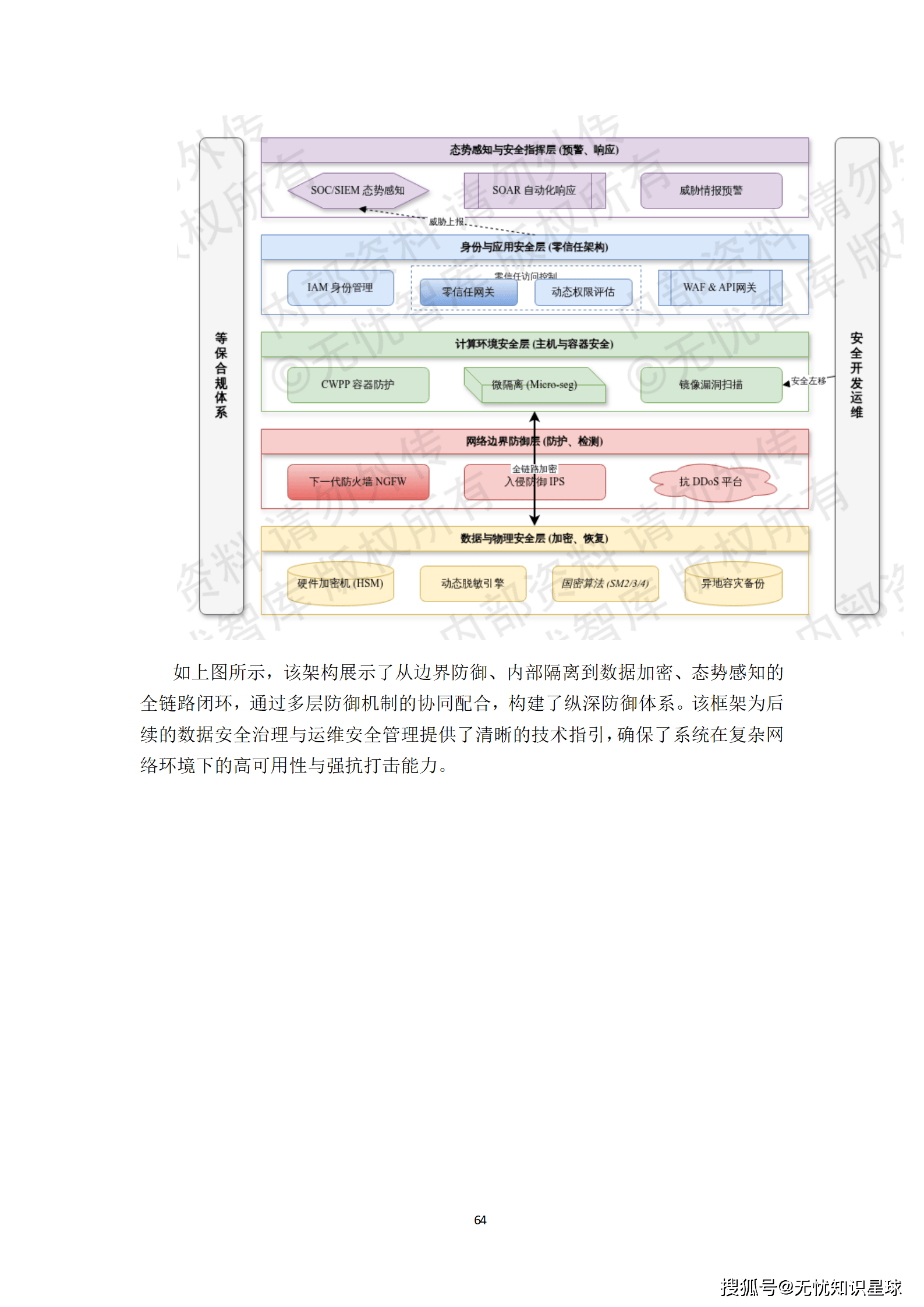
本方案确立了**“分层解耦、信创适配、虚实结合”**的顶层设计框架。
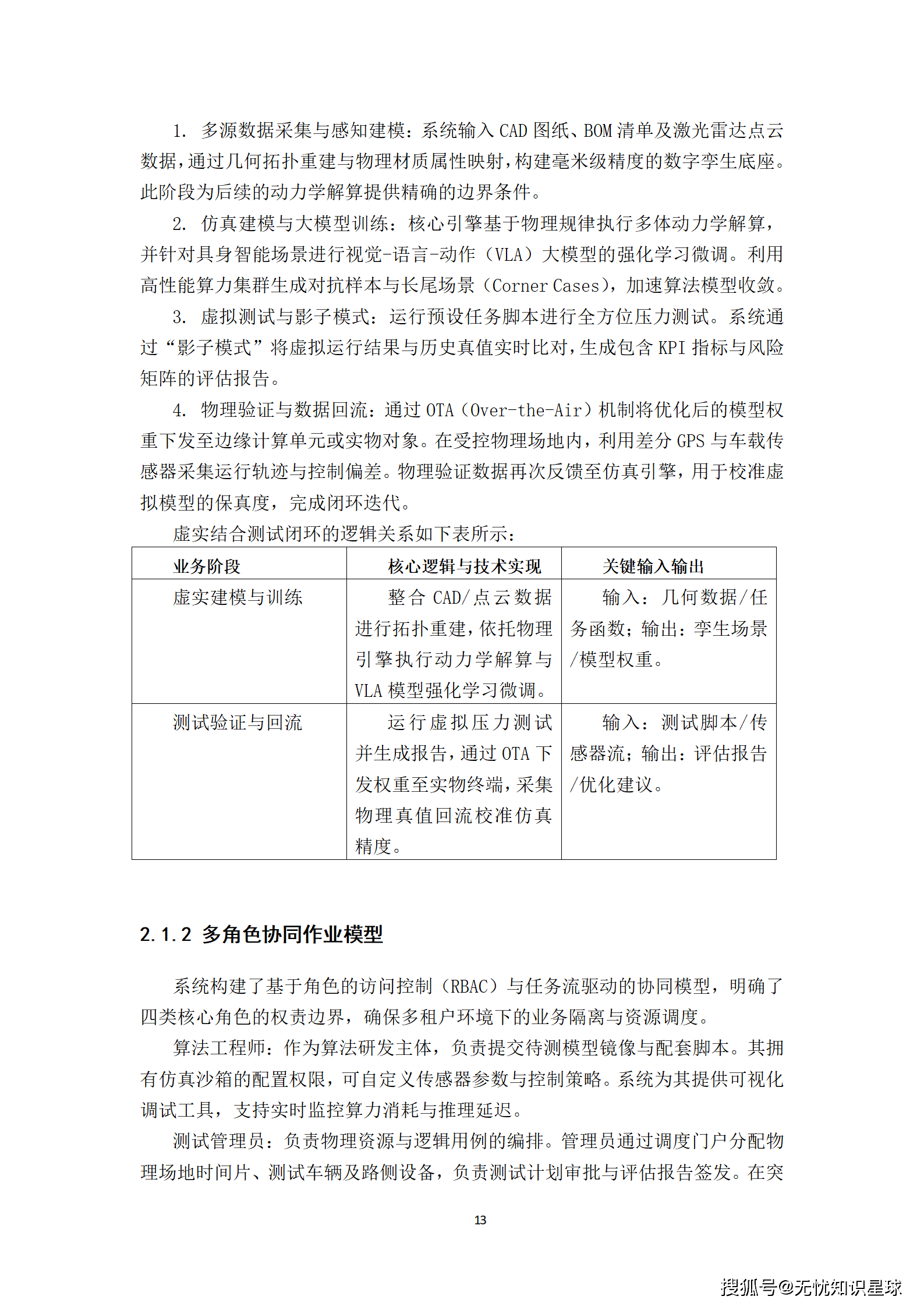
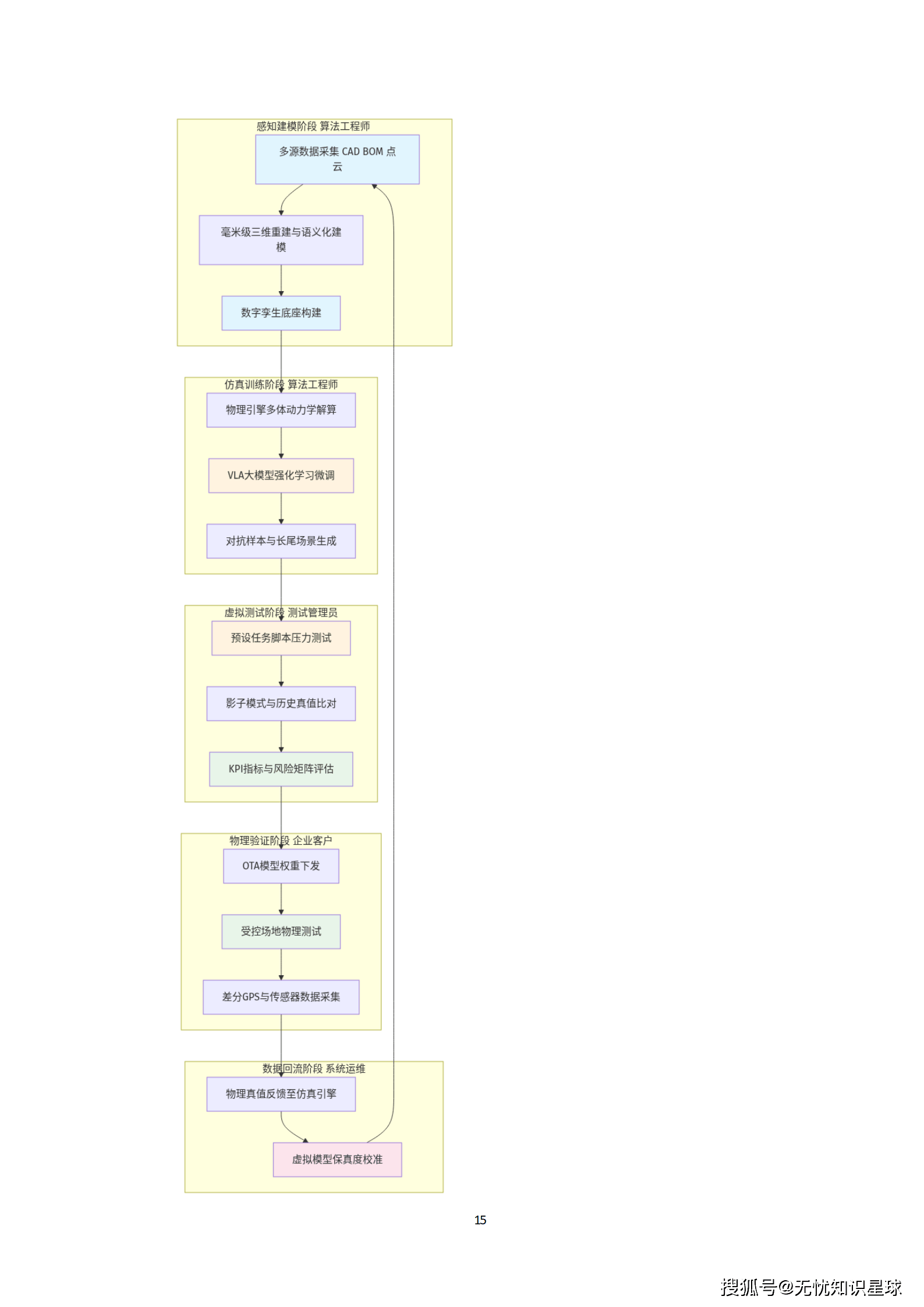
业务逻辑遵循一个核心闭环:
- 感知建模:通过 CAD 和激光点云构建毫米级精度的数字孪生底座。
- 大模型训练:基于物理规律进行 VLA(视觉-语言-动作)大模型的强化学习微调。
- 影子模式测试:在虚拟环境中进行压力测试,生成 KPI 评估报告。
- 物理验证与回流:通过 OTA 下发权重,采集物理真值,反向校准仿真模型。
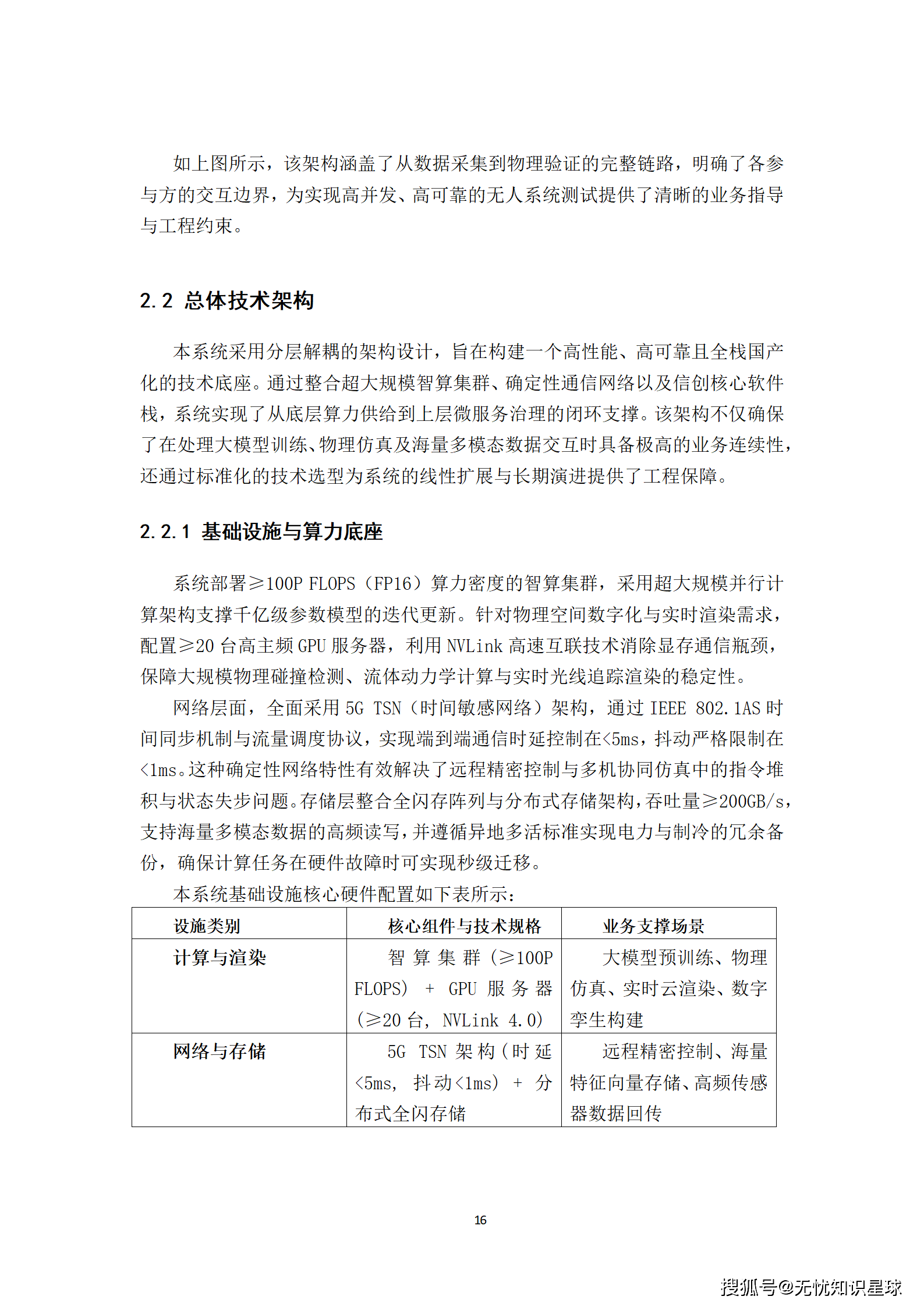
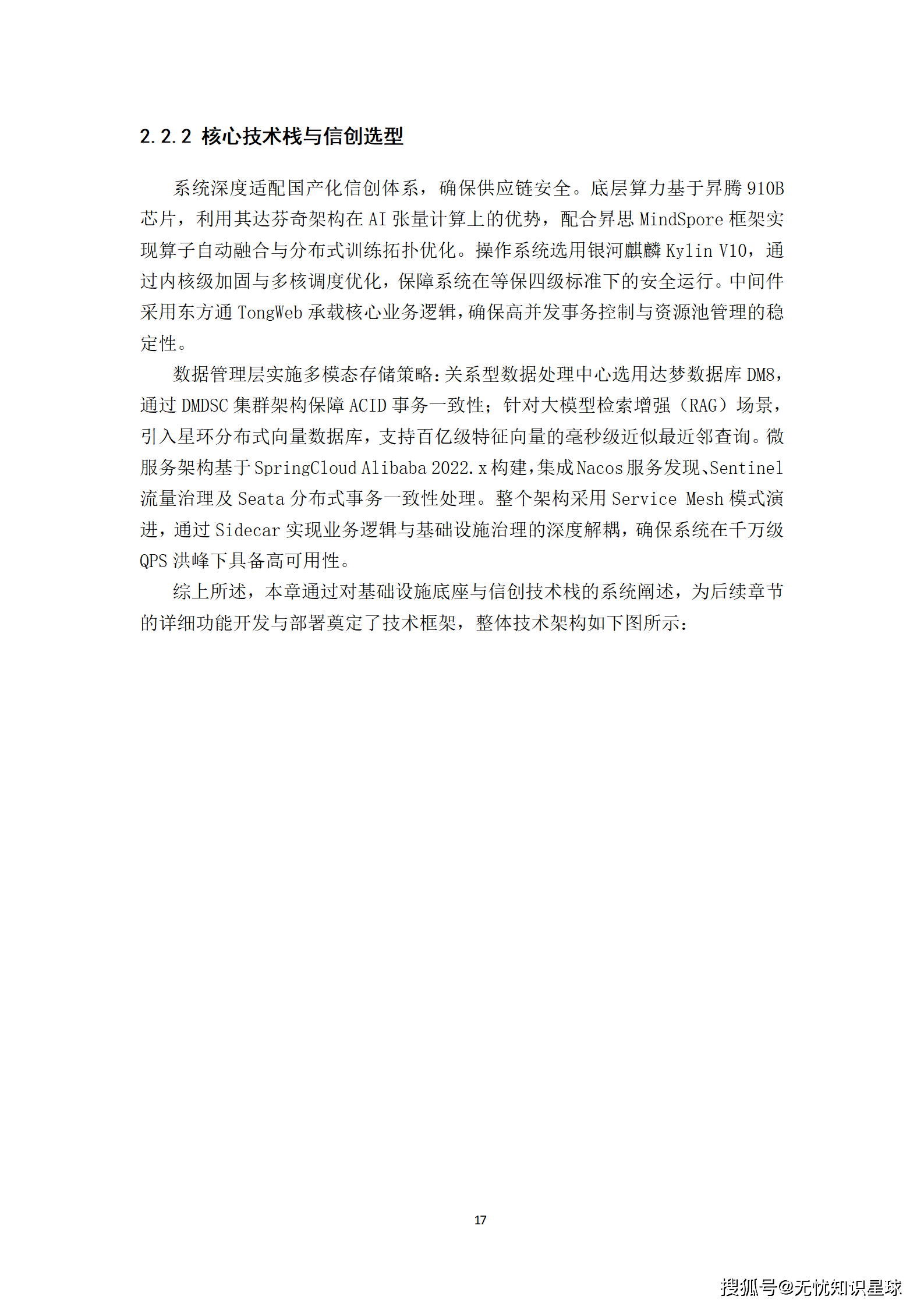
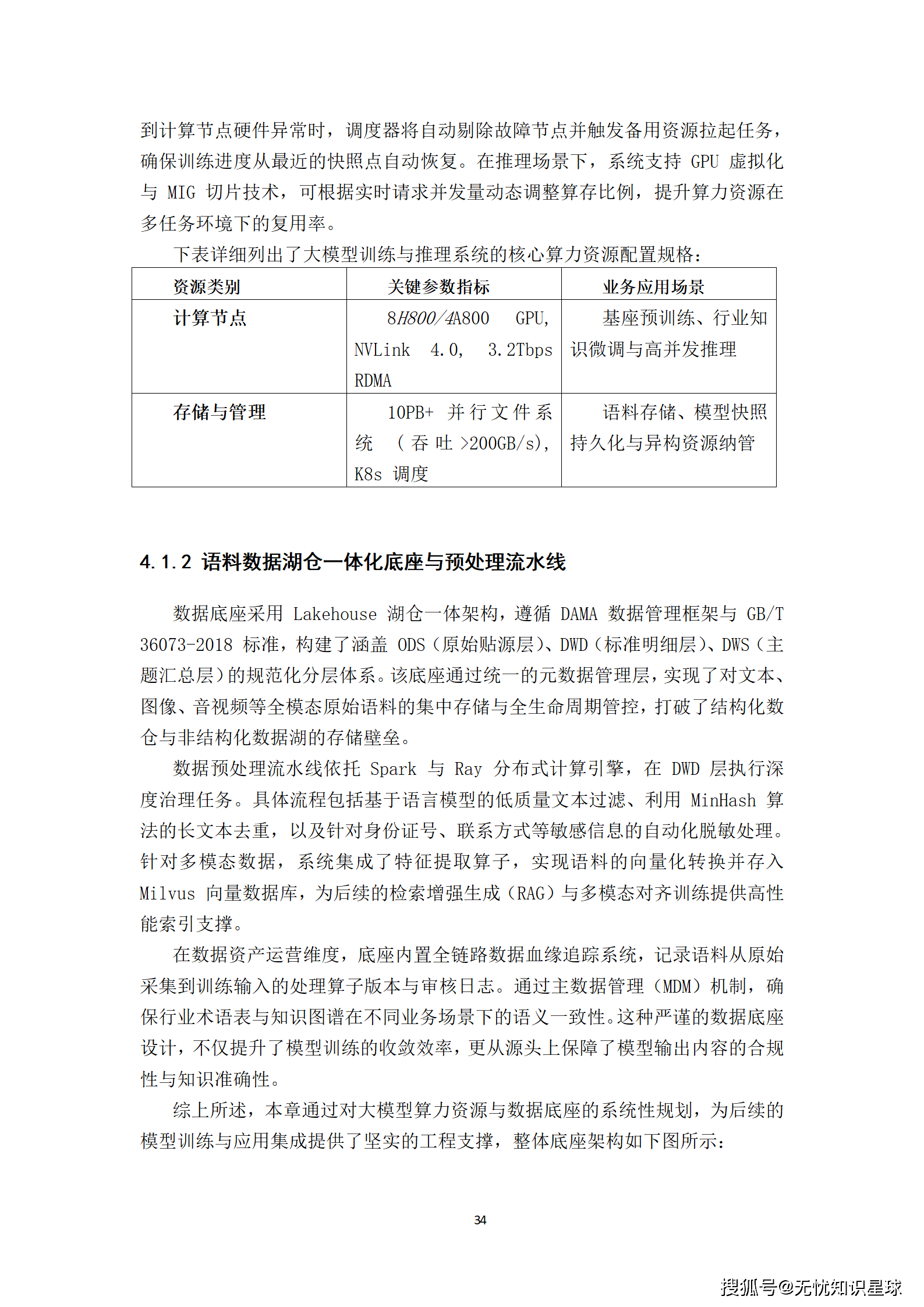
为了支撑千亿级参数模型的迭代,方案部署了 ≥100P FLOPS (FP16) 算力密度的智算集群。
