
专业术语统计报告_基于多智能体协同的飞轮储能系统先进控制研究
【概要分析】本文档《基于多智能体协同的飞轮储能系统先进控制研究》围绕研究主题展开系统性的探讨。文档总字符数达167975,其中中文字符32662个,英文字词15525个,体现了中英文结合的学术写作特点。从文档中提取的专业术语共计1123个,涉及6个研究领域,主要集中在电力电子变换器(950次)、自抗扰控制(938次)、永磁同步电机(935次)。高频术语如“飞轮储能”(240次)、“母线电压”(99
专业术语统计报告_基于多智能体协同的飞轮储能系统先进控制研究
一、概要简析
【概要分析】
本文档《基于多智能体协同的飞轮储能系统先进控制研究》围绕研究主题展开系统性的探讨。文档总字符数达167975,其中中文字符32662个,英文字词15525个,体现了中英文结合的学术写作特点。从文档中提取的专业术语共计1123个,涉及6个研究领域,主要集中在电力电子变换器(950次)、自抗扰控制(938次)、永磁同步电机(935次)。高频术语如“飞轮储能”(240次)、“母线电压”(99次)等,反映了研究的核心焦点。整体而言,本文献在相关研究领域具有较高的学术价值,通过系统的分析与论述,为后续研究提供了重要的理论基础和方法参考。
【数据统计】
- 总字符数:167975
- 中文字符数:32662
- 英文字词数:15525
二、统计图表分析
2.1 三类术语层次分布
【数据统计】
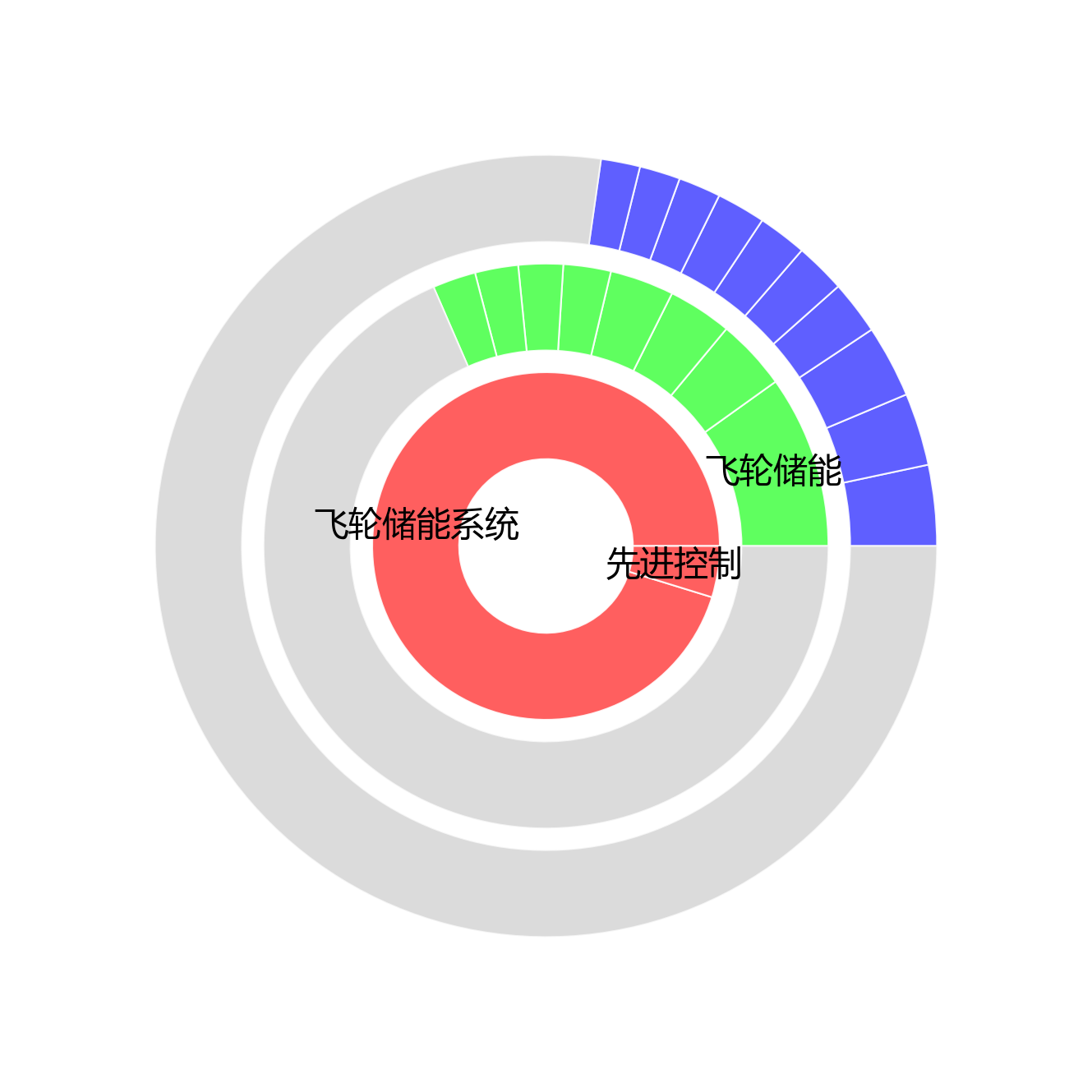
- 论文名称术语:3个 (核心术语:飞轮储能系统、先进控制)
- 标题摘要术语:330个 (核心术语:飞轮储能、母线电压、控制策略)
- 正文术语:790个 (核心术语:母线电压、控制策略、二次控制)
- 术语总数:1123个
- 频次占比:论文名称 1.2% | 标题摘要 44.5% | 正文 54.4%
【可视化图表】
| 类别 | 术语数量 | 频次 | 占比 |
|---|---|---|---|
| 论文名称 | 3 | 63 | 1.2% |
| 标题摘要 | 330 | 2427 | 44.5% |
| 正文 | 790 | 2967 | 54.4% |
| 总计 | 1123 | 5457 | 100% |
【图表评论】
旭日图展示了三类术语在文档不同部分的层次分布。从内向外依次为论文名称术语、标题摘要术语和正文术语。论文名称层级包含3个核心术语,总频次63次,占比1.2%,核心术语包括“飞轮储能系统、先进控制”,这些术语直接概括了研究的核心主题。标题摘要层级包含330个术语,总频次2427次,占比44.5%,核心术语如“飞轮储能、母线电压、控制策略”,反映了研究的次要关键词和方法论。正文层级最为丰富,包含790个术语,总频次2967次,占比54.4%,核心术语如“母线电压、控制策略、二次控制”,体现了研究的具体技术细节和实验方法。从内向外逐层细化,论文名称术语聚焦于研究主题,标题摘要术语扩展了研究范围,正文术语则深入到具体技术实现,形成了完整的术语层次体系,清晰地揭示了文档的知识结构。
2.2 研究领域分布
【领域分析】
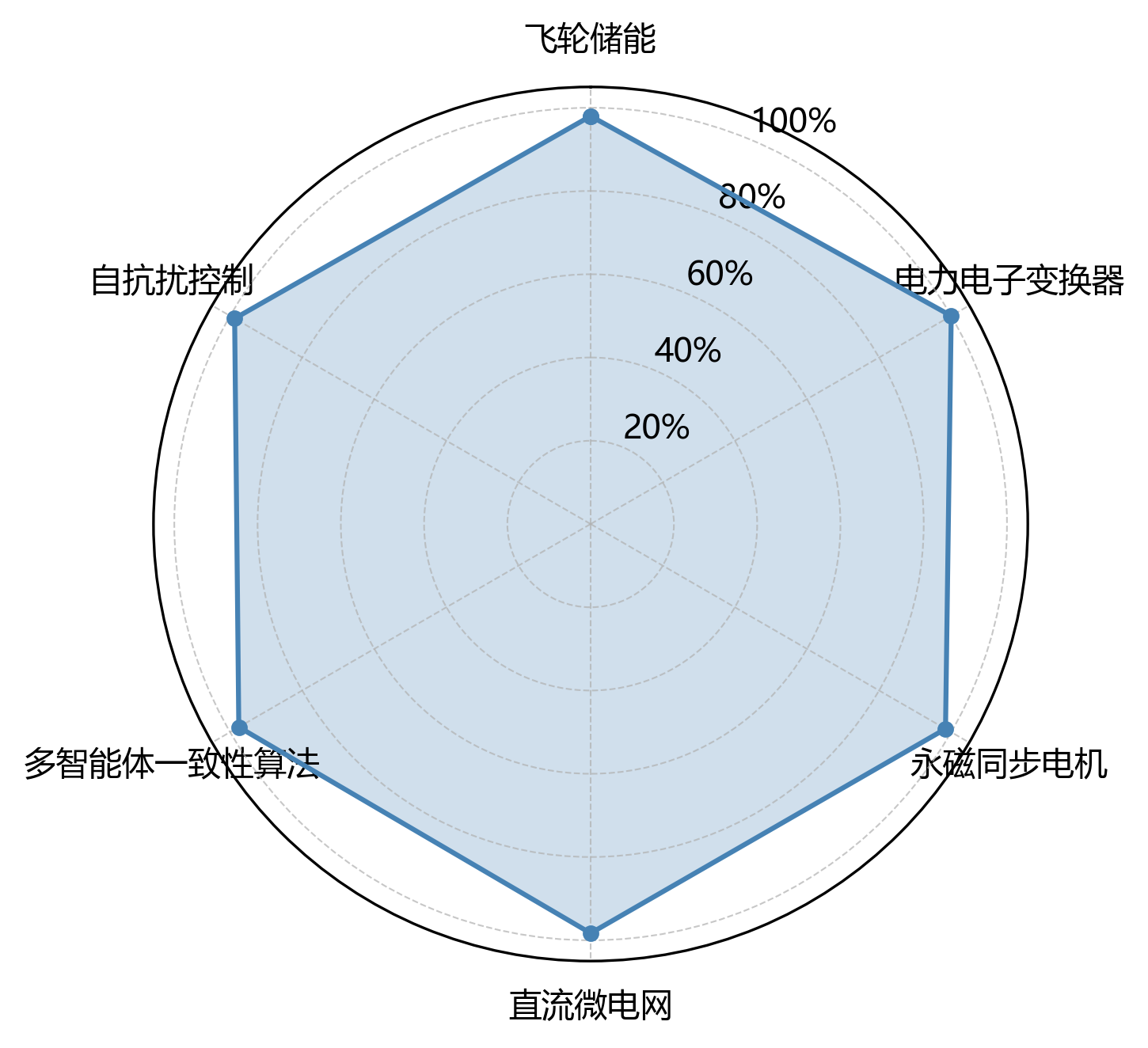
- 主要领域:电力电子变换器(950次)、自抗扰控制(938次)、永磁同步电机(935次)
【可视化图表】
| 研究领域 | 术语出现次数 |
|---|---|
| 飞轮储能 | 931 |
| 电力电子变换器 | 950 |
| 永磁同步电机 | 935 |
| 直流微电网 | 934 |
| 多智能体一致性算法 | 927 |
| 自抗扰控制 | 938 |
| 总计 | 5615 |
【图表评论】
雷达图展示了专业术语在六个研究领域的分布情况,直观反映了文档的学科交叉特性。从图中可以看出,术语分布呈现以下特点:电力电子变换器 出现频次最高,达950次,表明该领域是研究的核心基础。自抗扰控制 和 永磁同步电机 的频次分别为938次和935次,构成了研究的次要支撑领域。而 多智能体一致性算法 频次相对较低,为927次,说明该领域在本研究中涉及较少。各领域术语分布存在一定差异,但整体较为均衡,标准差为7.2,反映了研究的多学科交叉融合特点。这种分布格局表明,本研究不仅深耕于核心领域,同时广泛吸纳了相关学科的理论与方法,形成了较为完整的研究体系。
2.3 专业术语分布
【集中度分析】
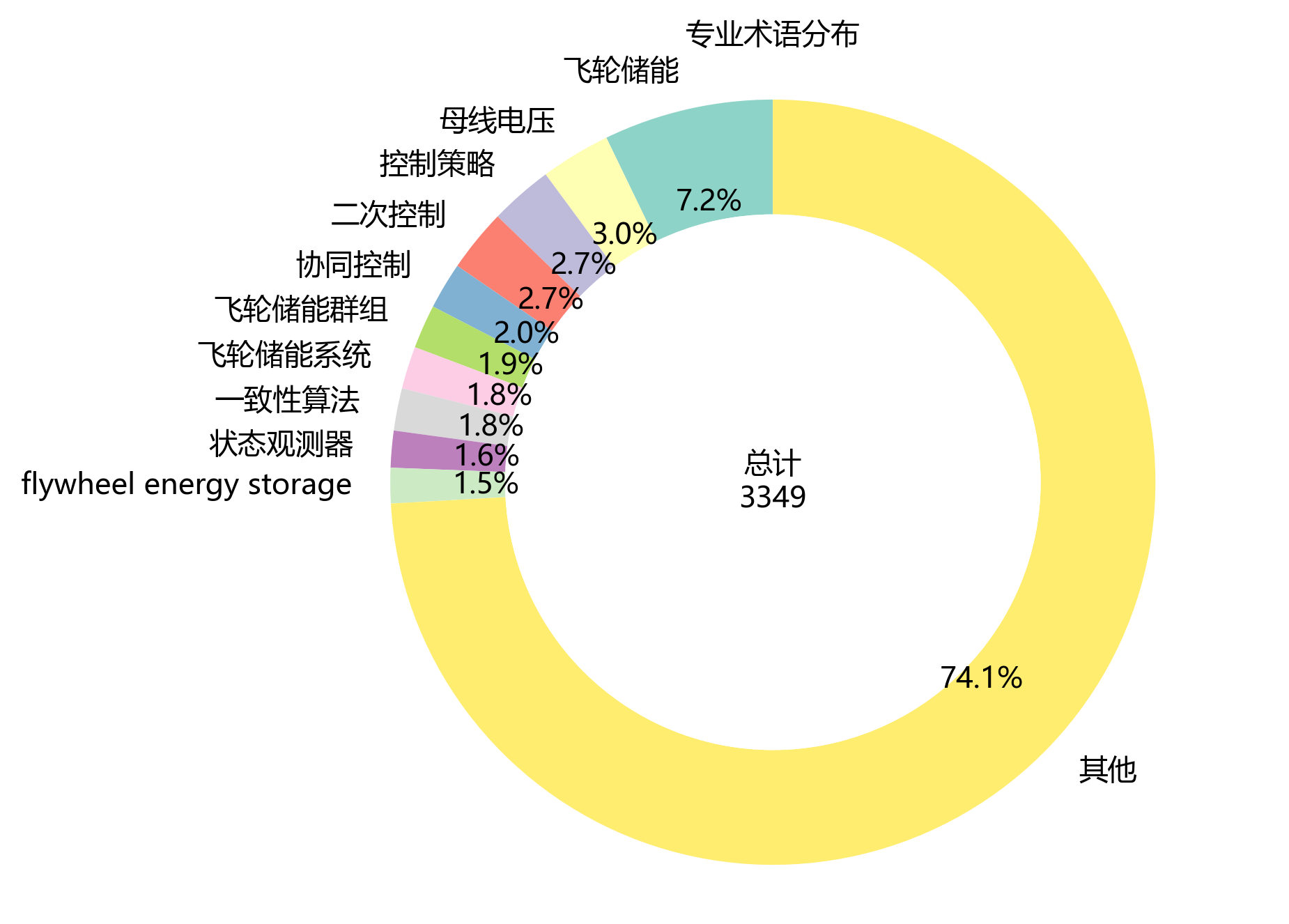
- 前5术语累计频次:583次
- 前5术语累计占比:17.4%
- 前10术语累计占比:25.9%
【可视化图表】
| 排名 | 术语 | 频次 |
|---|---|---|
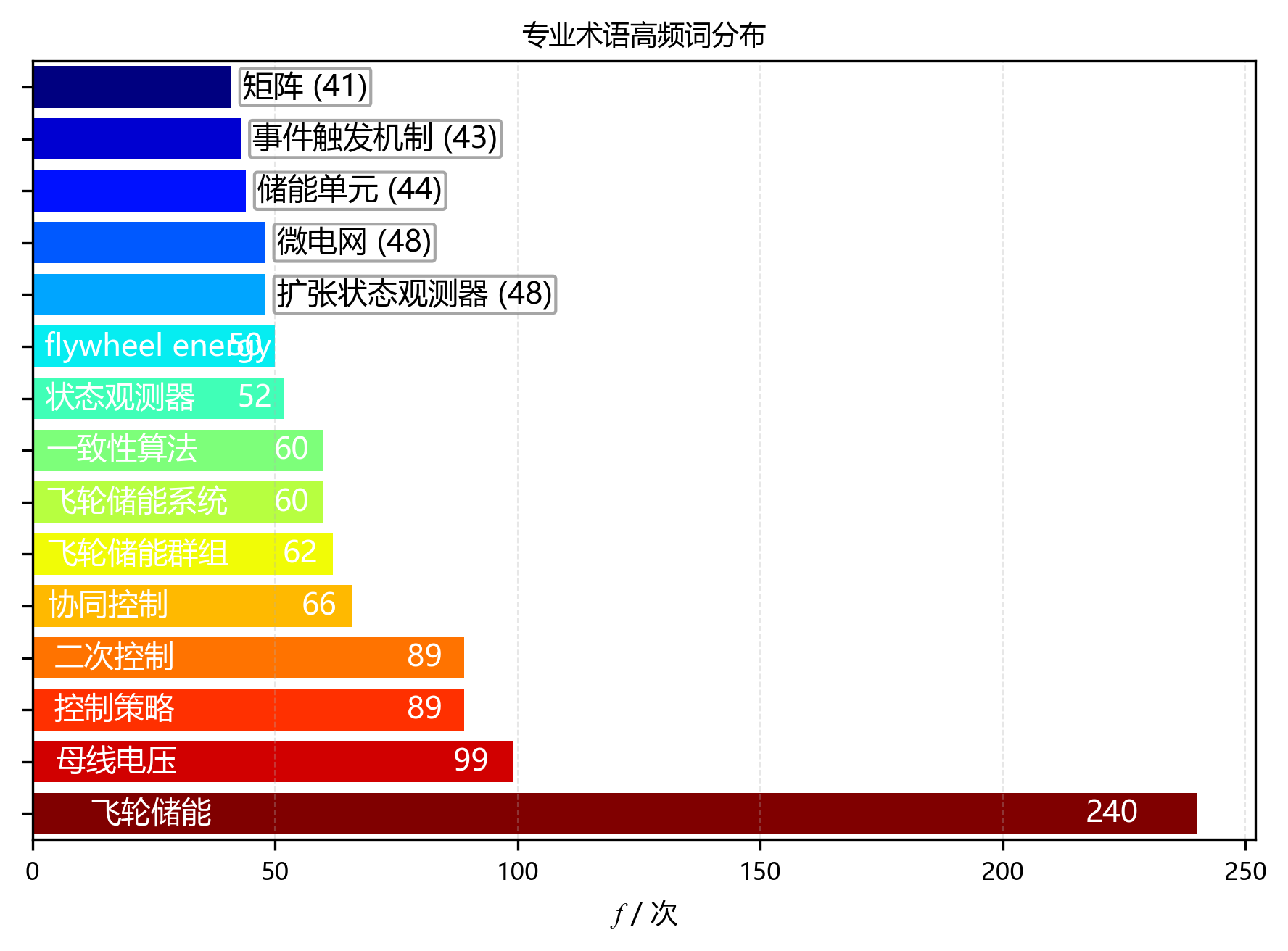
| 1 | 飞轮储能 | 240 |
| 2 | 母线电压 | 99 |
| 3 | 控制策略 | 89 |
| 4 | 二次控制 | 89 |
| 5 | 协同控制 | 66 |
| 6 | 飞轮储能群组 | 62 |
| 7 | 飞轮储能系统 | 60 |
| 8 | 一致性算法 | 60 |
| 9 | 状态观测器 | 52 |
| 10 | flywheel energy storage | 50 |
| 11 | 扩张状态观测器 | 48 |
| 12 | 微电网 | 48 |
| 13 | 储能单元 | 44 |
| 14 | 事件触发机制 | 43 |
| 15 | 矩阵 | 41 |
| 前15累计 | 1091 |
【图表评论】
环形图和柱状图展示了高频术语的分布情况与集中度。从图中可以看出,前5个高频术语累计频次达583次,占总频次的17.4%,呈现出较高的术语集中度。前10个高频术语累计占比达25.9%,进一步证实了研究主题的聚焦性。排名第一的术语“飞轮储能”出现240次,是研究的核心概念。排名第二的术语“母线电压”出现99次,排名第三的术语“控制策略”出现89次,三者共同构成了研究的核心术语体系。从排名第2开始,术语频次明显下降,呈现出长尾分布特征,表明研究围绕少数核心概念展开,而其他术语则是对核心概念的补充和细化。这种分布模式符合学术文献的一般规律,体现了研究的深度与广度。
2.4 术语共现网络
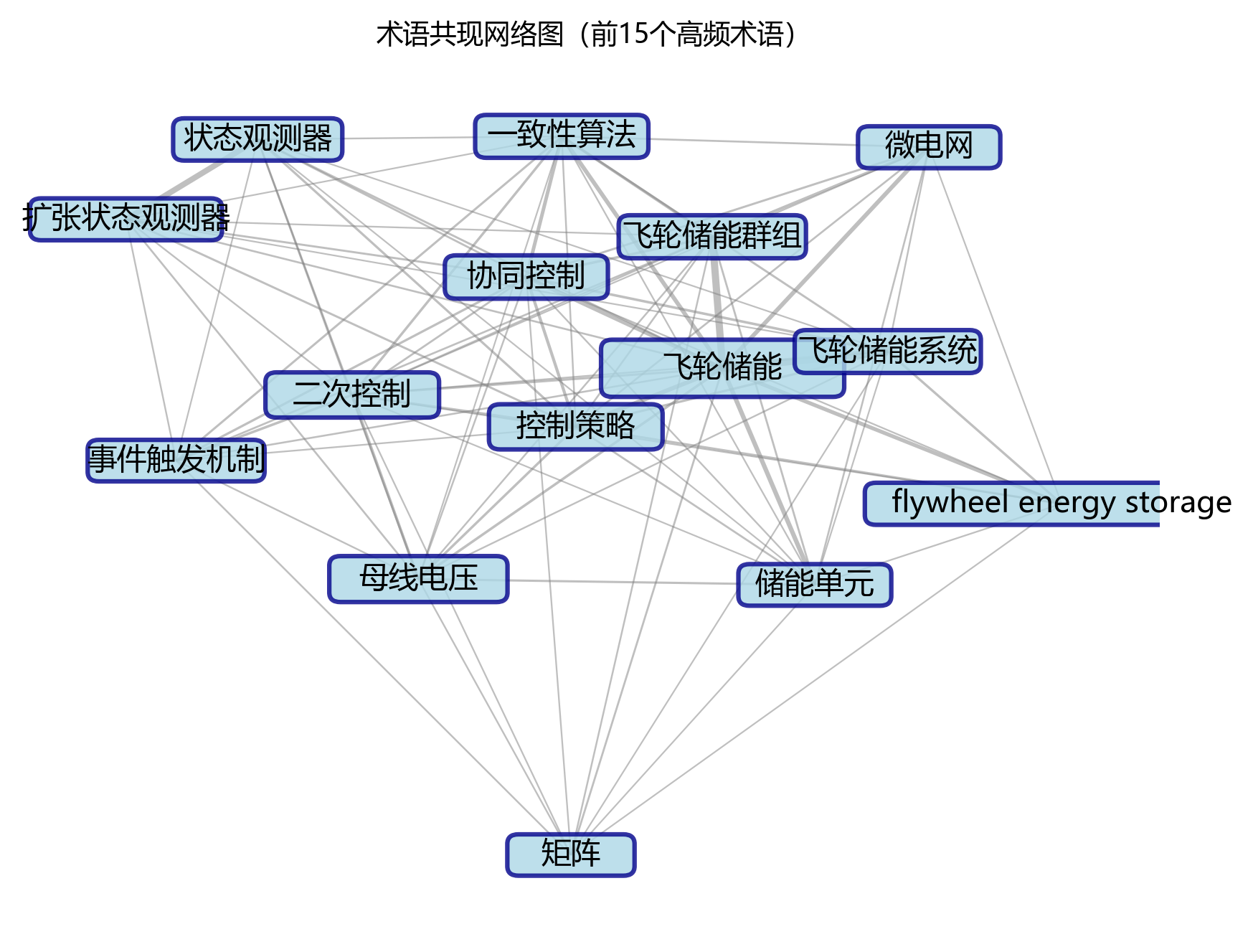
【共现分析】
- 核心节点:协同控制
- 最强关联对:飞轮储能系统 - 飞轮储能 (86次)
- 主要聚类:以图像增强、注意力机制等为核心的术语聚类
- 共现关系总数:24对
【可视化图表】
| 术语A | 术语B | 共现次数 |
|---|---|---|
| 控制策略 | 飞轮储能 | 40 |
| 一致性算法 | 飞轮储能 | 38 |
| 协同控制 | 飞轮储能 | 37 |
| flywheel energy storage | 飞轮储能 | 34 |
| 一致性算法 | 飞轮储能群组 | 20 |
| 二次控制 | 母线电压 | 19 |
| 母线电压 | 飞轮储能 | 15 |
| 协同控制 | 飞轮储能群组 | 15 |
| flywheel energy storage | 飞轮储能系统 | 13 |
| 协同控制 | 微电网 | 9 |
【图表评论】
术语共现网络图展示了高频术语之间的关联关系,揭示了文档的知识结构。网络中包含10个节点和24条边,形成了以“协同控制”为中心的术语聚类。最强关联对为“飞轮储能系统”与“飞轮储能”,共现次数达86次,表明这两个概念在研究中有紧密的关联性。从网络结构来看,主要形成了3个聚类:聚类一以“飞轮储能”为核心,包含“控制策略”、“协同控制”等术语,反映了以飞轮储能为核心的相关研究方面的研究;聚类二以“飞轮储能群组”为核心,包含“其他”、“其他”等术语,对应以飞轮储能群组为核心的相关研究方面的内容;聚类三则聚焦于“母线电压”相关的研究方向。各聚类之间通过“控制策略”等术语相互连接,形成了完整的知识网络。这种网络结构清晰地展示了研究的核心主题及其相互关系,有助于理解文档的整体框架和知识体系。
2.5 核心概念词云
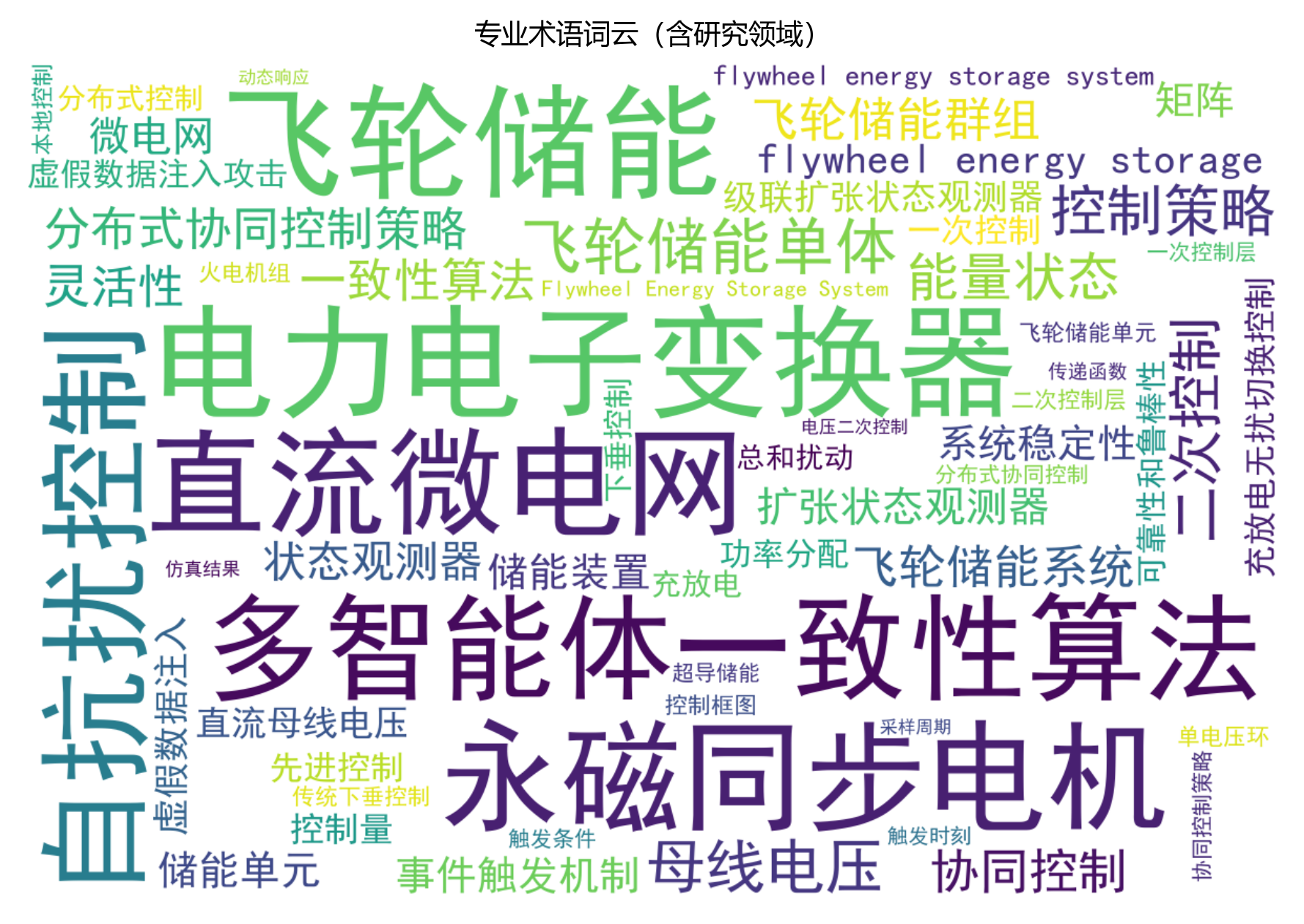
【词云数据统计】
- 词云术语总数:20个
