

该系列文章为 OpenCV+Python Tutorials的学习笔记
代码托管在Github
转载请注明: http://blog.csdn.net/a352611/article/details/51417779 [三记的博客]
写在文章开始之前:
关于几何变换,常见的资料都没有把数学原理部分讲透彻,基本都是照着课本说,导致我很多地方无法彻底理解.思前想后还是把这一块分成两个部分,一部分专门讲数学,一部分专门讲应用.本文为数学原理部分。
Geometry Transformation 几何变换
对图像的几何变换本质上是一种线性变换,其数学本质为
Inew=TIold
即通过变换矩阵T将原图上的点的位置Iold变换到新的位置,从而得到新的图像Inew
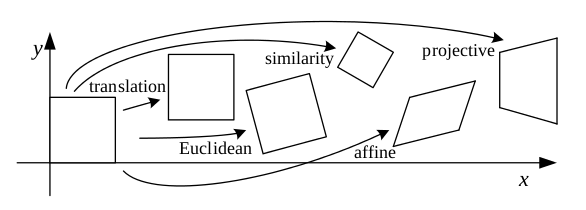
2D平面变换示意图(”Computer Vision: Algorithms and Applications”, Richard Szeliski)
- Translation 平移
- Euclidean(rigid, rotation) 旋转
- Scale 缩放;图中没有画出
- Similarity 相似变换;结合旋转,平移和缩放
- Affine 仿射变换;想象在similarity的基础上用两只手对图像进行按压拉伸
- Projective 投影变换;想象投影仪做的事情,将一个面投影到另外一个面的情况
Homogeneous coordinates 齐次坐标
简单的说法就是对于点P=[x;y]T我们无从得知这是一个点还是向量,之所以纠结这个概念的原因在于:平移对于向量没有意义,但对点有意义。我们希望对线性变换有一个统一的描述,结果发现在Homogeneous coordinates齐次坐标下我们能够和谐统一地描述这些。怎么把一个点转换到齐次坐标下来描述呢?很简单的一个方法是
直接将点P=[x;y]T变为P=[x;y;1]T
而向量P=[x;y]T变为P=[x;y;0]T
由于我们的变换矩阵是一个3x3的矩阵,最后一列的意义就是平移,这样就实现平移对向量无效,也能让线性变换统一写为Pnew=TPoldT为变换矩阵,最后还要从齐次坐标转换回我们的欧几里得坐标。
完整的Homogeneous coordinates概念请翻阅”Multiple View Geometry in computer vision”, Richard Hartley and Andrew Zisserman
平行线相交于一点
Scaling,Rotation,Translation 缩放、旋转、平移
缩放 Scaling
fx,fy分别为x方向和y方向的缩放系数
旋转 Rotation
平移 Translation
只有齐次坐标系下的表示
tx,ty分别为x方向和y方向的平移距离
Affine 仿射变换
Perspective 投影变换






 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)