- 计算层:基于昇腾 910B 芯片与昇思 MindSpore 框架,确保底层算力的自主可控。
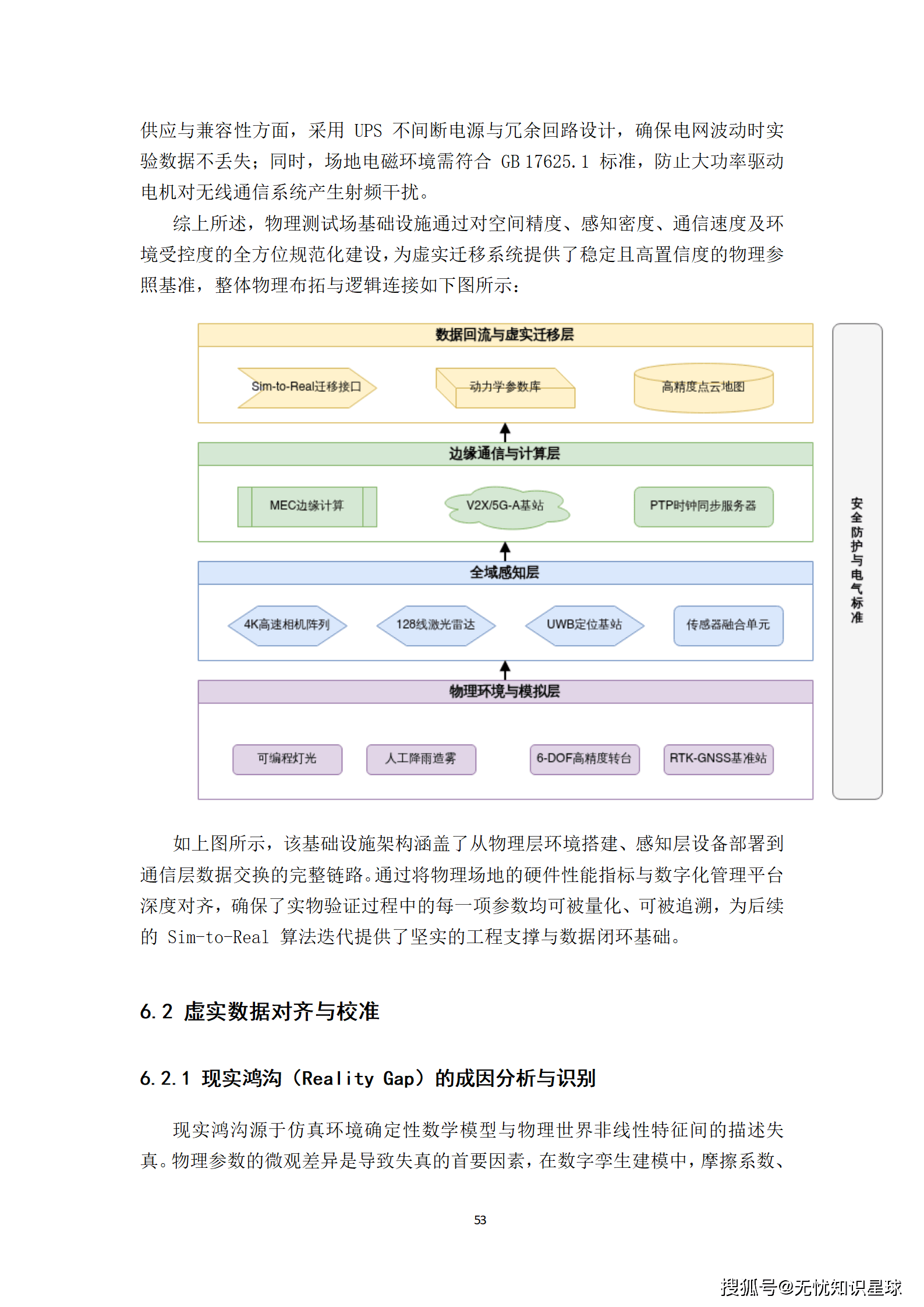
- 网络层:采用 5G TSN(时间敏感网络),将时延控制在 <5ms,抖动限制在 <1ms,解决了远程精密控制的同步问题。
- 数据层:引入星环分布式向量数据库,支撑百亿级特征向量的毫秒级检索(RAG)。
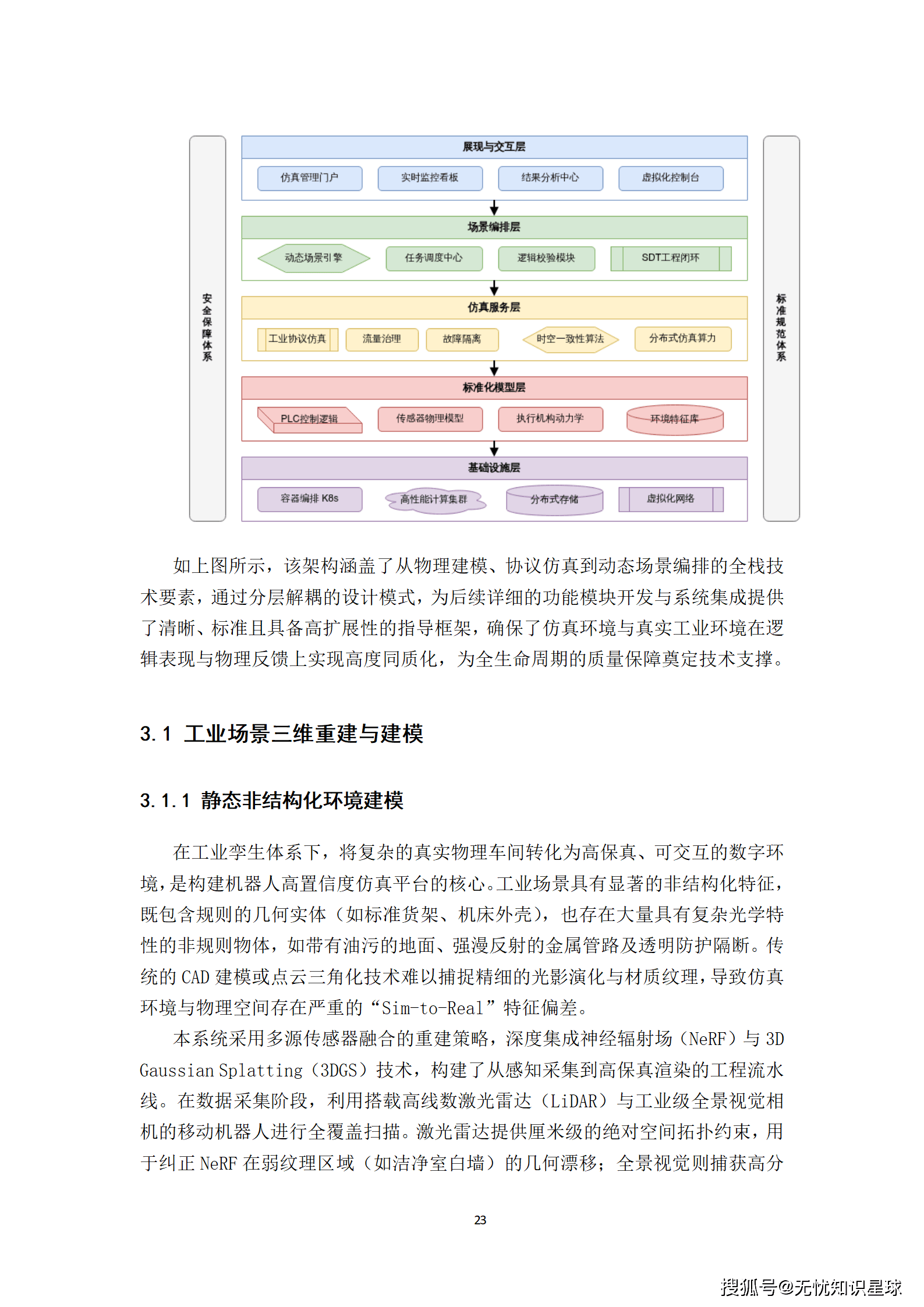
如何让虚拟世界拥有“物理真实感”?这是仿真平台的首要任务。
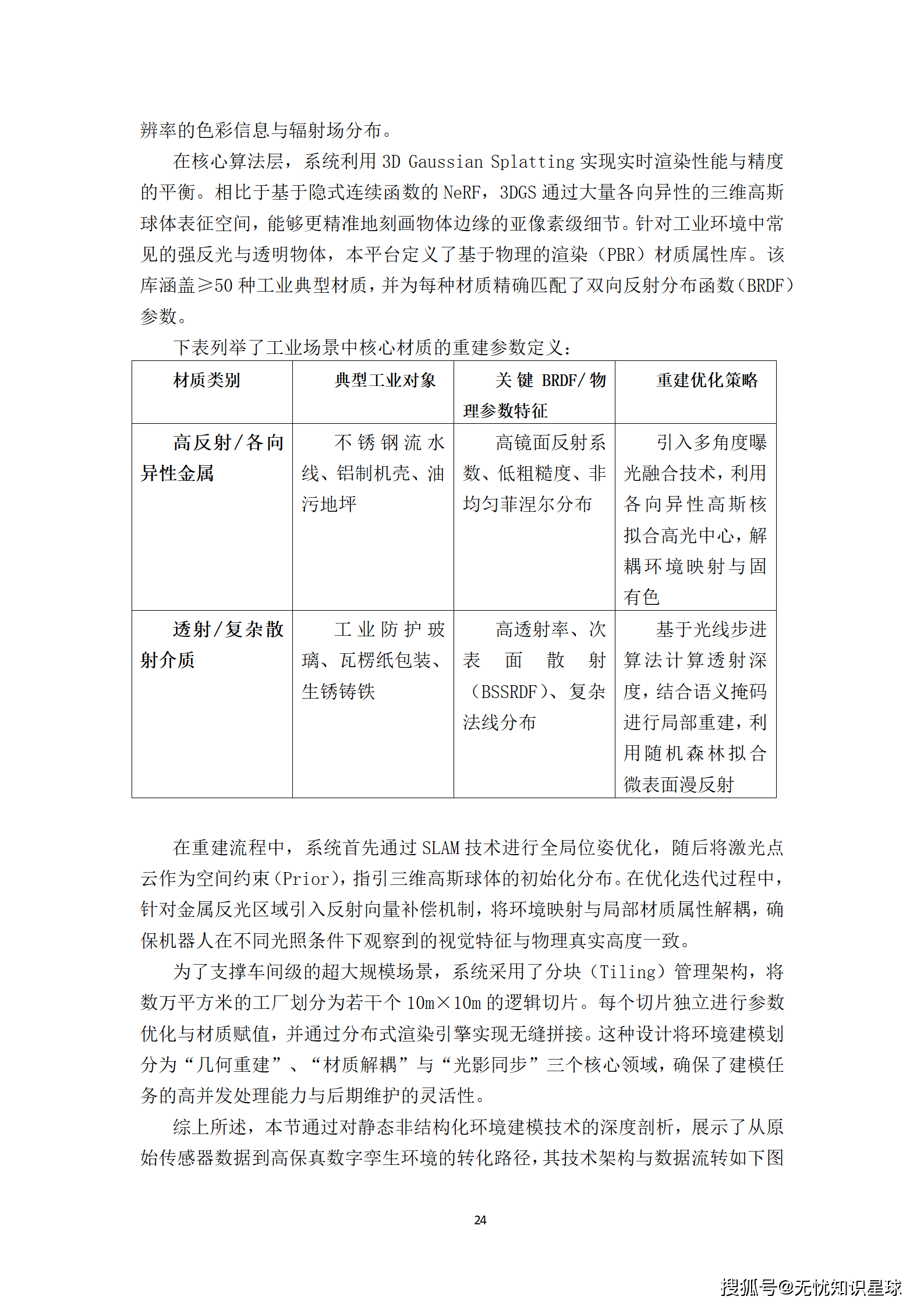
方案摒弃了传统的简单三角网格建模,深度集成 NeRF(神经辐射场) 与 3D Gaussian Splatting (3DGS) 技术。
-
材质解耦:针对工业场景中常见的高反射金属(如不锈钢流水线),定义了基于物理的渲染(PBR)材质属性库,匹配 BRDF(双向反射分布函数) 参数。
-
分块管理:采用 Tiling 架构将数万平米的车间逻辑切片,确保超大规模场景的渲染效率。
-
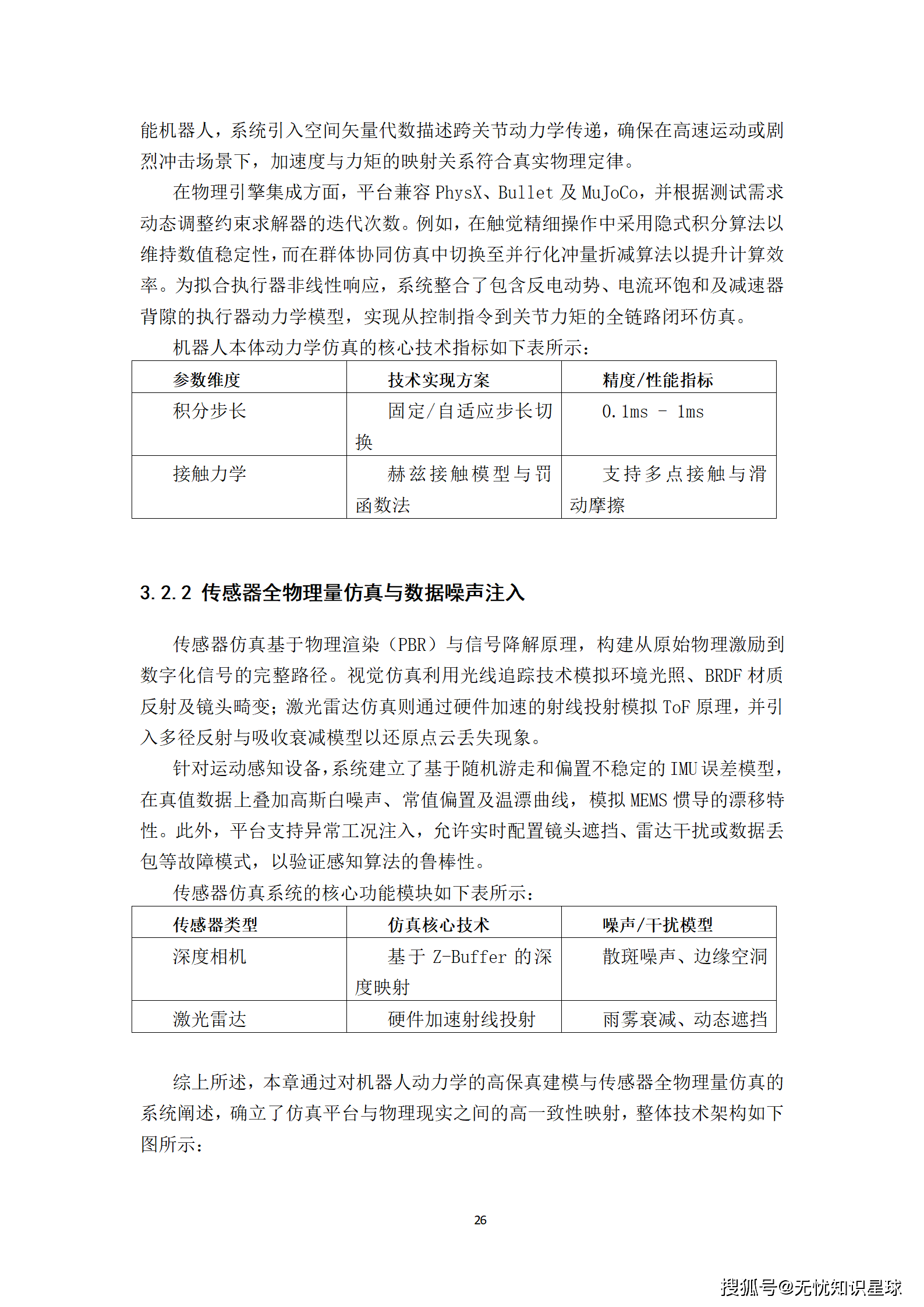