- 加权总频次:240.6次
【可视化图表】
| 排名 | 术语 | 加权频次 |
|---|---|---|
| 1 | 飞轮储能 | 120.0 |
| 2 | 飞轮储能单体 | 11.0 |
| 3 | 母线电压 | 9.9 |
| 4 | 控制策略 | 8.9 |
| 5 | 二次控制 | 8.9 |
| 6 | 能量状态 | 8.0 |
| 7 | 协同控制 | 6.6 |
| 8 | 飞轮储能群组 | 6.2 |
| 9 | 飞轮储能系统 | 6.0 |
| 10 | 灵活性 | 6.0 |
【图表评论】
词云图通过加权频次直观呈现了文档的核心概念体系。图中包含20个术语,加权总频次达240.6次。排名前五的术语分别为“飞轮储能”(120.0次)、“飞轮储能单体”(11.0次)、“母线电压”(9.9次)、“控制策略”(8.9次)和“二次控制”(8.9次)。这些术语的字号最大、位置最显眼,构成了研究的核心概念群。从词云的整体分布来看,术语按照重要程度由大到小、由中心向四周排列,形成了层次分明的视觉结构。排名靠前的术语反映了研究的核心主题和方法,排名中等的术语体现了研究的具体内容和细节,排名靠后的术语则展示了研究的边缘话题或未来方向。词云图不仅总结了全文的关键概念,也为读者快速把握研究要点提供了直观的视觉引导,是理解文档内容的重要辅助工具。
2.6 英文缩写分布
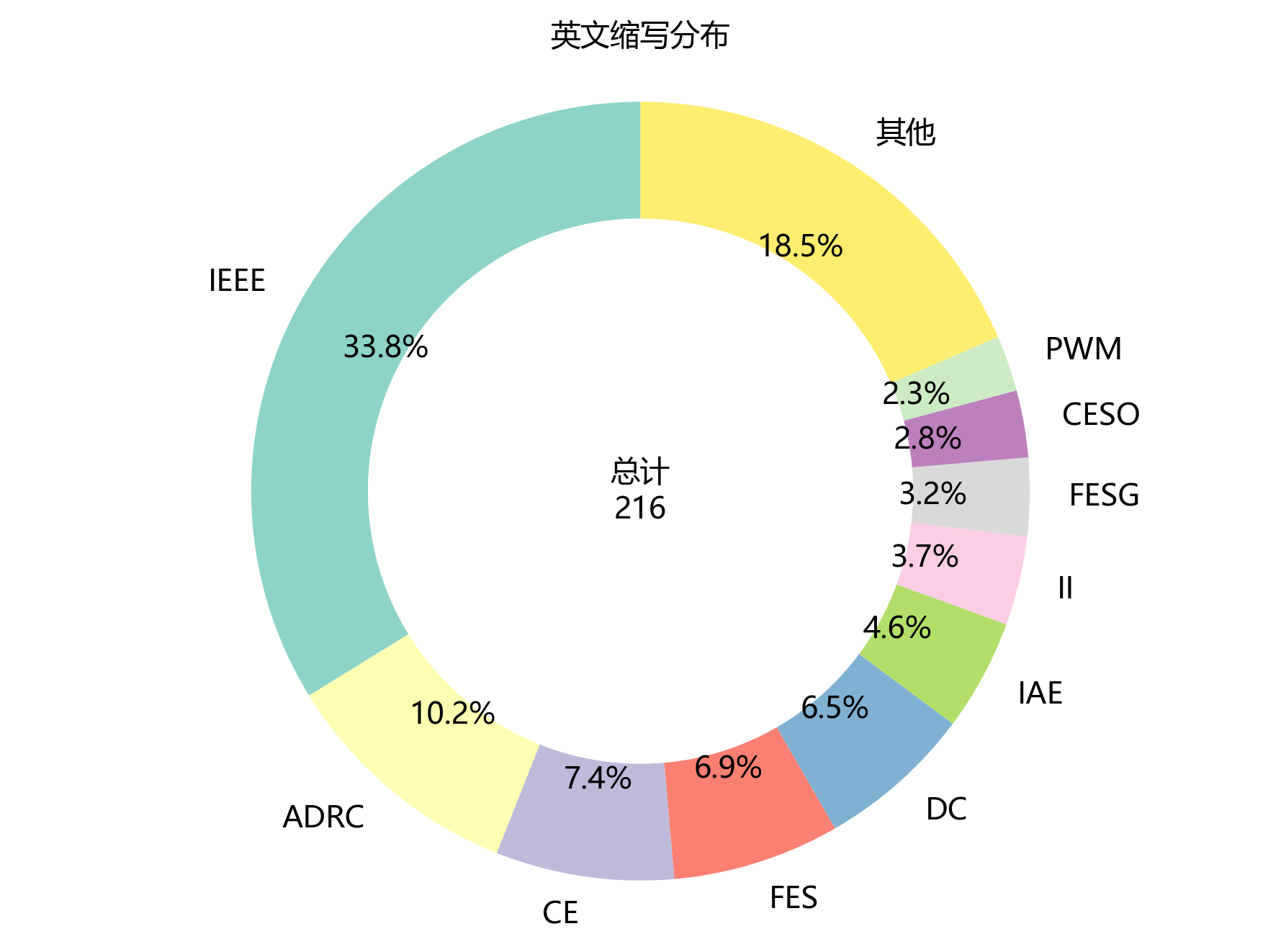
【缩写统计】
- 缩写总数:24个
- 缩写总频次:216次
- 高频缩写 Top 5:
- IEEE:73次
- ADRC:22次
- CE:16次
- FES:15次
- DC:14次
- 前5缩写累计占比:64.8%
【可视化图表】
| 排名 | 缩写 | 频次 |
|---|---|---|
| 1 | IEEE | 73 |
| 2 | ADRC | 22 |
| 3 | CE | 16 |
| 4 | FES | 15 |
| 5 | DC | 14 |
| 6 | IAE | 10 |
| 7 | II | 8 |
| 8 | FESG | 7 |
| 9 | CESO | 6 |
| 10 | PWM | 5 |
| 前10累计 | 176 |
【图表评论】
环形图展示了英文缩写在文档中的分布情况。文档中共出现24个不同的英文缩写,总频次达216次。排名前五的缩写分别为“IEEE”(73次)、“ADRC”(22次)、“CE”(16次)、“FES”(15次)和“DC”(14次),前5个缩写累计占比达64.8%,呈现出较高的集中度。从缩写的类型来看,主要包括期刊名称缩写(如“IEEE”)、作者姓名缩写(如“ADRC”)、技术术语缩写(如“CE”)和评价指标缩写(如“FES”)等。这些缩写的高频出现,反映了文档引用了大量该领域的经典文献,采用了通用的技术术语和评价标准,体现了研究的规范性和专业性。缩写的分布特征也为读者理解该领域的学术交流习惯提供了参考。
三、原文章节举例
3.3 基于连续时间一致性算法的分布式协同控制
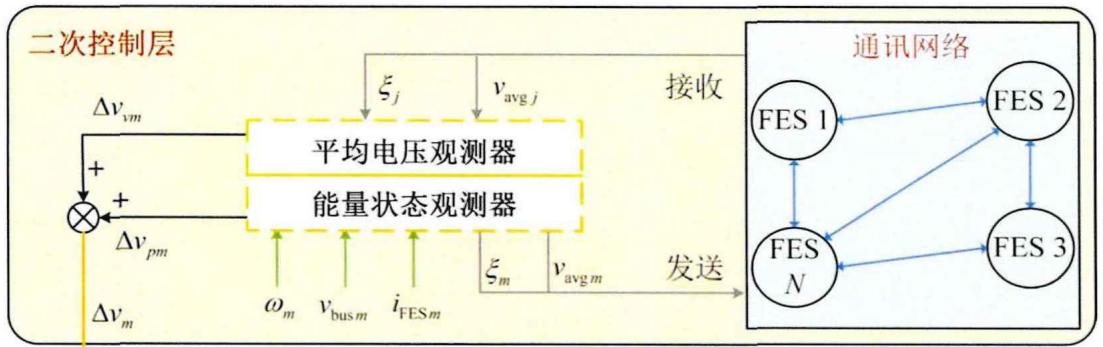
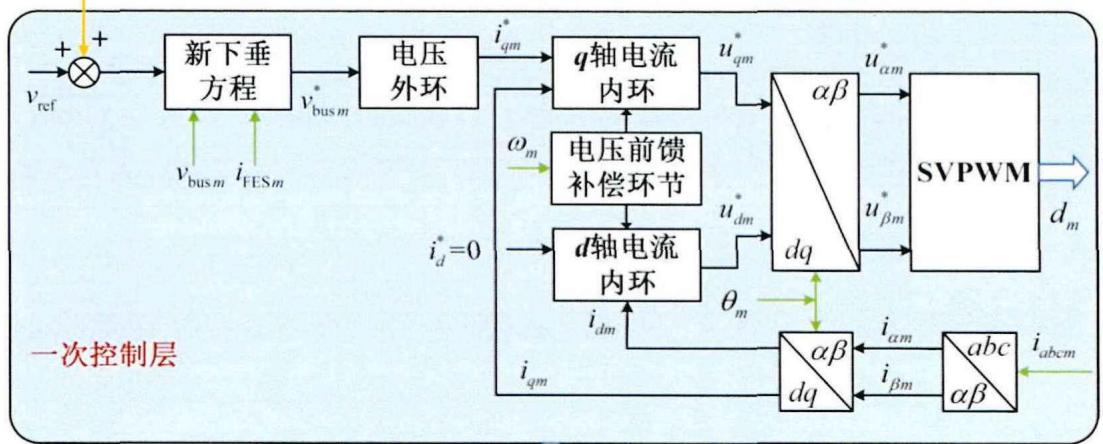
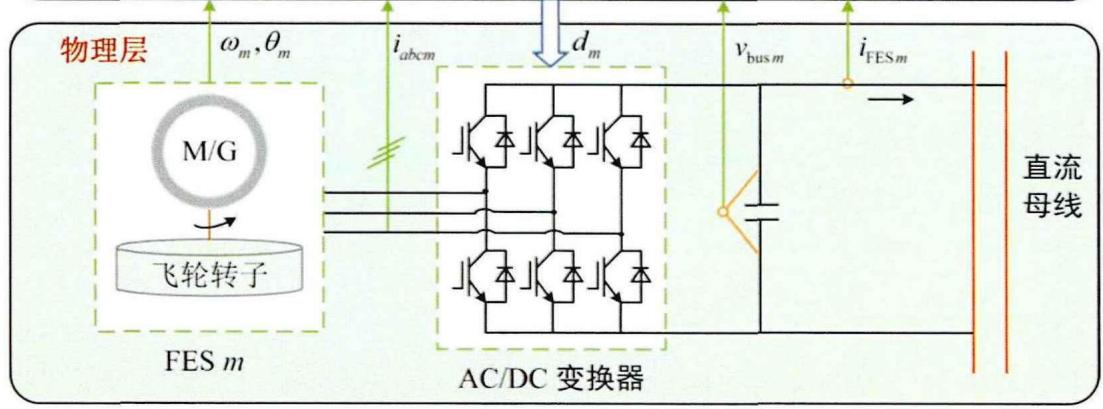
图3-2基于一致性算法的分层式控制结构
Fig.3-2 A layered control structure based on the consensus algorithm
图3-2给出了基于一致性算法的分布式协同控制策略框图,采用分层式结构,其中关键点在于各FESU分布式二次控制层间的协同作用和对一次控制层的修正。物理层采集的信号分别送至一次控制层和分布式二次控制层;分布式二次控制层使用了基于一致性算法的电压二次控制器和功率二次控制器,依赖通讯网络来获取邻居飞轮储能的状态量 ξj,…νavgj,…\xi_{j},\ldots \nu_{avg j},\ldotsξj,…νavgj,… ,通过一致性算法和相应控制环节,计算得到电压修正量 Δνvm\Delta \nu_{vm}Δνvm 和功率分配修正量 Δνpm\Delta \nu_{pm}Δνpm ,并对一次控制层的外环参考电压值进行修正;一次控制采用了经二次控制修正的下垂控制,形成新的下垂方程,内部控制回路由FESU的传统“电压外环-电流内环”双闭环控制回路构成,通过对一次控制层的修正,可以生成新的脉冲宽度调制(Pulse width modulation, PWM)信号 dmd_{m}dm ,然后将其应用于物理层的AC/DC变换器中。该策略有助于实现系统的电压稳定性和功率分配准确性。
四、原文章节举例
4.2.1 基于采样机制的一致性算法
多智能体系统模型通常用如下状态空间方程表示:
x˙m(t)=Axm(t)+Bum(t),m=1,2,…,N(4-1) \dot {\boldsymbol {x}} _ {m} (t) = \boldsymbol {A} \boldsymbol {x} _ {m} (t) + \boldsymbol {B} \boldsymbol {u} _ {m} (t), m = 1, 2, \dots , N \tag {4-1} x˙m(t)=Axm(t)+Bum(t),m=1,2,…,N(4-1)
其中 xm(t)=[xm1(t),xm2(t),…,xmn(t)]T∈Rn,um(t)∈Rk\pmb{x}_{m}(t) = [x_{m1}(t), x_{m2}(t), \dots, x_{mn}(t)]^{\mathrm{T}} \in \mathbb{R}^{n}, \pmb{u}_{m}(t) \in \mathbb{R}^{k}xm(t)=[xm1(t),xm2(t),…,xmn(t)]T∈Rn,um(t)∈Rk 分别为第 mmm 个智能体的状态量和控制量。
定义4.1[139]对于任意初始条件,如果满足下列条件:
limt→∞=∥xm(t)−xj(t)∥=0,∀m,j=1,2,…,N(4-2) \lim _ {t \rightarrow \infty} = \| \boldsymbol {x} _ {m} (t) - \boldsymbol {x} _ {j} (t) \| = 0, \forall m, j = 1, 2, \dots , N \tag {4-2} t→∞lim=∥xm(t)−xj(t)∥=0,∀m,j=1,2,…,N(4-2)
则称多智能体系统(4-1)达到了一致。
为实现一致性,设计如下基于采样机制的分布式控制器:
um(t)=cK∑m=1j≠mNamj(xj(tk)−xm(tk)),t∈[tk,tk+1),k∈I(4 - 3) \boldsymbol {u} _ {m} (t) = c \boldsymbol {K} \sum_ {\substack {m = 1 \\ j \neq m}} ^ {N} a _ {m j} \left(\boldsymbol {x} _ {j} \left(t _ {k}\right) - \boldsymbol {x} _ {m} \left(t _ {k}\right)\right), t \in \left[ t _ {k}, t _ {k + 1}\right), k \in \mathbb {I} \tag{4 - 3} um(t)=cKm=1j=m∑Namj(xj(tk)−xm(tk)),t∈[tk,tk+1),k∈I(4 - 3)
其中, ccc 为耦合系数, K\pmb{K}K 为待求解的控制器增益矩阵。
该控制器基于零阶保持器的原理,其控制框图如图4-1所示,在相邻的采样区间内保持上一采样时刻的信息,满足 0=t0<t1<⋯<tk<…limk→∞tk=+∞0 = t_0 < t_1 < \dots < t_k < \dots \lim_{k\to \infty}t_k = +\infty0=t0<t1<⋯<tk<…limk→∞tk=+∞ ,考虑采样周期有上界 hMh_MhM ,即: 0<δk≜tk+1−tk≤hM,∀k≥00 < \delta_k\triangleq t_{k + 1} - t_k\leq h_M,\forall k\geq 00<δk≜tk+1−tk≤hM,∀k≥0 。
定义如下向量:
x(t)=[x1T(t),…,xN−1T(t),xNT(t)]T(4-4) \boldsymbol {x} (t) = \left[ \boldsymbol {x} _ {1} ^ {\mathrm {T}} (t), \dots , \boldsymbol {x} _ {N - 1} ^ {\mathrm {T}} (t), \boldsymbol {x} _ {N} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}} \tag {4-4} x(t)=[x1T(t),…,xN−1T(t),xNT(t)]T(4-4)
x(tk)=[x1T(tk),…,xN−1T(tk),xNT(tk)]T \boldsymbol {x} (t _ {k}) = [ \boldsymbol {x} _ {1} ^ {\mathrm {T}} (t _ {k}), \dots , \boldsymbol {x} _ {N - 1} ^ {\mathrm {T}} (t _ {k}), \boldsymbol {x} _ {N} ^ {\mathrm {T}} (t _ {k}) ] ^ {\mathrm {T}} x(tk)=[x1T(tk),…,xN−1T(tk),xNT(tk)]T
整合式(4-1)、(4-3)、(4-4)得到:
x˙(t)=(IN⊗A)x(t)−c(L⊗BK)x(tk)(4-5) \dot {\boldsymbol {x}} (t) = \left(\boldsymbol {I} _ {N} \otimes \boldsymbol {A}\right) \boldsymbol {x} (t) - c (\boldsymbol {L} \otimes \boldsymbol {B K}) \boldsymbol {x} \left(t _ {k}\right) \tag {4-5} x˙(t)=(IN⊗A)x(t)−c(L⊗BK)x(tk)(4-5)
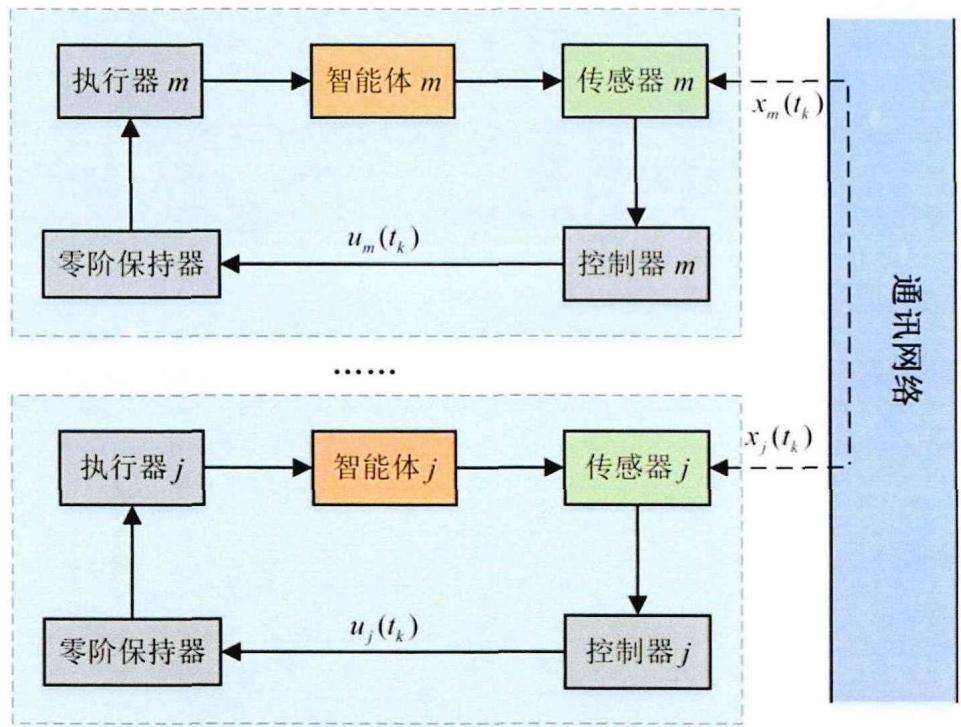
图4-1基于采样机制的多智能体系统控制框图
Fig.4-1 Control block diagram of multi-agent system based on sampling mechanism
通常对于给定的多智能体模型(4-1),衡量采样控制器好坏的标准为在保证系统一致性的前提下尽可能的获得更大的采样区间,即尽可能减少信息传递次数。下文将给出两个定理阐述如何实现上述目的。
为方便阐述后续定理,在此给出相关矩阵和向量的定义:
η1(t)=[∫tktx˙T(s)ds,∫tktxT(s)ds]T \boldsymbol {\eta} _ {1} (t) = \left[ \int_ {t _ {k}} ^ {t} \dot {\boldsymbol {x}} ^ {\mathrm {T}} (s) \mathrm {d} s, \int_ {t _ {k}} ^ {t} \boldsymbol {x} ^ {\mathrm {T}} (s) \mathrm {d} s \right] ^ {\mathrm {T}} η1(t)=[∫tktx˙T(s)ds,∫tktxT(s)ds]T
η2(t)=[∫ttk+1x˙T(s)ds,∫ttk+1xT(s)ds]T \boldsymbol {\eta} _ {2} (t) = \left[ \int_ {t} ^ {t _ {k + 1}} \dot {\boldsymbol {x}} ^ {\mathrm {T}} (s) \mathrm {d} s, \int_ {t} ^ {t _ {k + 1}} \boldsymbol {x} ^ {\mathrm {T}} (s) \mathrm {d} s \right] ^ {\mathrm {T}} η2(t)=[∫ttk+1x˙T(s)ds,∫ttk+1xT(s)ds]T
η3=[xT(tk),xT(tk+1),∫tktk+1xT(s)ds]T \boldsymbol {\eta} _ {3} = \left[ \boldsymbol {x} ^ {\mathrm {T}} \left(t _ {k}\right), \boldsymbol {x} ^ {\mathrm {T}} \left(t _ {k + 1}\right), \int_ {t _ {k}} ^ {t _ {k + 1}} \boldsymbol {x} ^ {\mathrm {T}} (s) \mathrm {d} s \right] ^ {\mathrm {T}} η3=[xT(tk),xT(tk+1),∫tktk+1xT(s)ds]T
η4(t)=[(tk+1−t)η1T(t),(t−tk)η2T(t)]T \boldsymbol {\eta} _ {4} (t) = \left[ \left(t _ {k + 1} - t\right) \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t), \left(t - t _ {k}\right) \boldsymbol {\eta} _ {2} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}} η4(t)=[(tk+1−t)η1T(t),(t−tk)η2T(t)]T
η5(t)=[η1T(t),η2T(t)]T,η6(t)=[z˙T(t),zT(t)] \boldsymbol {\eta} _ {5} (t) = \left[ \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t), \boldsymbol {\eta} _ {2} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}}, \boldsymbol {\eta} _ {6} (t) = \left[ \dot {\boldsymbol {z}} ^ {\mathrm {T}} (t), \boldsymbol {z} ^ {\mathrm {T}} (t) \right] η5(t)=[η1T(t),η2T(t)]T,η6(t)=[z˙T(t),zT(t)]
η7(t)=[−η1T(t),η2T(t)]T,η8(t)=[0,−η6T(t)]T \boldsymbol {\eta} _ {7} (t) = \left[ - \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t), \boldsymbol {\eta} _ {2} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}}, \boldsymbol {\eta} _ {8} (t) = \left[ 0, - \boldsymbol {\eta} _ {6} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}} η7(t)=[−η1T(t),η2T(t)]T,η8(t)=[0,−η6T(t)]T
η9(t)=[0,η2T(t)]T,η10(t)=[η6T(t),−η6T(t)]T \boldsymbol {\eta} _ {9} (t) = \left[ 0, \boldsymbol {\eta} _ {2} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}}, \boldsymbol {\eta} _ {1 0} (t) = \left[ \boldsymbol {\eta} _ {6} ^ {\mathrm {T}} (t), - \boldsymbol {\eta} _ {6} ^ {\mathrm {T}} (t) \right] ^ {\mathrm {T}} η9(t)=[0,η2T(t)]T,η10(t)=[η6T(t),−η6T(t)]T