动力学精度:引入空间矢量代数描述跨关节动力学,积分步长达到 0.1ms - 1ms,确保在剧烈冲击下的数值稳定性。
-
传感器噪声注入:不仅模拟光线,还建立了基于随机游走的 IMU 误差模型,真实还原 MEMS 惯导的漂移特性。
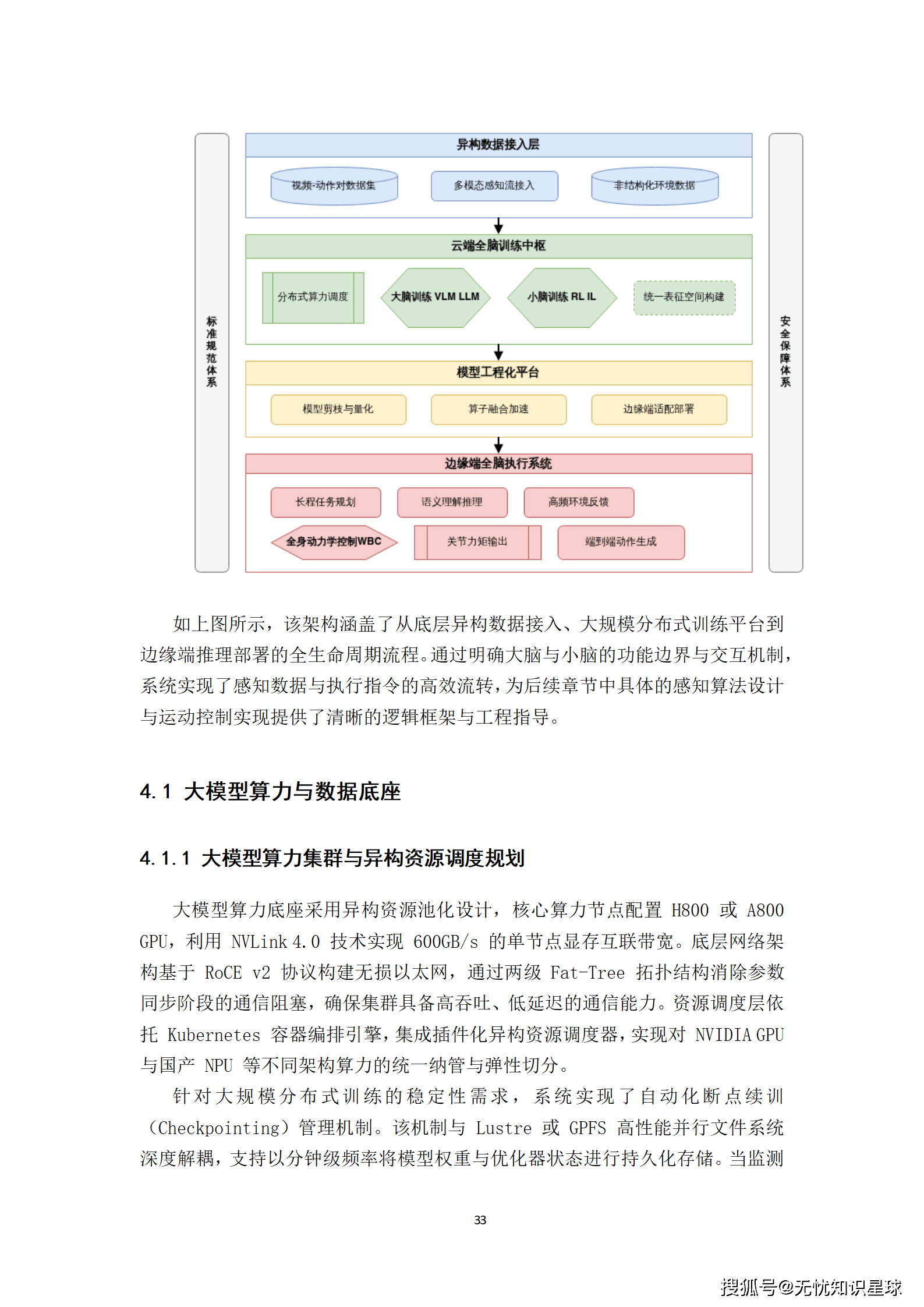
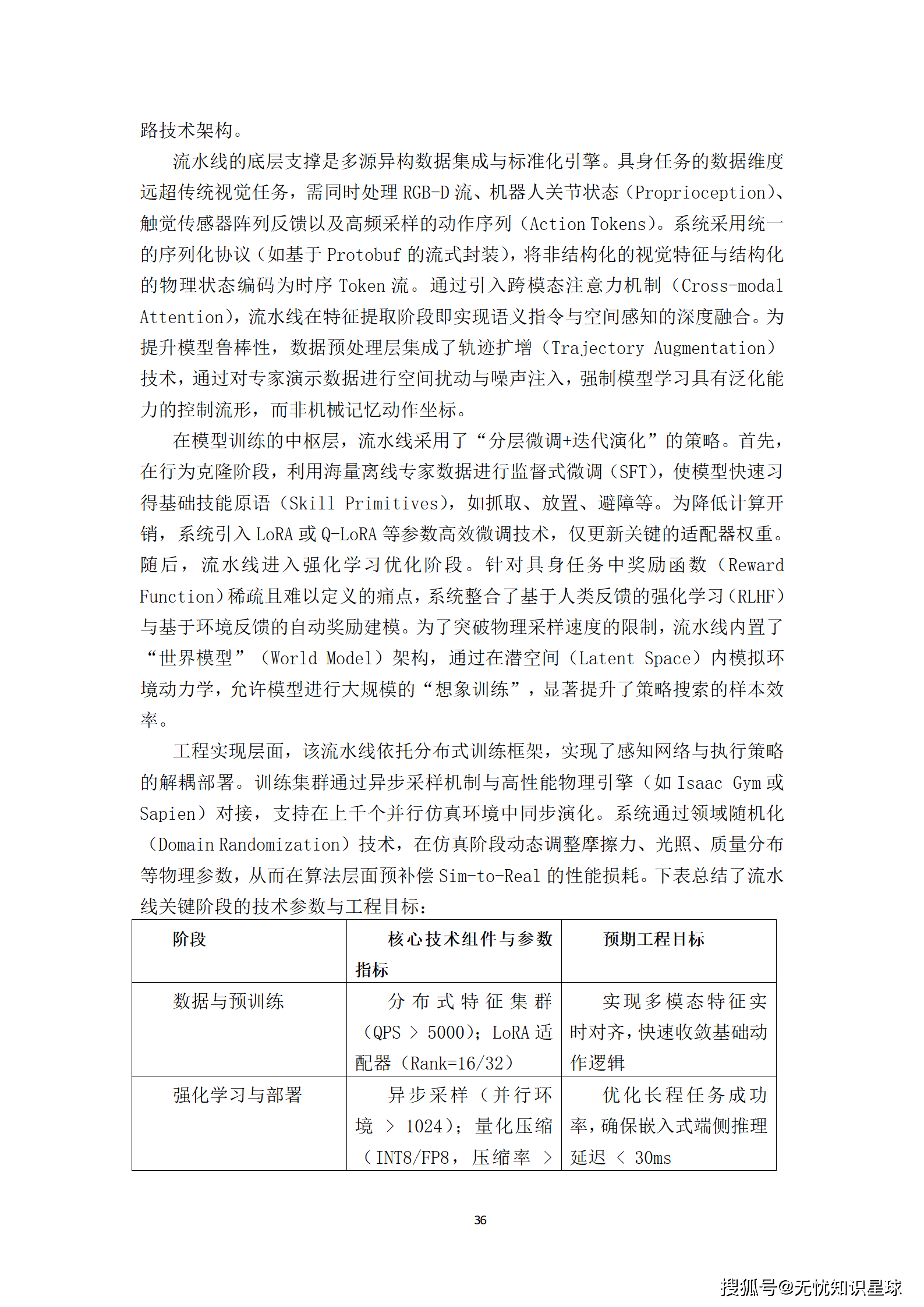
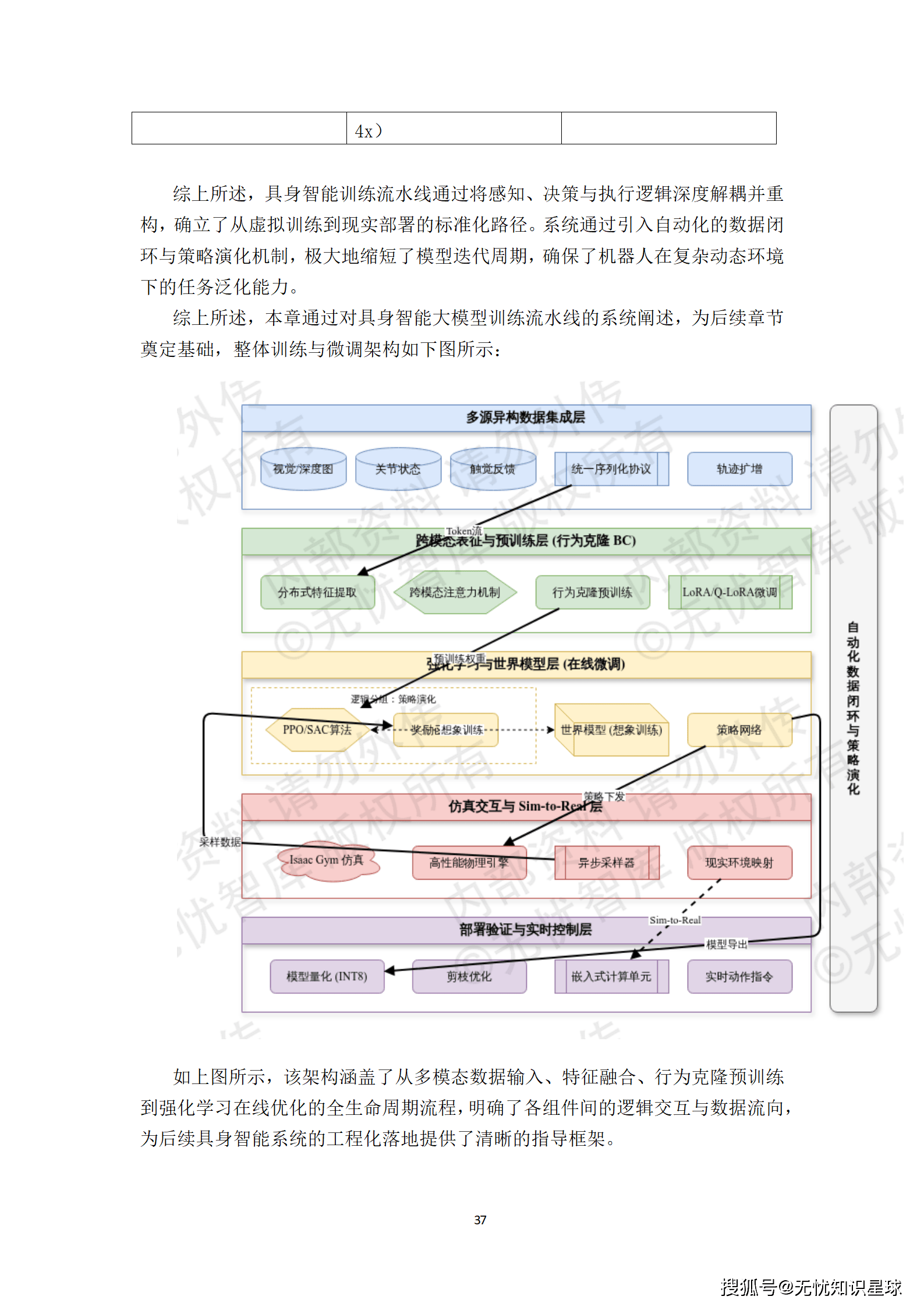
人形机器人的控制逻辑正在从“串行范式”转向“端到端学习”。
- 云端认知大脑:利用多模态大模型(VLM/LLM)负责语义理解与长程任务规划。
- 边缘运动小脑:基于强化学习(RL)与全身动力学控制(WBC),负责高频环境反馈下的平衡与精细操作。
系统通过行为克隆(Behavior Cloning)**进行预训练,习得抓取、避障等技能原语,再通过**基于环境反馈的强化学习进行在线微调。为了解决物理采样慢的问题,引入了**“世界模型”(World Model)**,在潜空间内进行“想象训练”,显著提升了样本效率。
在复杂工业任务中,如何避免机器人的“交通堵塞”?