η11(t)=[η6T(t),0]T,η12(t)=[η1T(t),0]T \boldsymbol {\eta} _ {1 1} (t) = \left[ \boldsymbol {\eta} _ {6} ^ {\mathrm {T}} (t), 0 \right] ^ {\mathrm {T}}, \boldsymbol {\eta} _ {1 2} (t) = \left[ \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t), 0 \right] ^ {\mathrm {T}} η11(t)=[η6T(t),0]T,η12(t)=[η1T(t),0]T
η13(t)=[xT(t),x˙T(t),xT(tk)]T \boldsymbol {\eta} _ {1 3} (t) = \left[ \boldsymbol {x} ^ {\mathrm {T}} (t), \dot {\boldsymbol {x}} ^ {\mathrm {T}} (t), \boldsymbol {x} ^ {\mathrm {T}} \left(t _ {k}\right) \right] ^ {\mathrm {T}} η13(t)=[xT(t),x˙T(t),xT(tk)]T
ρ(t)=[zT(t),z˙T(t),zT(tk),∫tktzT(s)ds,zT(tk+1),∫ttk+1zT(s)ds]T \boldsymbol {\rho} (t) = \left[ z ^ {T} (t), \dot {z} ^ {T} (t), z ^ {T} \left(t _ {k}\right), \int_ {t _ {k}} ^ {t} z ^ {T} (s) d s, z ^ {T} \left(t _ {k + 1}\right), \int_ {t} ^ {t _ {k + 1}} z ^ {T} (s) d s \right] ^ {T} ρ(t)=[zT(t),z˙T(t),zT(tk),∫tktzT(s)ds,zT(tk+1),∫ttk+1zT(s)ds]T
ιj=[θm×(j−1)m,Im,θm×(6−j)m],j=1,2,…,6 \iota_ {j} = \left[ \boldsymbol {\theta} _ {m \times (j - 1) m}, \boldsymbol {I} _ {m}, \boldsymbol {\theta} _ {m \times (6 - j) m} \right], j = 1, 2, \dots , 6 ιj=[θm×(j−1)m,Im,θm×(6−j)m],j=1,2,…,6
γj=[θm×(j−1)m,Im,θm×(6−j)m],j=1,2,…,6 \gamma_ {j} = \left[ \boldsymbol {\theta} _ {m \times (j - 1) m}, \boldsymbol {I} _ {m}, \boldsymbol {\theta} _ {m \times (6 - j) m} \right], j = 1, 2, \dots , 6 γj=[θm×(j−1)m,Im,θm×(6−j)m],j=1,2,…,6
引理4.1[140]对于可微函数 y∈[a,b]→Rny \in [a, b] \to \mathbb{R}^ny∈[a,b]→Rn ,存在矩阵 H>0H > 0H>0 和维度相匹配的矩阵 W\pmb{W}W ,使得以下不等式成立:
$$
- \int_ {a} ^ {b} \dot {\mathbf {y}} ^ {\mathrm {T}} (s) \mathbf {H} \dot {\mathbf {y}} (s) \mathrm {d} s \leq \Phi \tag {4-6}
$$
其中 Φ=νθT(WH−1WT)θ+Sym{θTW[y(b)−y(a)]},ν=b−a\Phi = \nu \pmb{\theta}^{\mathrm{T}}(\pmb{W}\pmb{H}^{-1}\pmb{W}^{\mathrm{T}})\pmb{\theta} + \operatorname{Sym}\{\pmb{\theta}^{\mathrm{T}}\pmb{W}[\pmb{y}(b) - \pmb{y}(a)]\}, \nu = b - aΦ=νθT(WH−1WT)θ+Sym{θTW[y(b)−y(a)]},ν=b−a , θ\thetaθ 可以是任意维度相匹配的向量。
引理4.2[141]对于强连通图 G\pmb{G}G ,定义 ε=[ε1,ε2,…,εN]T\pmb {\varepsilon} = [\pmb {\varepsilon}_1,\pmb {\varepsilon}_2,\dots ,\pmb {\varepsilon}_N]^{\mathrm{T}}ε=[ε1,ε2,…,εN]T 为拉普拉斯矩阵 L\pmb{L}L 对应0特征值的特征向量,定义矩阵 Ξ=diag{ε1,ε2,…,εN}>0,WN×N=Ξ−εTε\Xi = diag\{\varepsilon_1,\varepsilon_2,\dots ,\varepsilon_N\} >0,W_{N\times N} = \Xi -\varepsilon^{\mathrm{T}}\varepsilonΞ=diag{ε1,ε2,…,εN}>0,WN×N=Ξ−εTε ,存在正定矩阵 HHH 使得如下等式成立:
xT(t)(WL⊗HIn)ρ(x(t))=−12∑m=1N∑s=1m≠sNεmlmj×(xm(t)−xj(t))T×H[ρ(xm(t))−ρ(xj(t))](4 - 7) \begin{array}{l} x ^ {\mathrm {T}} (t) \left(W L \otimes H I _ {n}\right) \rho (\boldsymbol {x} (t)) = - \frac {1}{2} \sum_ {m = 1} ^ {N} \sum_ {\substack {s = 1 \\ m \neq s}} ^ {N} \varepsilon_ {m} l _ {m j} \times \left(\boldsymbol {x} _ {m} (t) - \boldsymbol {x} _ {j} (t)\right) ^ {\mathrm {T}} \tag{4 - 7} \\ \times \boldsymbol {H} \left[ \boldsymbol {\rho} \left(\boldsymbol {x} _ {m} (t)\right) - \boldsymbol {\rho} \left(\boldsymbol {x} _ {j} (t)\right) \right] \\ \end{array} xT(t)(WL⊗HIn)ρ(x(t))=−21∑m=1N∑s=1m=sNεmlmj×(xm(t)−xj(t))T×H[ρ(xm(t))−ρ(xj(t))](4 - 7)
定理4.1对于线性多智能体系统(4-1),给定正实数 hMh_{M}hM 及控制器增益 κ\kappaκ ,如果存在矩阵 P>0,Q1>0,Q2>0P > 0, Q_1 > 0, Q_2 > 0P>0,Q1>0,Q2>0 ,以及常数矩阵 N1,N2,N3,N4,N5,N6,X1,X2,Z1,Z2,Z3N_{1}, N_{2}, N_{3}, N_{4}, N_{5}, N_{6}, X_{1}, X_{2}, Z_{1}, Z_{2}, Z_{3}N1,N2,N3,N4,N5,N6,X1,X2,Z1,Z2,Z3 ,对于任意 i,j=1,2,…,Ni,j = 1,2,\ldots,Ni,j=1,2,…,N ,且 δk∈{hm,hM}\delta_k \in \{h_m, h_M\}δk∈{hm,hM} ,满足以下不等式:
[Γ1+δkΓ2δkX1∗−Q1]<0(4-8) \left[ \begin{array}{c c} \boldsymbol {\Gamma} _ {1} + \delta_ {k} \boldsymbol {\Gamma} _ {2} & \sqrt {\delta_ {k}} \boldsymbol {X} _ {1} \\ * & - \boldsymbol {Q} _ {1} \end{array} \right] < 0 \tag {4-8} [Γ1+δkΓ2∗δkX1−Q1]<0(4-8)
[Γ1+δkΓ3δkX2∗−Q2]<0(4-9) \left[ \begin{array}{c c} \boldsymbol {\Gamma} _ {1} + \delta_ {k} \boldsymbol {\Gamma} _ {3} & \sqrt {\delta_ {k}} X _ {2} \\ * & - Q _ {2} \end{array} \right] < 0 \tag {4-9} [Γ1+δkΓ3∗δkX2−Q2]<0(4-9)
其中:
Γ1=Sym{l1TPl2+A3TN4A3−A1TN4A3+A5T(N5A6+N6A4)+X1A12+X2A13+A1TA2}−Δ1TN1Δ1−Δ2TN2Δ2 \begin{array}{l} \Gamma_ {1} = \operatorname {S y m} \left\{\boldsymbol {l} _ {1} ^ {\mathrm {T}} \boldsymbol {P} \boldsymbol {l} _ {2} + \boldsymbol {A} _ {3} ^ {\mathrm {T}} N _ {4} \boldsymbol {A} _ {3} - \boldsymbol {A} _ {1} ^ {\mathrm {T}} N _ {4} \boldsymbol {A} _ {3} + \boldsymbol {A} _ {5} ^ {\mathrm {T}} \left(N _ {5} \boldsymbol {A} _ {6} + N _ {6} \boldsymbol {A} _ {4}\right) + \boldsymbol {X} _ {1} \boldsymbol {A} _ {1 2} + \boldsymbol {X} _ {2} \boldsymbol {A} _ {1 3} + \boldsymbol {A} _ {1} ^ {\mathrm {T}} \boldsymbol {A} _ {2} \right\} \\ - \Delta_ {1} ^ {\mathrm {T}} N _ {1} \Delta_ {1} - \Delta_ {2} ^ {\mathrm {T}} N _ {2} \Delta_ {2} \\ \end{array} Γ1=Sym{l1TPl2+A3TN4A3−A1TN4A3+A5T(N5A6+N6A4)+X1A12+X2A13+A1TA2}−Δ1TN1Δ1−Δ2TN2Δ2
Γ2=Sym{Δ2TN2Δ3+Δ7T(N5Δ6+2N6Δ4)+Δ8TN5Δ9}+ι2TQ2ι2−Δ4TN3Δ4 \Gamma_ {2} = \operatorname {S y m} \left\{\Delta_ {2} ^ {\mathrm {T}} N _ {2} \Delta_ {3} + \Delta_ {7} ^ {\mathrm {T}} \left(N _ {5} \Delta_ {6} + 2 N _ {6} \Delta_ {4}\right) + \Delta_ {8} ^ {\mathrm {T}} N _ {5} \Delta_ {9} \right\} + \iota_ {2} ^ {\mathrm {T}} Q _ {2} \iota_ {2} - \Delta_ {4} ^ {\mathrm {T}} N _ {3} \Delta_ {4} Γ2=Sym{Δ2TN2Δ3+Δ7T(N5Δ6+2N6Δ4)+Δ8TN5Δ9}+ι2TQ2ι2−Δ4TN3Δ4
Γ3=Sym{Δ1TN1Δ3+Δ10T(N5Δ6+2N6Δ4)+Δ11TN5Δ9}+ι2TQ1ι2+Δ4TN3Δ4 \Gamma_ {3} = \operatorname {S y m} \left\{\Delta_ {1} ^ {\mathrm {T}} N _ {1} \Delta_ {3} + \Delta_ {1 0} ^ {\mathrm {T}} \left(N _ {5} \Delta_ {6} + 2 N _ {6} \Delta_ {4}\right) + \Delta_ {1 1} ^ {\mathrm {T}} N _ {5} \Delta_ {9} \right\} + \iota_ {2} ^ {\mathrm {T}} Q _ {1} \iota_ {2} + \Delta_ {4} ^ {\mathrm {T}} N _ {3} \Delta_ {4} Γ3=Sym{Δ1TN1Δ3+Δ10T(N5Δ6+2N6Δ4)+Δ11TN5Δ9}+ι2TQ1ι2+Δ4TN3Δ4
Δ1=[ι1T−ι3T,ι4T]T,Δ2=[ι5T−ι1T,ι6T]T,Δ3=[ι2T,ι1T]T \boldsymbol {\Delta} _ {1} = \left[ \boldsymbol {\iota} _ {1} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {3} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {4} ^ {\mathrm {T}} \right] ^ {\mathrm {T}}, \boldsymbol {\Delta} _ {2} = \left[ \boldsymbol {\iota} _ {5} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {1} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {6} ^ {\mathrm {T}} \right] ^ {\mathrm {T}}, \boldsymbol {\Delta} _ {3} = \left[ \boldsymbol {\iota} _ {2} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {1} ^ {\mathrm {T}} \right] ^ {\mathrm {T}} Δ1=[ι1T−ι3T,ι4T]T,Δ2=[ι5T−ι1T,ι6T]T,Δ3=[ι2T,ι1T]T
Δ4=[ι3T,ι5T,ι4T+ι6T]T,Δ5=[ι3T−ι1T,−ι4T,ι5T−ι1T,ι6T]T \boldsymbol {\Delta} _ {4} = \left[ \boldsymbol {\iota} _ {3} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {5} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {4} ^ {\mathrm {T}} + \boldsymbol {\iota} _ {6} ^ {\mathrm {T}} \right] ^ {\mathrm {T}}, \boldsymbol {\Delta} _ {5} = \left[ \boldsymbol {\iota} _ {3} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {1} ^ {\mathrm {T}}, - \boldsymbol {\iota} _ {4} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {5} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {1} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {6} ^ {\mathrm {T}} \right] ^ {\mathrm {T}} Δ4=[ι3T,ι5T,ι4T+ι6T]T,Δ5=[ι3T−ι1T,−ι4T,ι5T−ι1T,ι6T]T