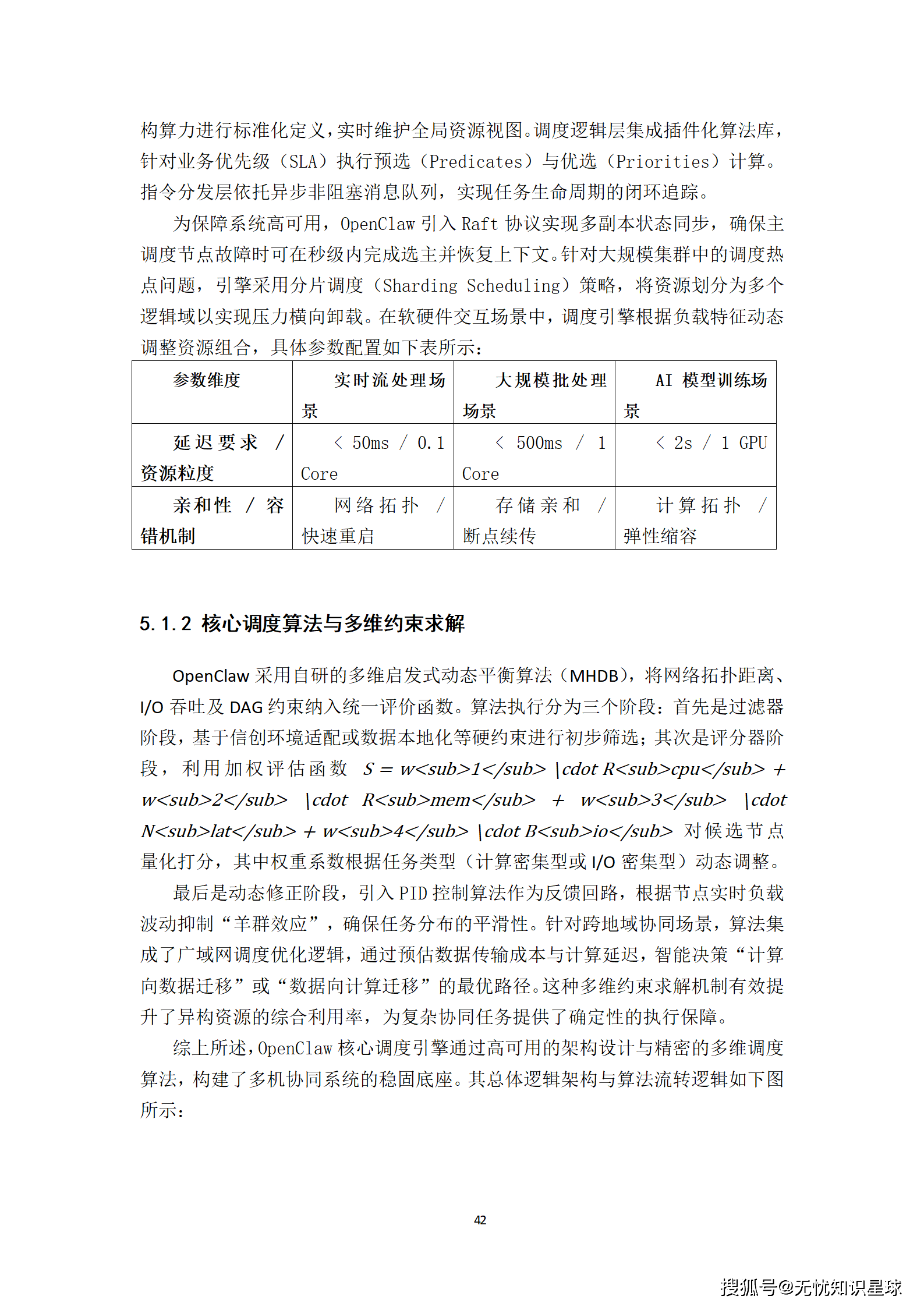
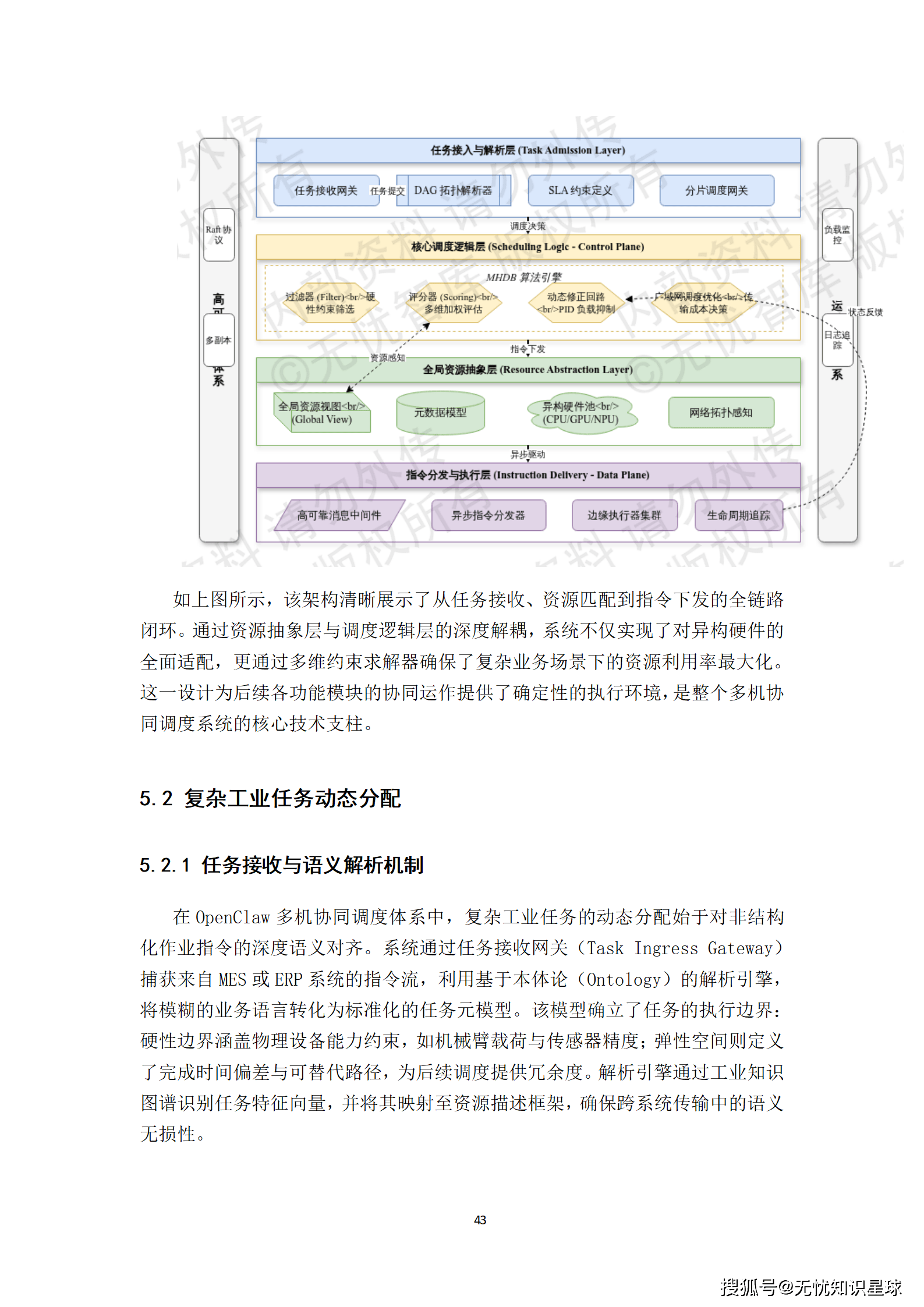
OpenClaw 引擎摒弃了静态路网,采用基于时间窗(Time Window)的动态权重图算法。它能实时采集各节点压力,在亚秒级内重调度,实现异构机器人在受限空间内的厘米级防碰撞控制。
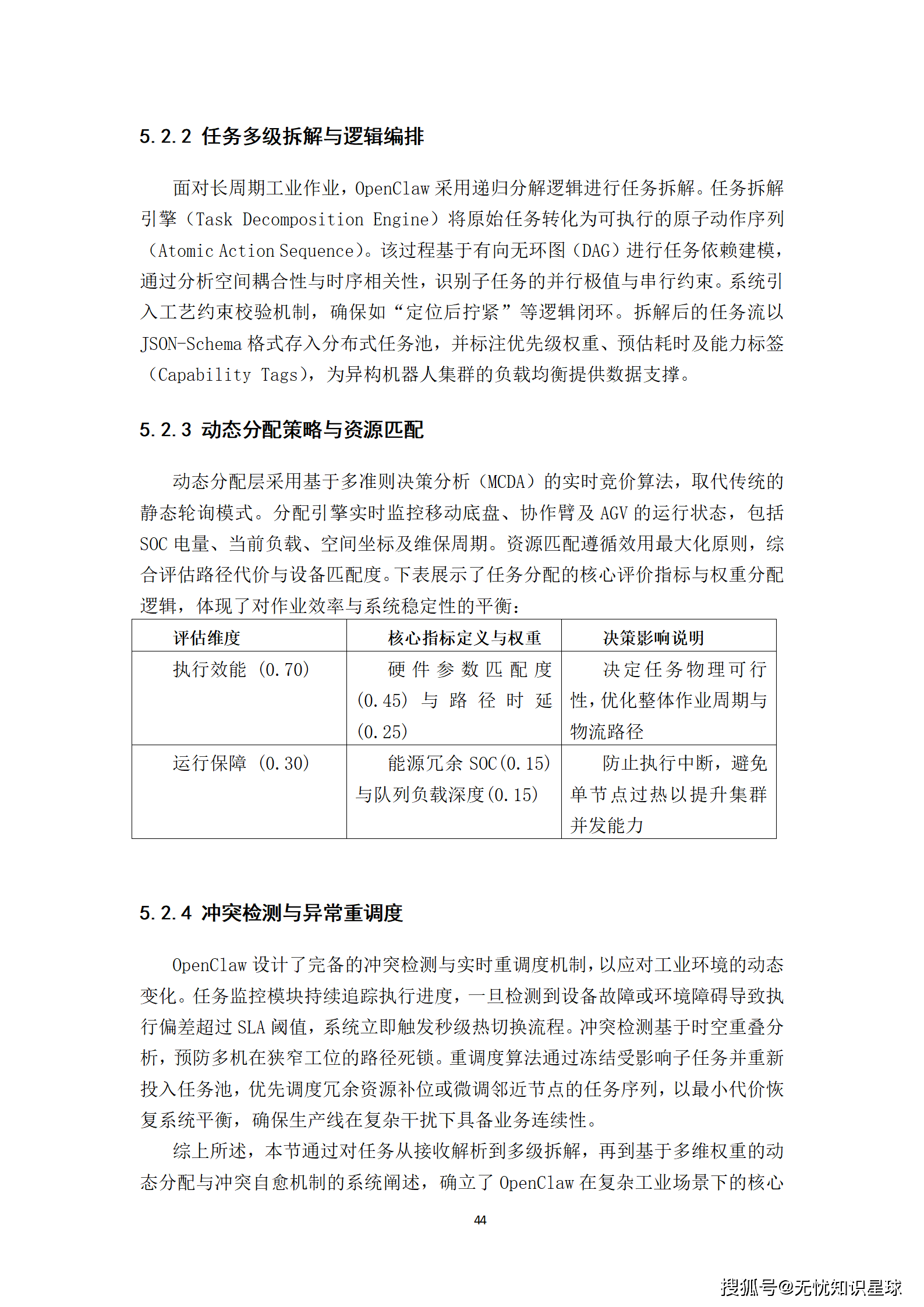
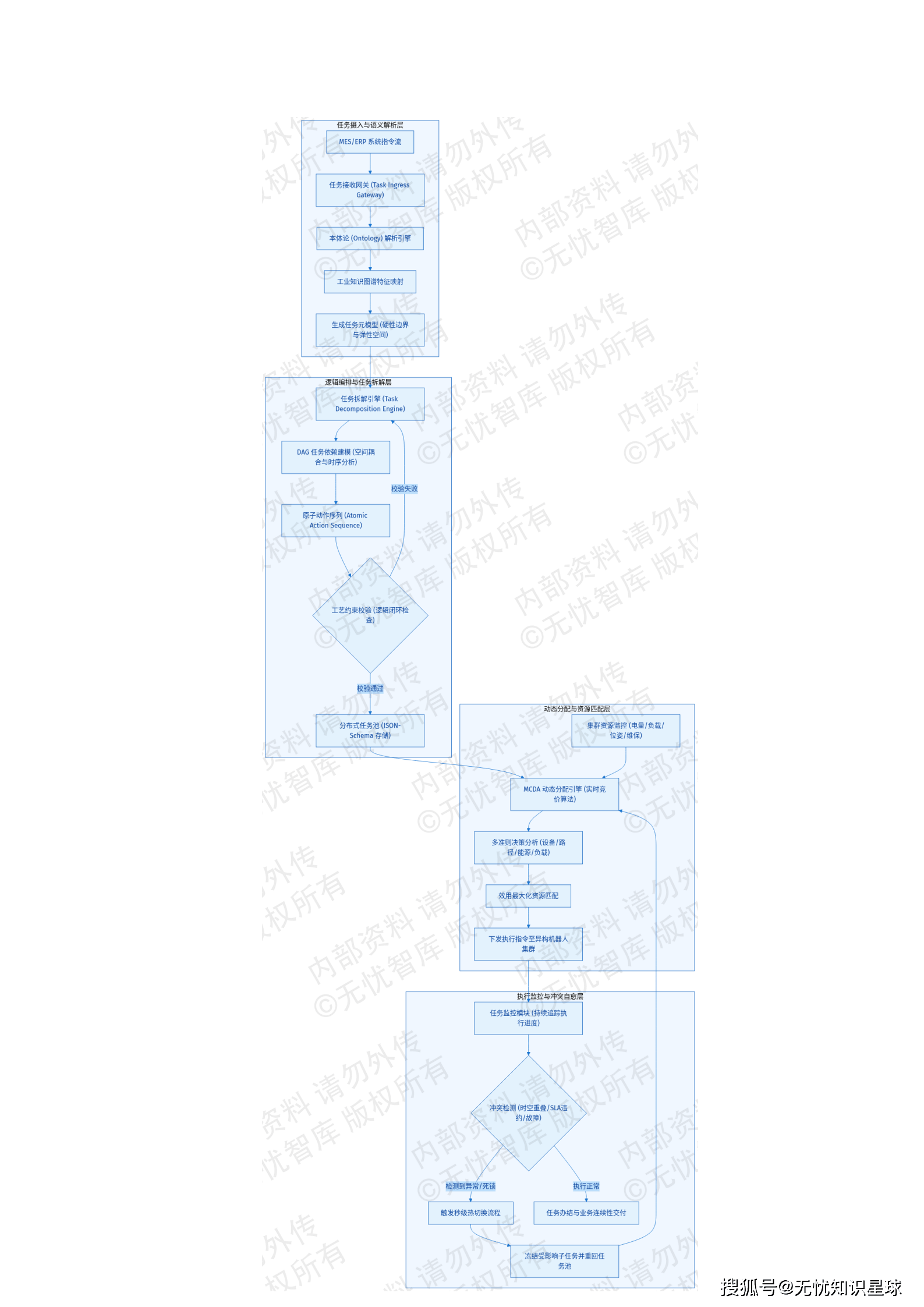
通过工业知识图谱,将模糊的业务指令(如“组装这个部件”)转化为标准化的原子动作序列(Atomic Action Sequence)。利用多准则决策分析(MCDA)竞价算法,综合评估电量、位置和负载,实现最优的任务分配。
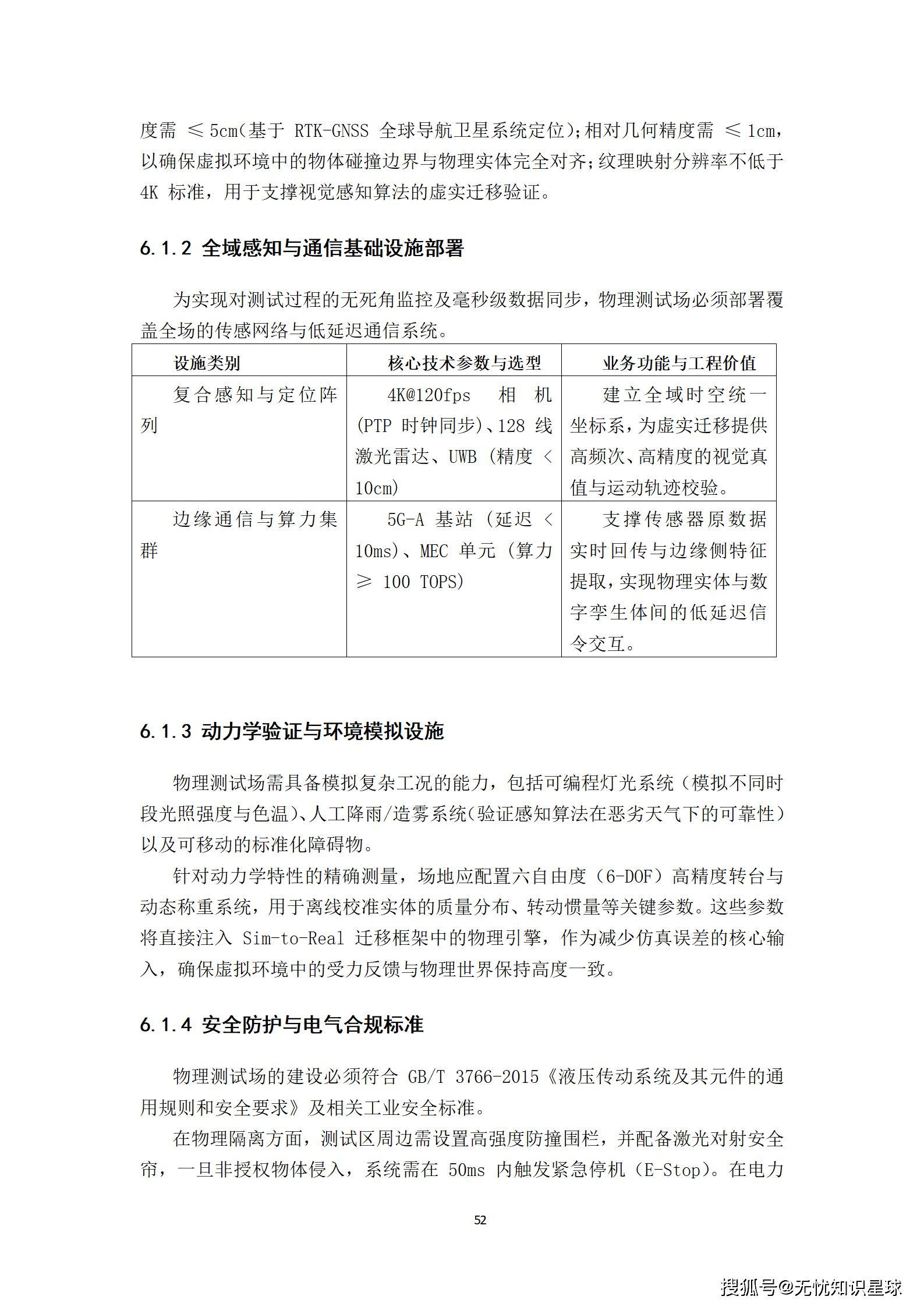
测试场不仅是场地,更是**“物理校准器”**。
物理测试场配置了亚毫米级光学动作捕捉系统和 UWB 多路径定位阵列。这些设备为虚实迁移提供了绝对位姿基准,确保实验数据具备运动学等效性。
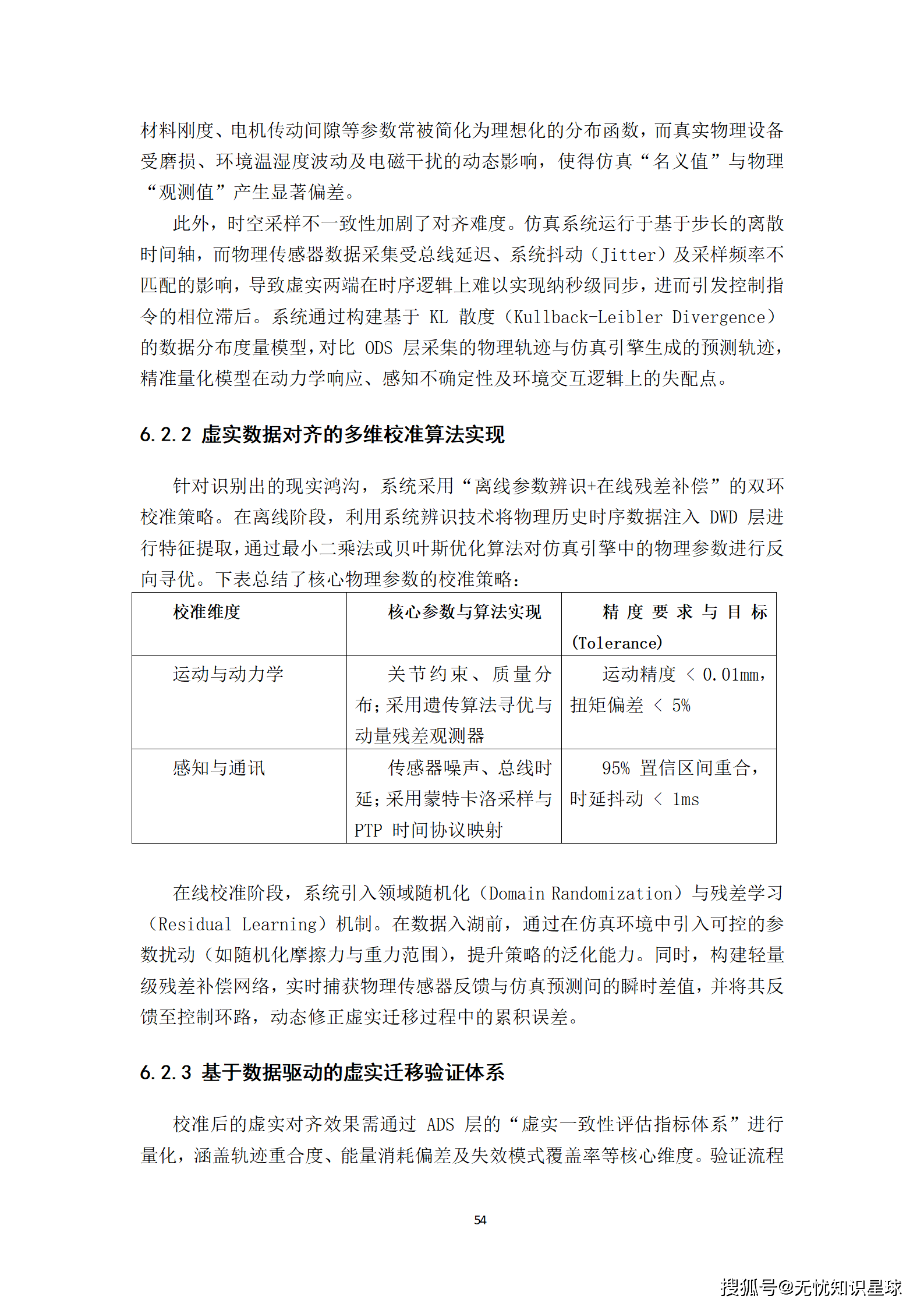
采用**“离线参数辨识 + 在线残差补偿”**的双环校准策略。
- 离线阶段:通过最小二乘法反向寻优,修正仿真引擎中的摩擦力、质量分布等参数。
- 在线阶段:引入领域随机化(Domain Randomization),在仿真中加入受控干扰,提升策略的泛化能力,确保机器人面对非预设障碍物时的鲁棒性。
在海量多模态数据面前,安全是红线。
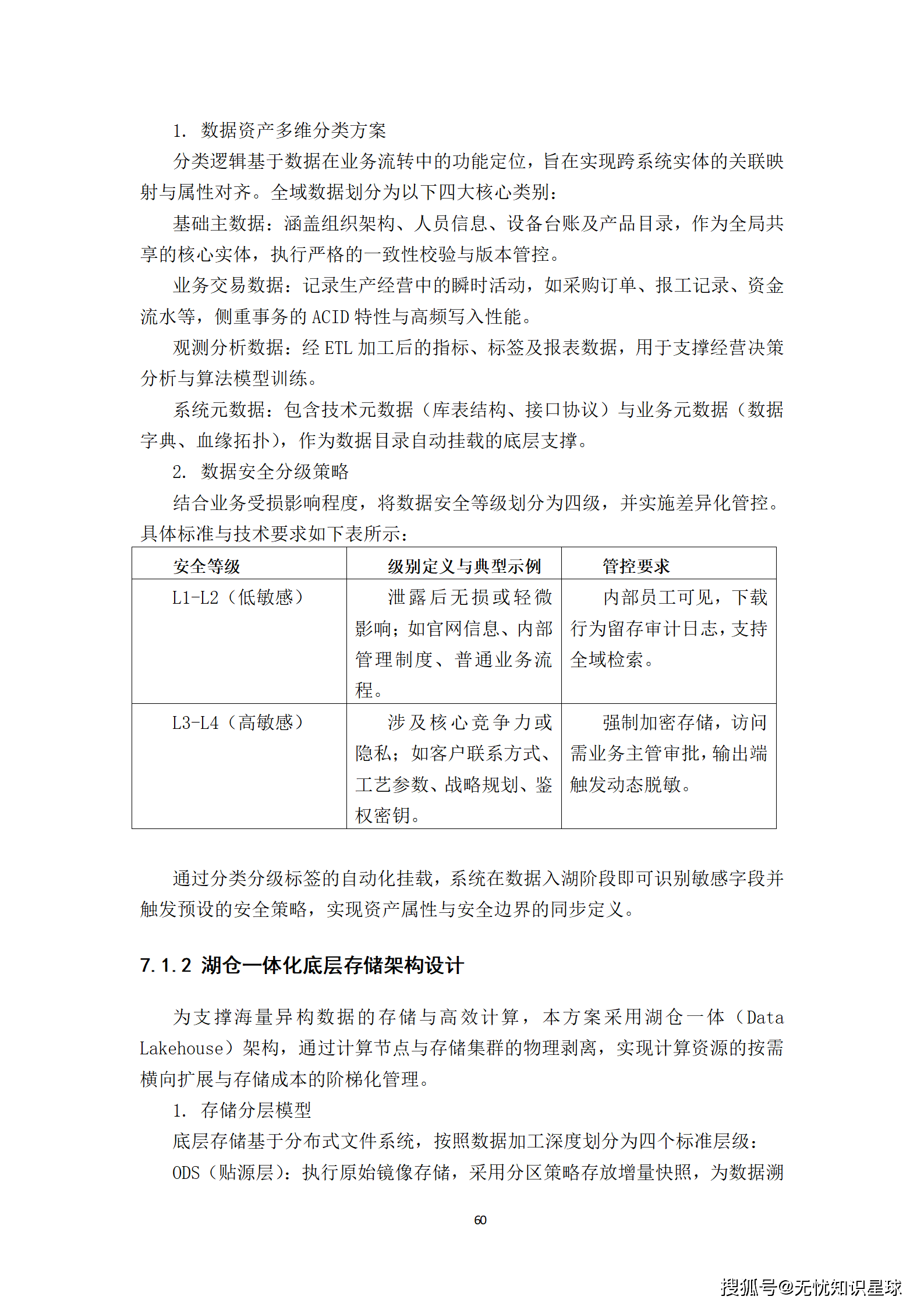
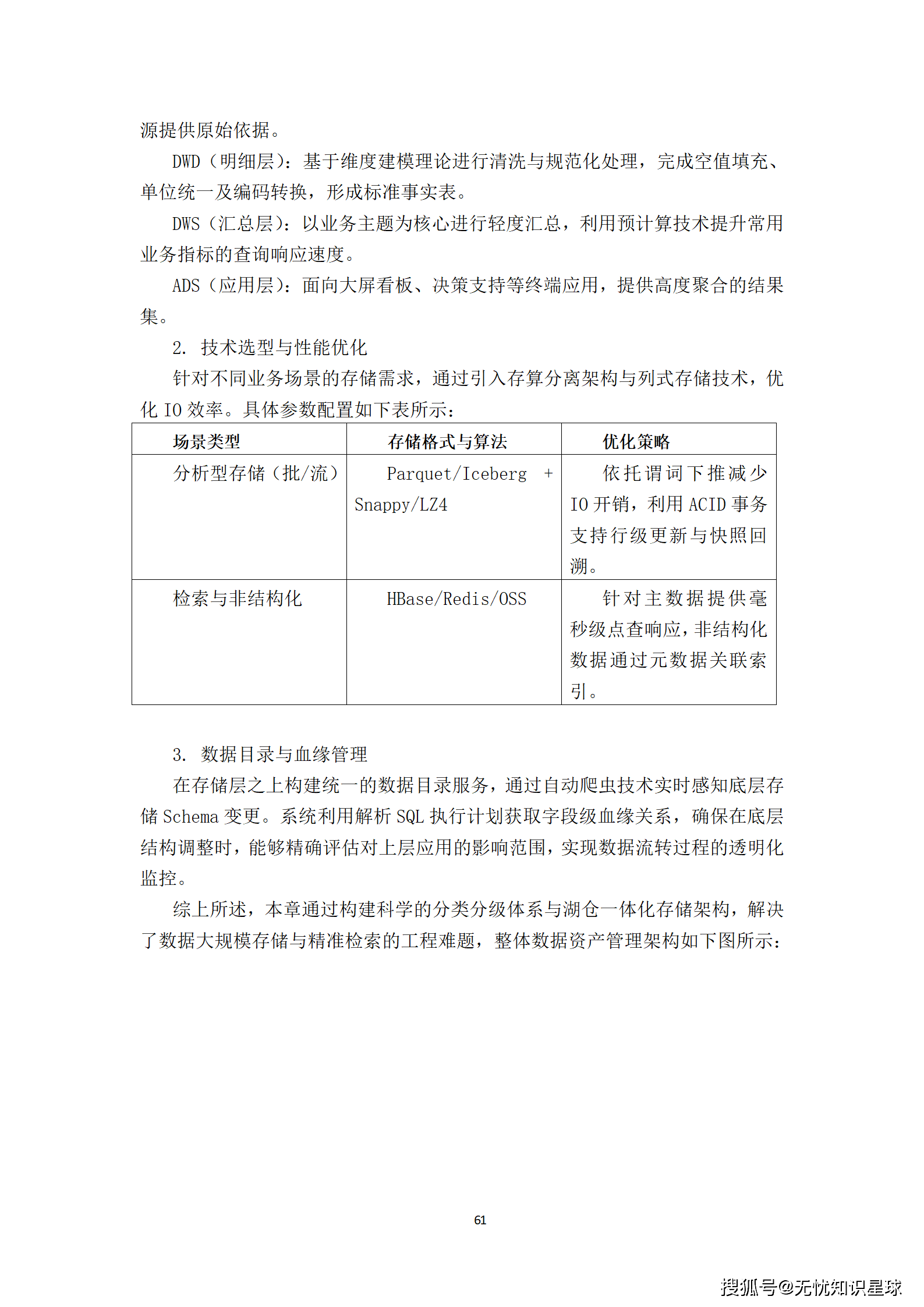