Δ6=[ι1T−ι3T,ι4T,ι5T−ι1T,ι6T]T,Δ7=[0,0,−ι2T,−ι1T]T \boldsymbol {\Delta} _ {6} = \left[ \boldsymbol {\iota} _ {1} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {3} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {4} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {5} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {1} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {6} ^ {\mathrm {T}} \right] ^ {\mathrm {T}}, \boldsymbol {\Delta} _ {7} = \left[ 0, 0, - \boldsymbol {\iota} _ {2} ^ {\mathrm {T}}, - \boldsymbol {\iota} _ {1} ^ {\mathrm {T}} \right] ^ {\mathrm {T}} Δ6=[ι1T−ι3T,ι4T,ι5T−ι1T,ι6T]T,Δ7=[0,0,−ι2T,−ι1T]T
Δ8=[0,0,l5T−l1T,l6T]T,Δ9=[l2T,l1T,−l2T,−l1T]T \boldsymbol {\Delta} _ {8} = \left[ 0, 0, \boldsymbol {l} _ {5} ^ {\mathrm {T}} - \boldsymbol {l} _ {1} ^ {\mathrm {T}}, \boldsymbol {l} _ {6} ^ {\mathrm {T}} \right] ^ {\mathrm {T}}, \boldsymbol {\Delta} _ {9} = \left[ \boldsymbol {l} _ {2} ^ {\mathrm {T}}, \boldsymbol {l} _ {1} ^ {\mathrm {T}}, - \boldsymbol {l} _ {2} ^ {\mathrm {T}}, - \boldsymbol {l} _ {1} ^ {\mathrm {T}} \right] ^ {\mathrm {T}} Δ8=[0,0,l5T−l1T,l6T]T,Δ9=[l2T,l1T,−l2T,−l1T]T
Δ10=[ι2T,ι1T,0,0]T,Δ11=[ι1T−ι3T,ι4T,0,0]T \boldsymbol {\Delta} _ {1 0} = \left[ \boldsymbol {\iota} _ {2} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {1} ^ {\mathrm {T}}, 0, 0 \right] ^ {\mathrm {T}}, \boldsymbol {\Delta} _ {1 1} = \left[ \boldsymbol {\iota} _ {1} ^ {\mathrm {T}} - \boldsymbol {\iota} _ {3} ^ {\mathrm {T}}, \boldsymbol {\iota} _ {4} ^ {\mathrm {T}}, 0, 0 \right] ^ {\mathrm {T}} Δ10=[ι2T,ι1T,0,0]T,Δ11=[ι1T−ι3T,ι4T,0,0]T
Δ12=ι1−ι3,Δ13=ι5−ι1 \Delta_ {1 2} = \iota_ {1} - \iota_ {3}, \Delta_ {1 3} = \iota_ {5} - \iota_ {1} Δ12=ι1−ι3,Δ13=ι5−ι1
A1=[Z1,Z2,Z3,0,0,0] \boldsymbol {A} _ {1} = \left[ \boldsymbol {Z} _ {1}, \boldsymbol {Z} _ {2}, \boldsymbol {Z} _ {3}, 0, 0, 0 \right] A1=[Z1,Z2,Z3,0,0,0]
A2=[A,−I,lij/εjBK,0,0,0] \boldsymbol {A} _ {2} = [ \boldsymbol {A}, - \boldsymbol {I}, l _ {i j} / \varepsilon_ {j} \boldsymbol {B K}, 0, 0, 0 ] A2=[A,−I,lij/εjBK,0,0,0]
则该系统能达到一致性。
证明:
构造如下李雅普诺夫函数:
V(t)=V0(t)+∑m=16Vm(t),t∈(tk,tk+1)(4-10) V (t) = V _ {0} (t) + \sum_ {m = 1} ^ {6} V _ {m} (t), t \in \left(t _ {k}, t _ {k + 1}\right) \tag {4-10} V(t)=V0(t)+m=1∑6Vm(t),t∈(tk,tk+1)(4-10)
其中:
V0(t)=x⊤(t)(W⊗P)x(t) V _ {0} (t) = \boldsymbol {x} ^ {\top} (t) (\boldsymbol {W} \otimes \boldsymbol {P}) \boldsymbol {x} (t) V0(t)=x⊤(t)(W⊗P)x(t)
V1(t)=(tk+1−t)η1T(t)(W⊗N1)η1(t)−(t−tk)η2T(t)(W⊗N2)η2(t) V _ {1} (t) = \left(t _ {k + 1} - t\right) \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes N _ {1}\right) \boldsymbol {\eta} _ {1} (t) - \left(t - t _ {k}\right) \boldsymbol {\eta} _ {2} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes N _ {2}\right) \boldsymbol {\eta} _ {2} (t) V1(t)=(tk+1−t)η1T(t)(W⊗N1)η1(t)−(t−tk)η2T(t)(W⊗N2)η2(t)
V2(t)=(t−tk)(tk+1−t)η3T(W⊗N3)η3 V _ {2} (t) = \left(t - t _ {k}\right) \left(t _ {k + 1} - t\right) \boldsymbol {\eta} _ {3} ^ {\mathrm {T}} \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {3}\right) \boldsymbol {\eta} _ {3} V2(t)=(t−tk)(tk+1−t)η3T(W⊗N3)η3
V3(t)=2η1T(t)(W⊗N4)η2(t) V _ {3} (t) = 2 \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t) (\boldsymbol {W} \otimes \boldsymbol {N} _ {4}) \boldsymbol {\eta} _ {2} (t) V3(t)=2η1T(t)(W⊗N4)η2(t)
V4(t)=2η4T(t)[(W⊗N5)η5(t)+(W⊗N6)η3] V _ {4} (t) = 2 \boldsymbol {\eta} _ {4} ^ {\mathrm {T}} (t) \left[ \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {5}\right) \boldsymbol {\eta} _ {5} (t) + \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {6}\right) \boldsymbol {\eta} _ {3} \right] V4(t)=2η4T(t)[(W⊗N5)η5(t)+(W⊗N6)η3]