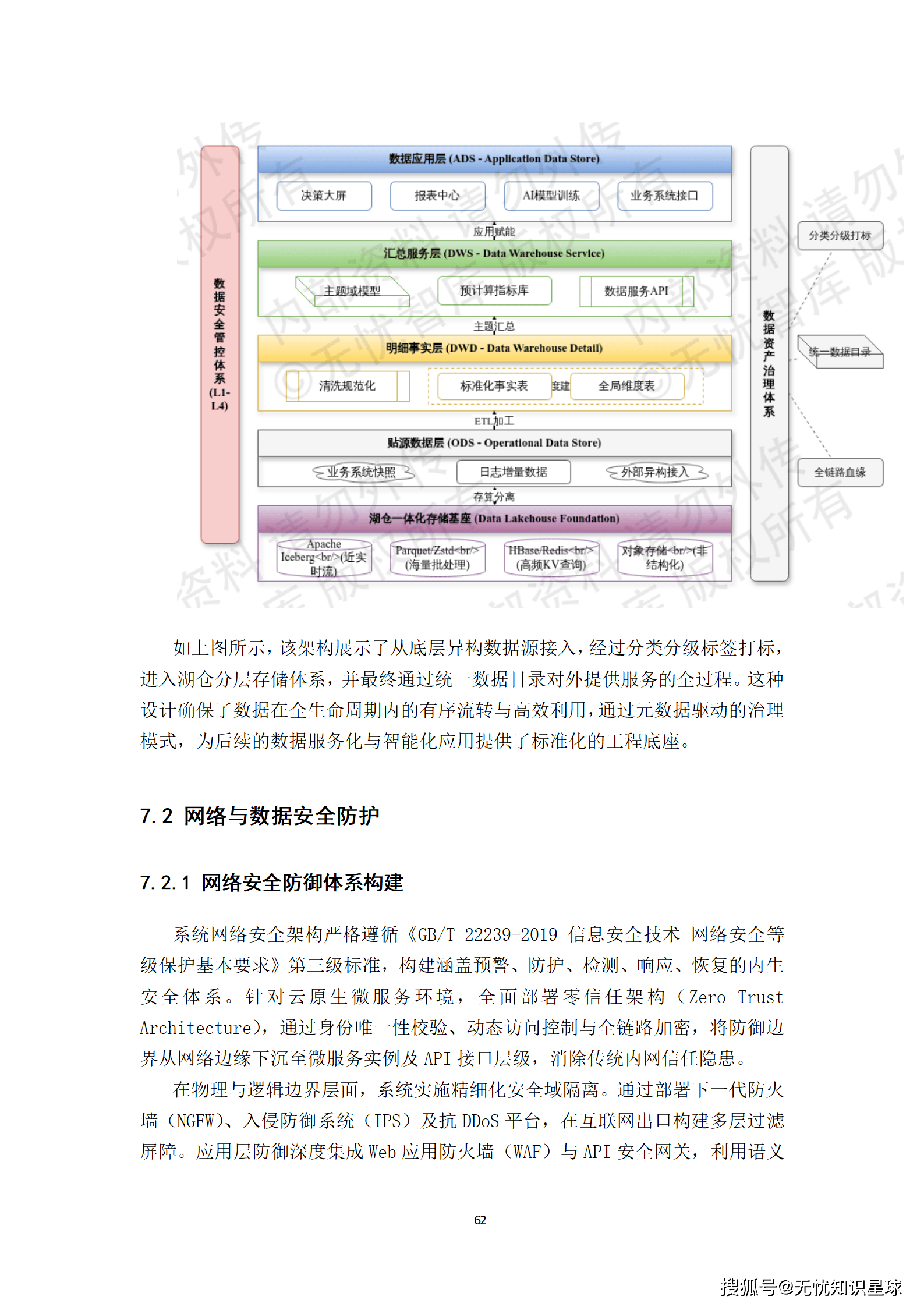
系统实施分类分级治理,将数据划分为基础主数据、业务交易数据、观测分析数据和系统元数据。底层基于 Iceberg + Parquet 格式,支持 ACID 事务与快照回溯。
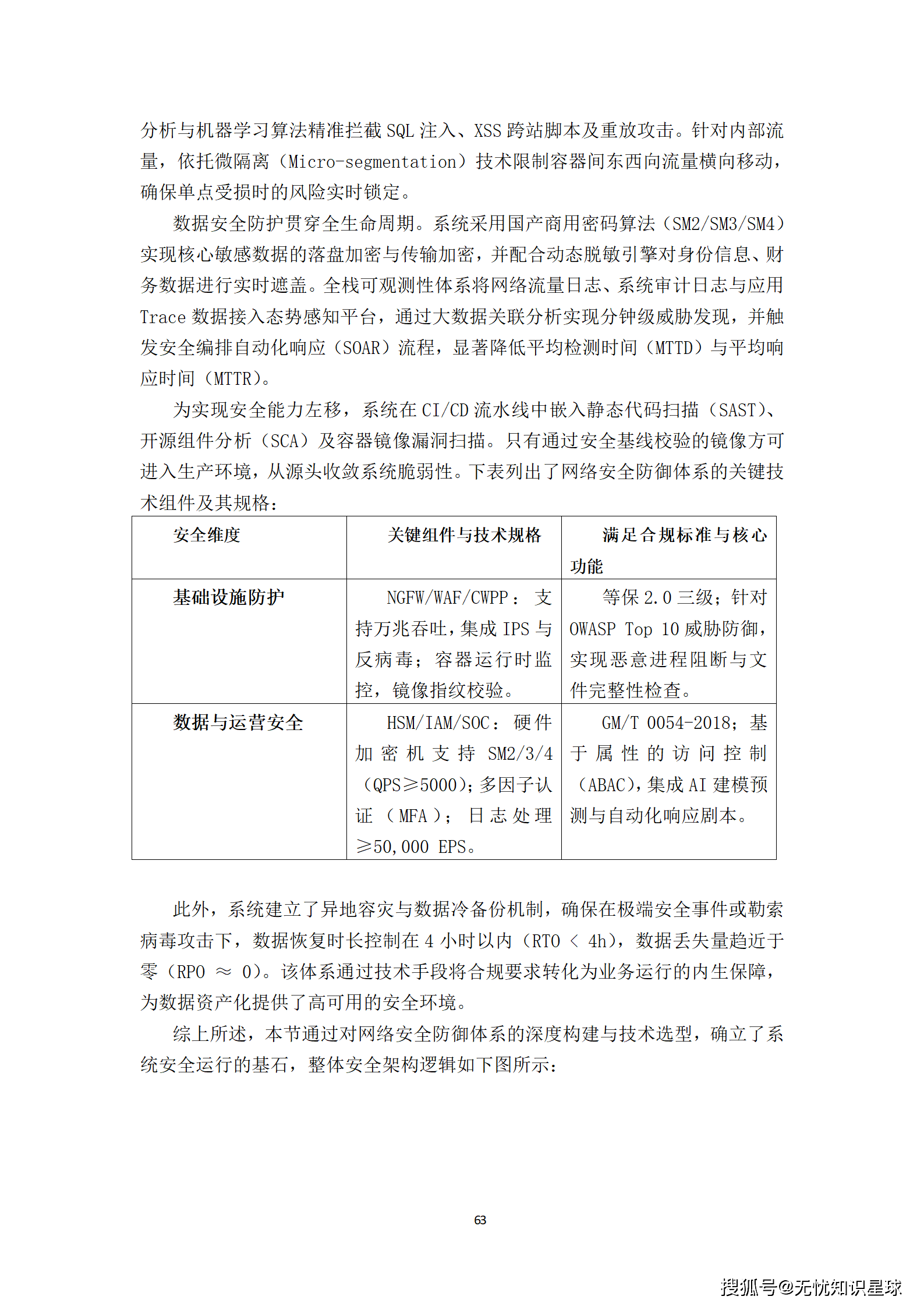
遵循等保三级标准,全面部署零信任架构(Zero Trust)。核心敏感数据采用国产商用密码(SM2/SM3/SM4)进行落盘加密,并配合态势感知平台实现分钟级的威胁发现。
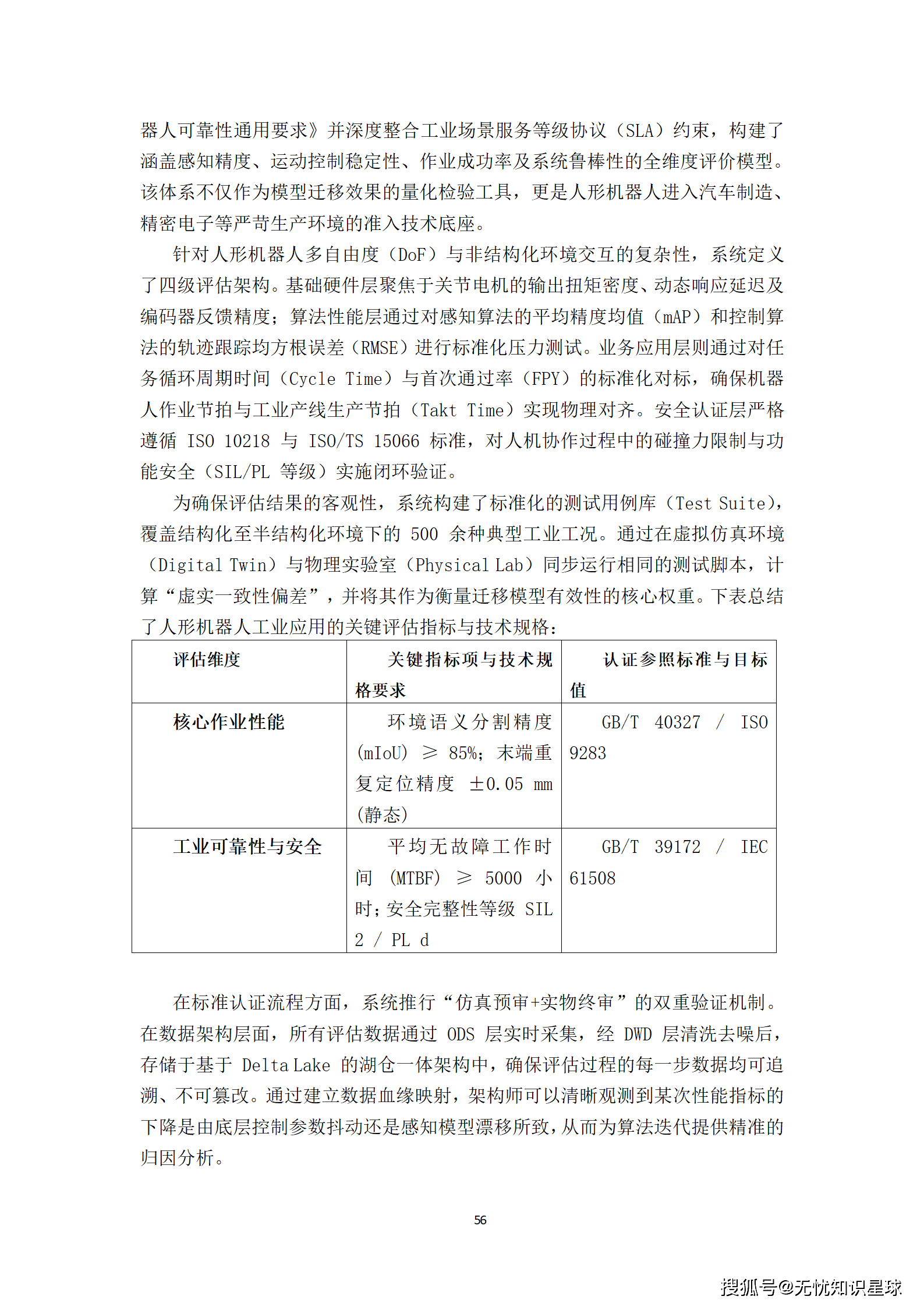
项目执行采用**“分阶段、分批次、金丝雀发布”**的路线。
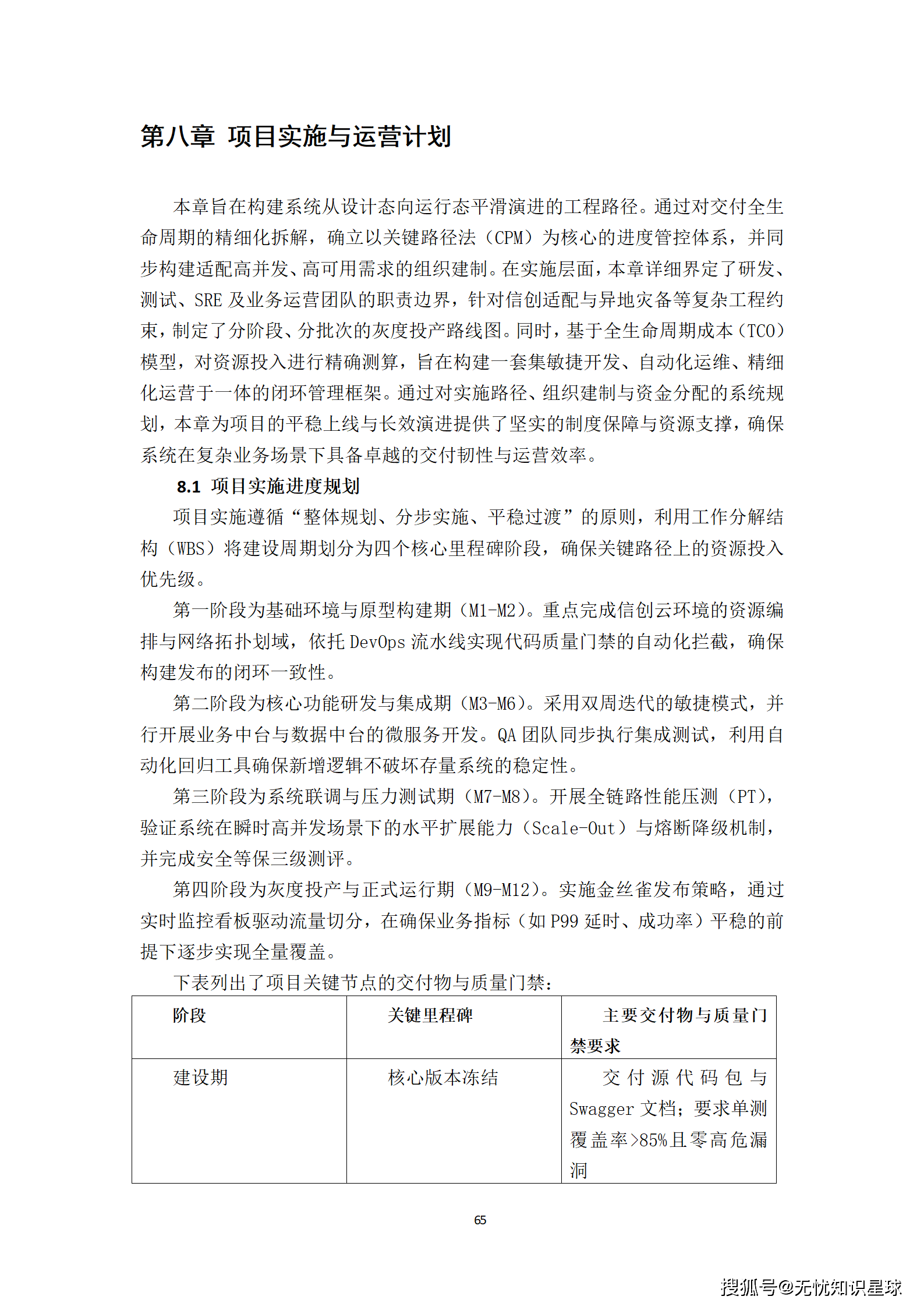
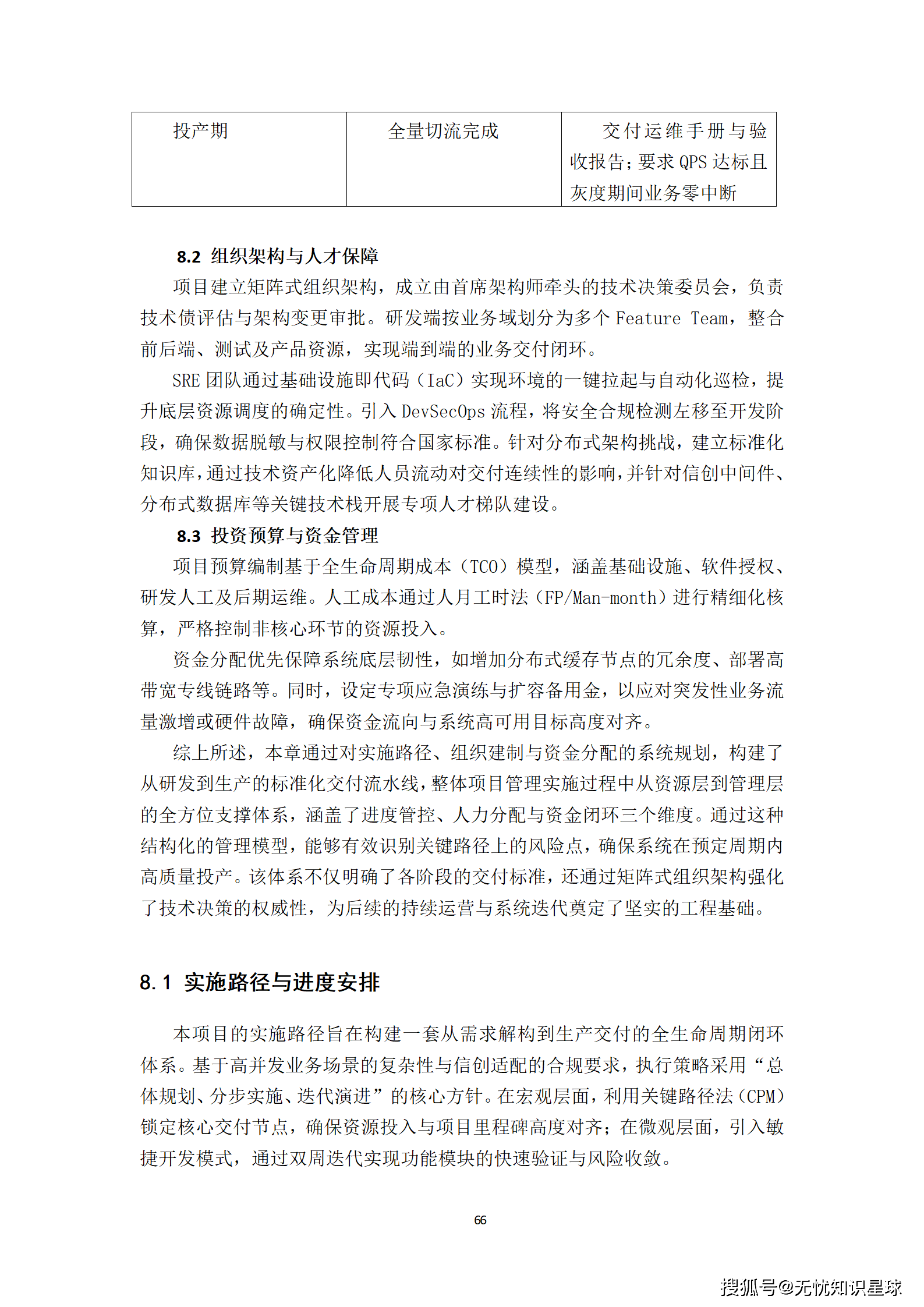
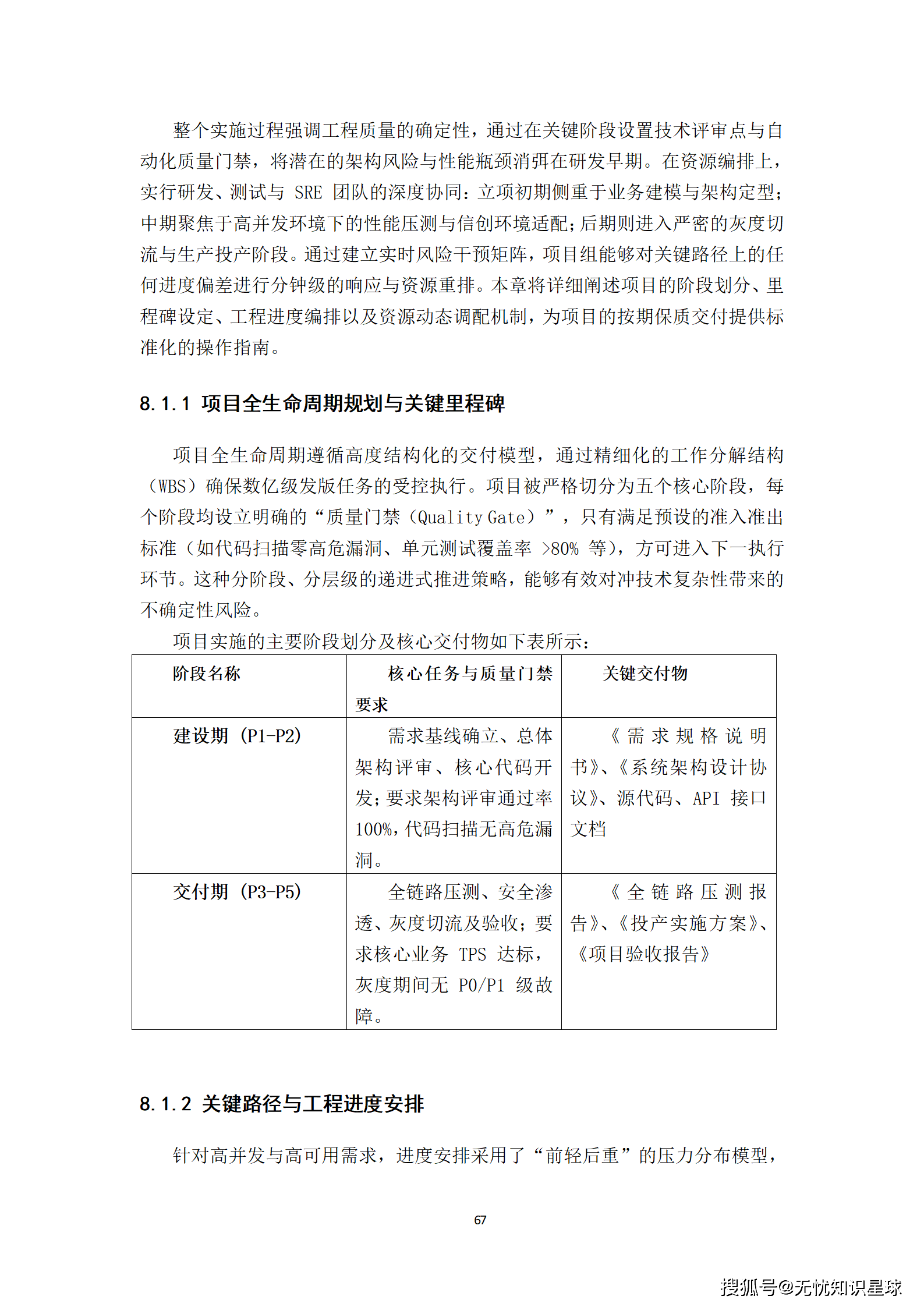
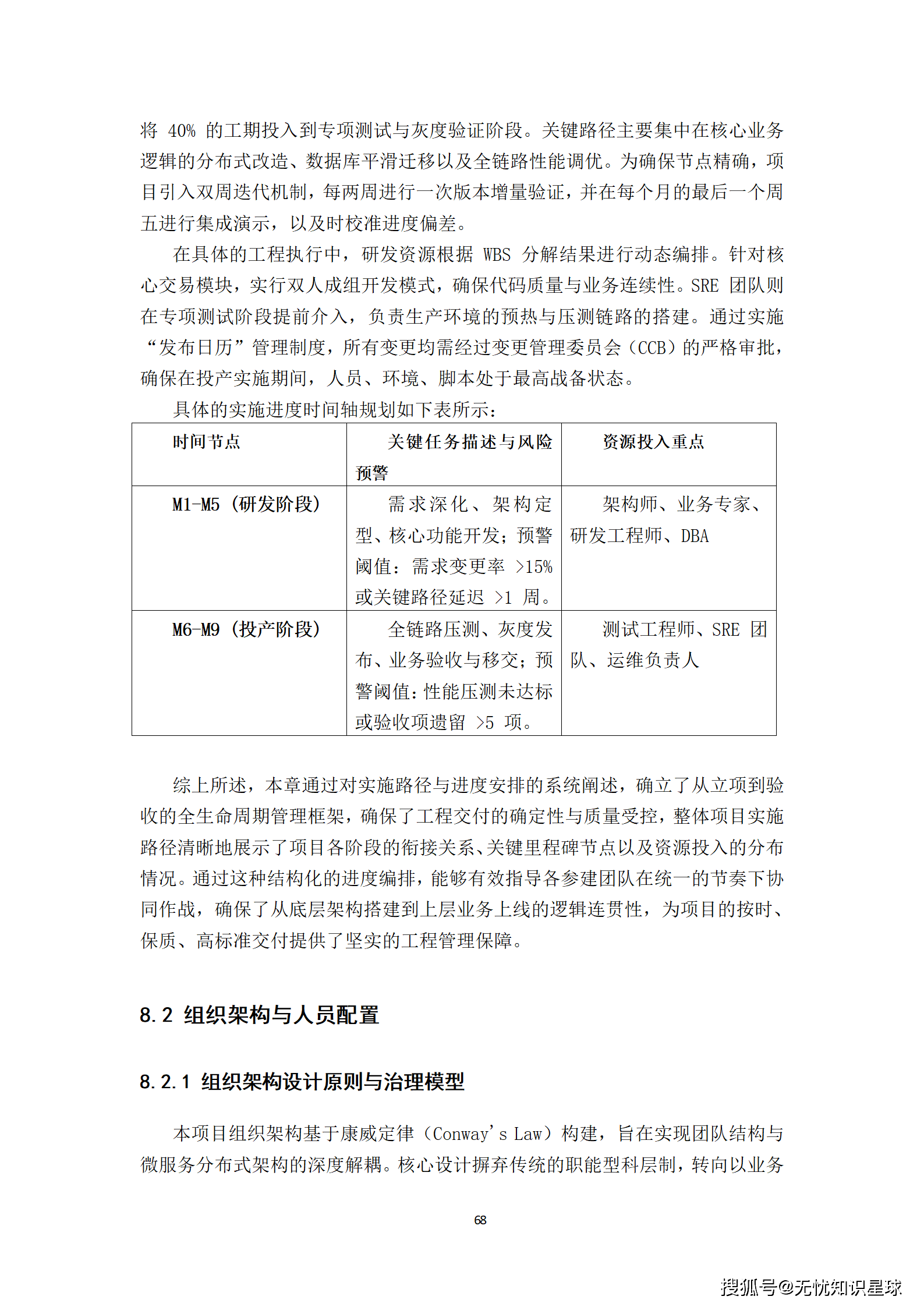
- 进度管控:将建设周期划分为基础环境构建、核心功能研发、全链路压测和灰度投产四个里程碑。
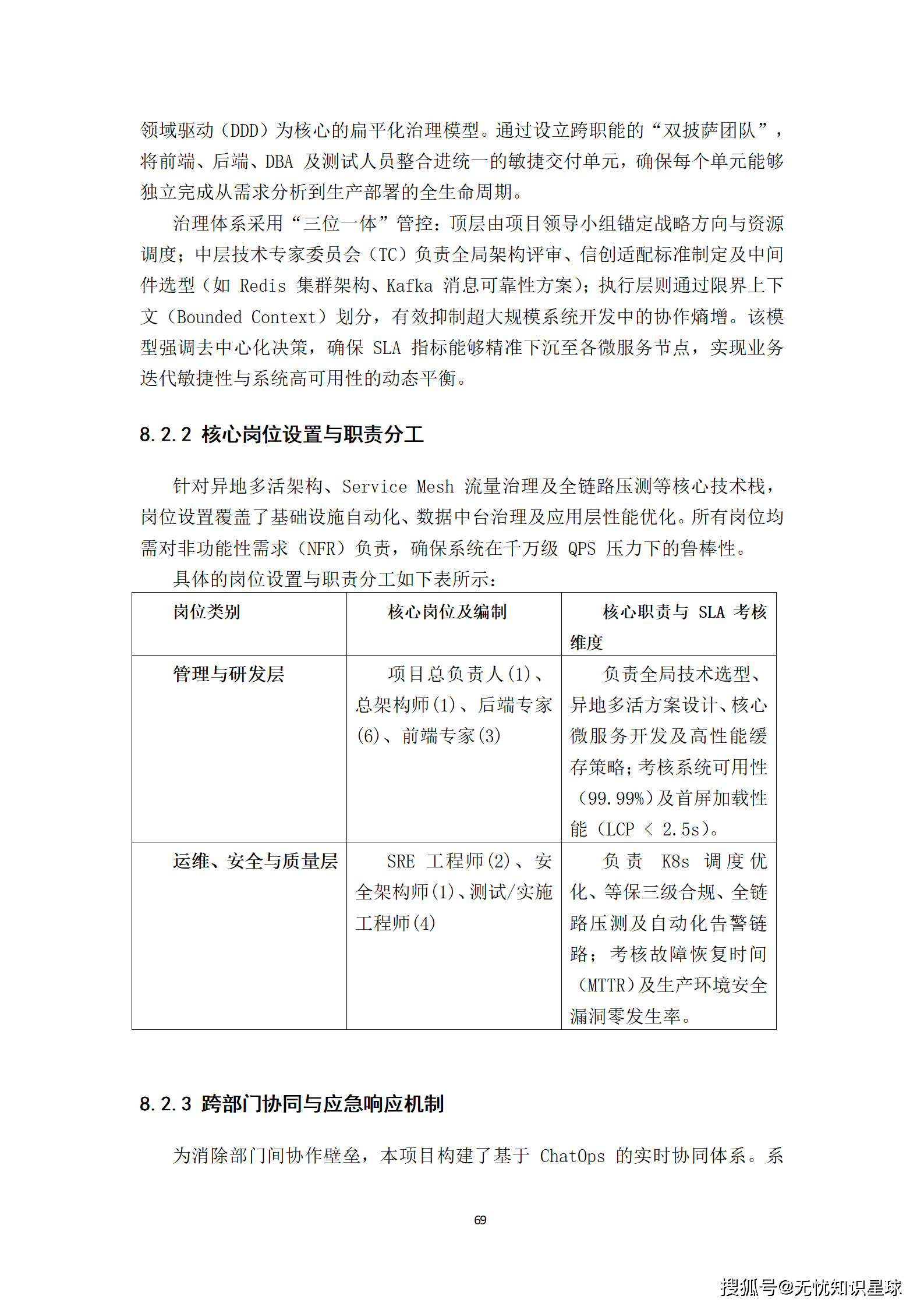
- 人才配置:组建以首席架构师为核心的“双披萨团队”,整合研发、SRE 和安全专家,确保 SLA 达标(99.99%)。
- 投资规划:直接建设成本占比 84%,重点投入计算/存储硬件及核心业务逻辑开发。
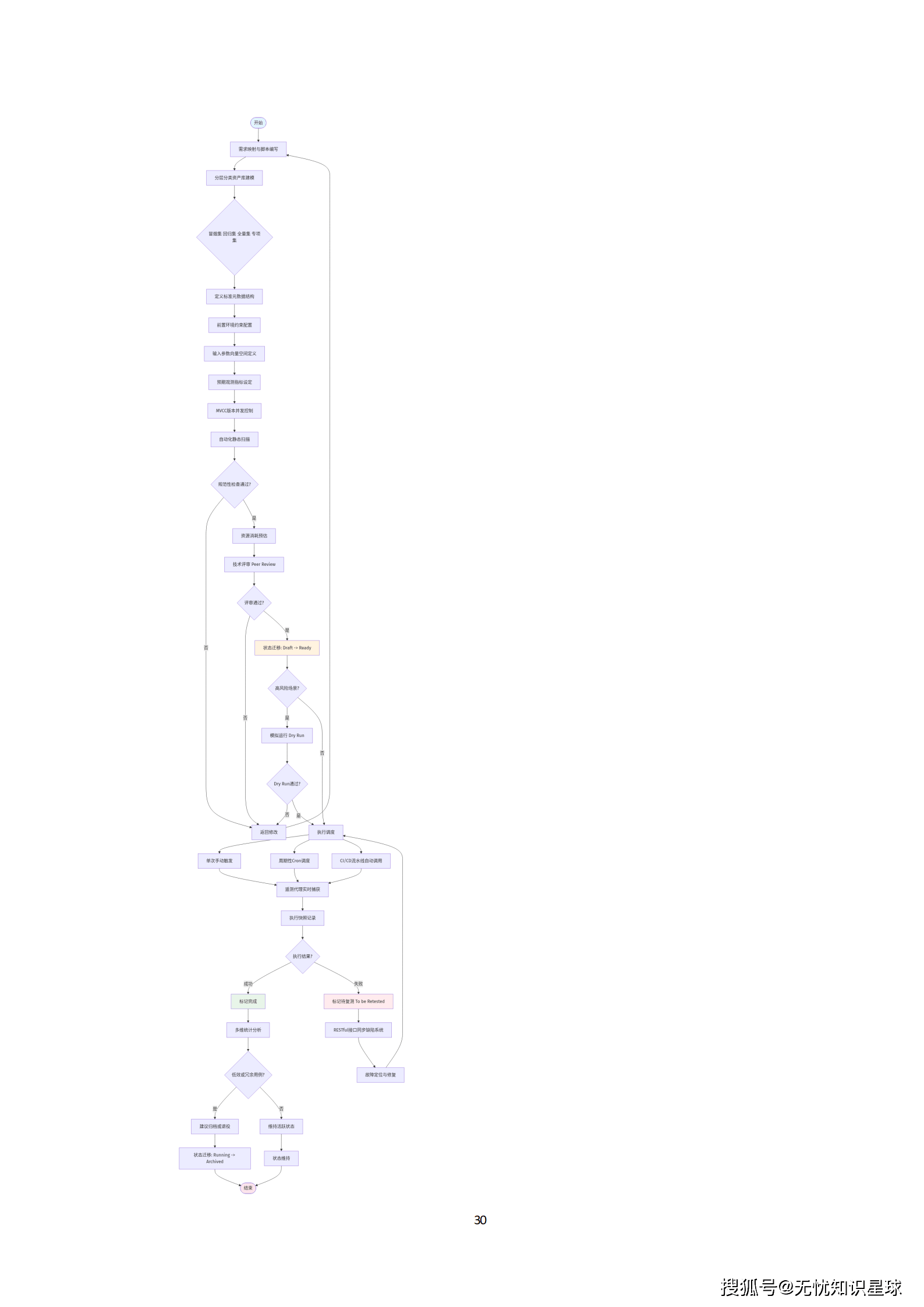