V5(t)=(tk+1−t)∫tktz˙T(s)(W⊗Q1)z˙(s)ds V _ {5} (t) = \left(t _ {k + 1} - t\right) \int_ {t _ {k}} ^ {t} \dot {z} ^ {\mathrm {T}} (s) \left(\boldsymbol {W} \otimes \boldsymbol {Q} _ {1}\right) \dot {z} (s) \mathrm {d} s V5(t)=(tk+1−t)∫tktz˙T(s)(W⊗Q1)z˙(s)ds
V6(t)=−(t−tk)∫ttk+1z˙T(s)(W⊗Q2)z˙(s)ds V _ {6} (t) = - \left(t - t _ {k}\right) \int_ {t} ^ {t _ {k + 1}} \dot {z} ^ {\mathrm {T}} (s) \left(\boldsymbol {W} \otimes \boldsymbol {Q} _ {2}\right) \dot {z} (s) \mathrm {d} s V6(t)=−(t−tk)∫ttk+1z˙T(s)(W⊗Q2)z˙(s)ds
构造的李雅普诺夫函数中矩阵 P,Q1,Q2P, Q_1, Q_2P,Q1,Q2 为正定矩阵,而 ∑m=16Vm(tk)=∑m=16Vm(tk+1)=0\sum_{m=1}^{6} V_m(t_k) = \sum_{m=1}^{6} V_m(t_{k+1}) = 0∑m=16Vm(tk)=∑m=16Vm(tk+1)=0 ,可知 V(t)>0V(t) > 0V(t)>0 ,因此构造的李雅普诺夫函数是有效的。
接下来沿多智能体系统(4-1)的轨迹计算 V(t)V(t)V(t) 对时间的导数:
V˙0(t)=2xT(t)(W⊗P)x˙(t)(4-11) \dot {V} _ {0} (t) = 2 \boldsymbol {x} ^ {T} (t) (\boldsymbol {W} \otimes \boldsymbol {P}) \dot {\boldsymbol {x}} (t) \tag {4-11} V˙0(t)=2xT(t)(W⊗P)x˙(t)(4-11)
V˙1(t)=−η1T(t)(W⊗N1)η1(t)−η2T(t)(W⊗N2)η2(t)+2(tk+1−t)η1T(t)(W⊗N1)η6(t)+2(t−tk)η2⊤(t)(W⊗N2)η6(t)(4-12) \begin{array}{l} \dot {V} _ {1} (t) = - \eta_ {1} ^ {\mathrm {T}} (t) (\boldsymbol {W} \otimes N _ {1}) \eta_ {1} (t) - \eta_ {2} ^ {\mathrm {T}} (t) (\boldsymbol {W} \otimes N _ {2}) \eta_ {2} (t) + 2 \left(t _ {k + 1} - t\right) \eta_ {1} ^ {\mathrm {T}} (t) (\boldsymbol {W} \otimes N _ {1}) \eta_ {6} (t) \tag {4-12} \\ + 2 \left(t - t _ {k}\right) \boldsymbol {\eta} _ {2} ^ {\top} (t) \left(W \otimes N _ {2}\right) \boldsymbol {\eta} _ {6} (t) \\ \end{array} V˙1(t)=−η1T(t)(W⊗N1)η1(t)−η2T(t)(W⊗N2)η2(t)+2(tk+1−t)η1T(t)(W⊗N1)η6(t)+2(t−tk)η2⊤(t)(W⊗N2)η6(t)(4-12)
V˙2(t)=(tk+1−t)η3T(W⊗N3)η3−(t−tk)η3T(W⊗N3)η3(4-13) \dot {V} _ {2} (t) = \left(t _ {k + 1} - t\right) \boldsymbol {\eta} _ {3} ^ {\mathrm {T}} \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {3}\right) \boldsymbol {\eta} _ {3} - \left(t - t _ {k}\right) \boldsymbol {\eta} _ {3} ^ {\mathrm {T}} \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {3}\right) \boldsymbol {\eta} _ {3} \tag {4-13} V˙2(t)=(tk+1−t)η3T(W⊗N3)η3−(t−tk)η3T(W⊗N3)η3(4-13)
V˙3(t)=2η6T(t)(W⊗N4)η2(t)−2η1T(t)(W⊗N4)η6(t)(4-14) \dot {V} _ {3} (t) = 2 \boldsymbol {\eta} _ {6} ^ {\mathrm {T}} (t) (\boldsymbol {W} \otimes N _ {4}) \boldsymbol {\eta} _ {2} (t) - 2 \boldsymbol {\eta} _ {1} ^ {\mathrm {T}} (t) (\boldsymbol {W} \otimes N _ {4}) \boldsymbol {\eta} _ {6} (t) \tag {4-14} V˙3(t)=2η6T(t)(W⊗N4)η2(t)−2η1T(t)(W⊗N4)η6(t)(4-14)
V˙4(t)=2η7⊤(t)[(W⊗N5)η5(t)+(W⊗N6)η3]+2(t−tk){η8⊤(t)[(W⊗N5)η5(t)+(W⊗N6)η3]+η9T(t)(W⊗N5)η10(t)}+2(tk+1−t){η11T(t)[(W⊗N5)η5(t)+(W⊗N6)η3]+η12T(t)(W⊗N5)η10(t)}(4-15) \begin{array}{l} \dot {V} _ {4} (t) = 2 \eta_ {7} ^ {\top} (t) \left[ \left(\boldsymbol {W} \otimes N _ {5}\right) \eta_ {5} (t) + \left(\boldsymbol {W} \otimes N _ {6}\right) \eta_ {3} \right] + 2 \left(t - t _ {k}\right) \left\{\eta_ {8} ^ {\top} (t) \left[ \left(\boldsymbol {W} \otimes N _ {5}\right) \eta_ {5} (t) \right. \right. \\ + \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {6}\right) \boldsymbol {\eta} _ {3} ] + \boldsymbol {\eta} _ {9} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {5}\right) \boldsymbol {\eta} _ {1 0} (t) \} + 2 \left(t _ {k + 1} - t\right) \left\{\boldsymbol {\eta} _ {1 1} ^ {\mathrm {T}} (t) \left[ \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {5}\right) \boldsymbol {\eta} _ {5} (t) \right. \right. \tag {4-15} \\ \left. + \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {6}\right) \boldsymbol {\eta} _ {3} \right] + \boldsymbol {\eta} _ {1 2} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes \boldsymbol {N} _ {5}\right) \boldsymbol {\eta} _ {1 0} (t) \} \\ \end{array} V˙4(t)=2η7⊤(t)[(W⊗N5)η5(t)+(W⊗N6)η3]+2(t−tk){η8⊤(t)[(W⊗N5)η5(t)+(W⊗N6)η3]+η9T(t)(W⊗N5)η10(t)}+2(tk+1−t){η11T(t)[(W⊗N5)η5(t)+(W⊗N6)η3]+η12T(t)(W⊗N5)η10(t)}(4-15)