建设“具身智能人形机器人复杂工业场景应用测试场”,其意义远超单纯的硬件测试。它本质上是在为未来的**“通用工业智能”**构建一套底层的协议与度量衡。
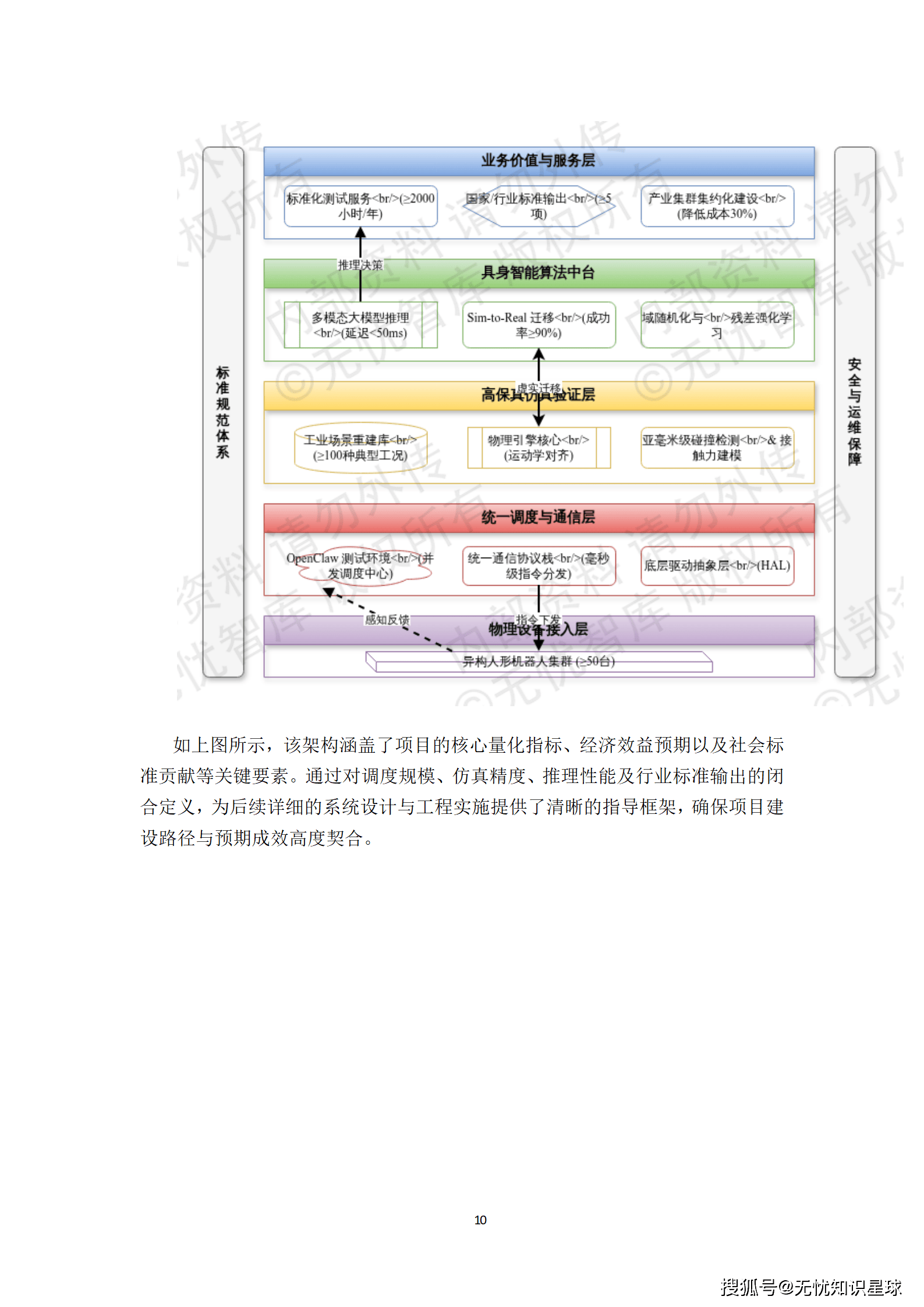
随着支持 ≥50 台异构机器人并发调度的 OpenClaw 环境建成,以及虚实迁移成功率提升至 90% 以上,我们正在见证人形机器人从“昂贵的玩具”转型为“可靠的劳动力”。这不仅将带动区域智能制造产业链的整体跃迁,更为我国在全球具身智能竞争中抢占了标准制定的先机。



小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐


 20
20 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

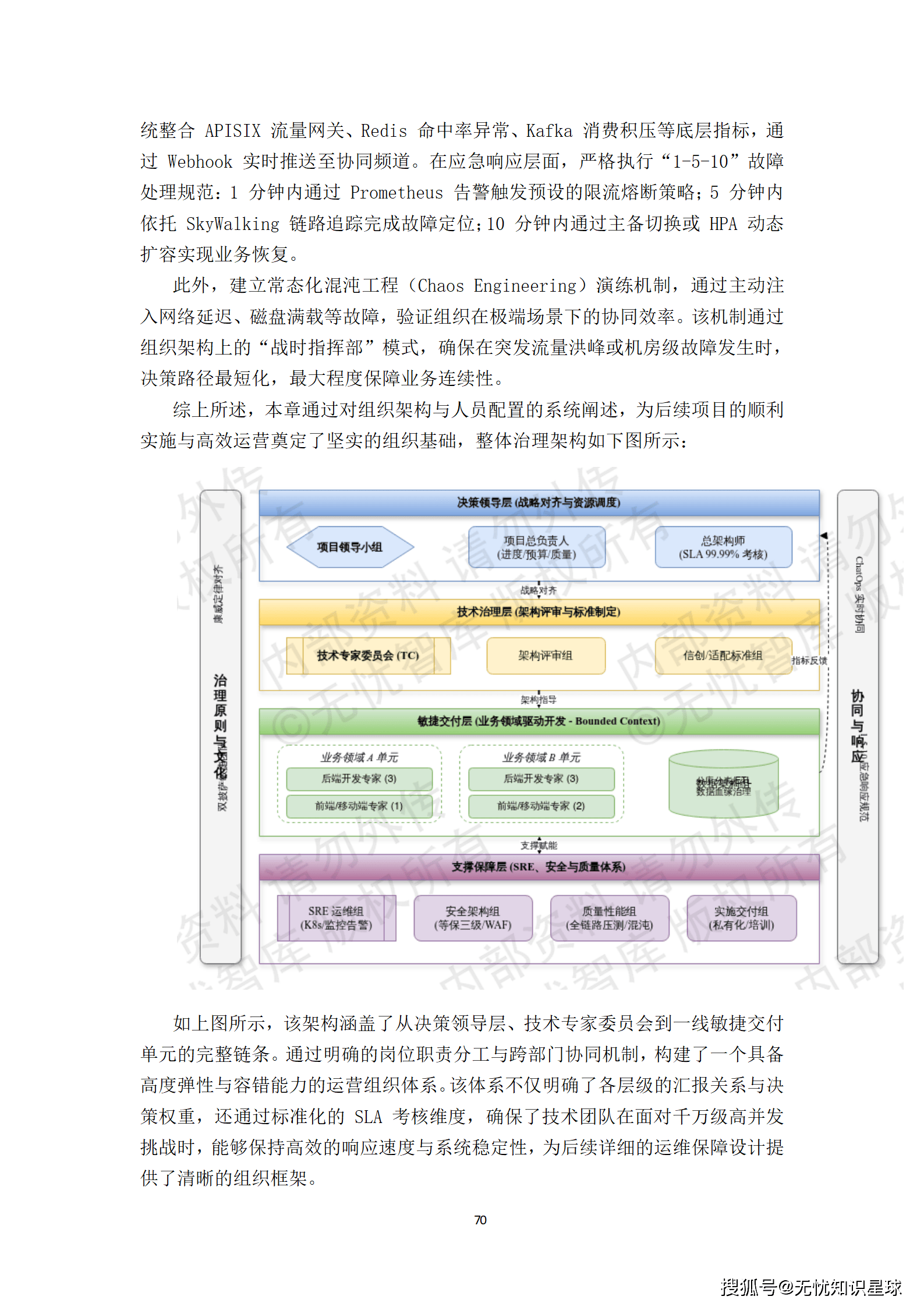
所有评论(0)