V˙5(t)=(tk+1−t)x˙⊤(t)(W⊗Q1)x˙(t)+F1(4-16) \dot {V} _ {5} (t) = \left(t _ {k + 1} - t\right) \dot {\mathbf {x}} ^ {\top} (t) \left(\boldsymbol {W} \otimes \boldsymbol {Q} _ {1}\right) \dot {\mathbf {x}} (t) + \boldsymbol {F} _ {1} \tag {4-16} V˙5(t)=(tk+1−t)x˙⊤(t)(W⊗Q1)x˙(t)+F1(4-16)
V˙6(t)=(t−tk)x˙T(t)(W⊗Q2)x˙(t)+F2(4-17) \dot {V} _ {6} (t) = \left(t - t _ {k}\right) \dot {\boldsymbol {x}} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes \boldsymbol {Q} _ {2}\right) \dot {\boldsymbol {x}} (t) + \boldsymbol {F} _ {2} \tag {4-17} V˙6(t)=(t−tk)x˙T(t)(W⊗Q2)x˙(t)+F2(4-17)
为降低保守性,根据引理4.1,引入自由权矩阵 X1,X2X_{1}, X_{2}X1,X2 可得到如下变换:
F1=−∫tk′z˙T(s)(W⊗Q1)z˙(s)ds≤(t−tk)ρT(t)(W⊗X1)(W⊗Q1)−1(W⊗X1T)ρ(t)+Sym{ρT(t)(W⊗X1)[z(t)−z(tk)]}≤ρ⊤(t)[W⊗((t−tk)X1Q1−1X1⊤+Sym(X1Δ12))]ρ(t)(4-18) \begin{array}{l} F _ {1} = - \int_ {t _ {k}} ^ {\prime} \dot {z} ^ {\mathrm {T}} (s) \left(W \otimes Q _ {1}\right) \dot {z} (s) \mathrm {d} s \tag {4-18} \\ \leq \left(t - t _ {k}\right) \boldsymbol {\rho} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes \boldsymbol {X} _ {1}\right) \left(\boldsymbol {W} \otimes \boldsymbol {Q} _ {1}\right) ^ {- 1} \left(\boldsymbol {W} \otimes \boldsymbol {X} _ {1} ^ {\mathrm {T}}\right) \boldsymbol {\rho} (t) \\ + S y m \left\{\boldsymbol {\rho} ^ {T} (t) \left(\boldsymbol {W} \otimes \boldsymbol {X} _ {1}\right) [ z (t) - z \left(t _ {k}\right) ] \right\} \\ \leq \boldsymbol {\rho} ^ {\top} (t) [ \boldsymbol {W} \otimes ((t - t _ {k}) \boldsymbol {X} _ {1} \boldsymbol {Q} _ {1} ^ {- 1} \boldsymbol {X} _ {1} ^ {\top} + \operatorname {S y m} (\boldsymbol {X} _ {1} \boldsymbol {\Delta} _ {1 2})) ] \boldsymbol {\rho} (t) \\ \end{array} F1=−∫tk′z˙T(s)(W⊗Q1)z˙(s)ds≤(t−tk)ρT(t)(W⊗X1)(W⊗Q1)−1(W⊗X1T)ρ(t)+Sym{ρT(t)(W⊗X1)[z(t)−z(tk)]}≤ρ⊤(t)[W⊗((t−tk)X1Q1−1X1⊤+Sym(X1Δ12))]ρ(t)(4-18)
F2=−∫Itk+1z˙T(s)(W⊗Q2)z˙(s)ds≤(tk+1−t)ρT(t)(W⊗X2)(W⊗Q2)−1(W⊗X2T)ρ(t)+Sym{ρT(t)(W⊗X2)[z(tk+1)−z(t)]}≤ρ⊤(t)[W⊗((tk+1−t)X2Q2⊤X2⊤+Sym(X2A13))]ρ(t)(4-19) \begin{array}{l} \boldsymbol {F} _ {2} = - \int_ {I} ^ {t _ {k + 1}} \dot {\boldsymbol {z}} ^ {\mathrm {T}} (s) (\boldsymbol {W} \otimes \boldsymbol {Q} _ {2}) \dot {\boldsymbol {z}} (s) \mathrm {d} s \\ \leq \left(t _ {k + 1} - t\right) \boldsymbol {\rho} ^ {\mathrm {T}} (t) \left(\boldsymbol {W} \otimes \boldsymbol {X} _ {2}\right) \left(\boldsymbol {W} \otimes \boldsymbol {Q} _ {2}\right) ^ {- 1} \left(\boldsymbol {W} \otimes \boldsymbol {X} _ {2} ^ {\mathrm {T}}\right) \boldsymbol {\rho} (t) \tag {4-19} \\ + S y m \left\{\boldsymbol {\rho} ^ {T} (t) \left(\boldsymbol {W} \otimes \boldsymbol {X} _ {2}\right) \left[ z \left(t _ {k + 1}\right) - z (t) \right] \right\} \\ \leq \boldsymbol {\rho} ^ {\top} (t) [ \boldsymbol {W} \otimes ((t _ {k + 1} - t) X _ {2} Q _ {2} ^ {\top} X _ {2} ^ {\top} + S y m (X _ {2} A _ {1 3})) ] \boldsymbol {\rho} (t) \\ \end{array} F2=−∫Itk+1z˙T(s)(W⊗Q2)z˙(s)ds≤(tk+1−t)ρT(t)(W⊗X2)(W⊗Q2)−1(W⊗X2T)ρ(t)+Sym{ρT(t)(W⊗X2)[z(tk+1)−z(t)]}≤ρ⊤(t)[W⊗((tk+1−t)X2Q2⊤X2⊤+Sym(X2A13))]ρ(t)(4-19)
构造任意维度相匹配的矩阵 Z=[Z1,Z2,Z3]T\mathbf{Z} = [Z_1, Z_2, Z_3]^{\mathrm{T}}Z=[Z1,Z2,Z3]T ,根据多智能体系统(4-1)可得到如下0等式:
0=2η13(t)(W⊗Z)[(IN⊗A)x(t)−x˙(t)−c(L⊗BK)x(tk)](4-20) 0 = 2 \eta_ {1 3} (t) (\boldsymbol {W} \otimes \boldsymbol {Z}) [ (\boldsymbol {I} _ {N} \otimes \boldsymbol {A}) \boldsymbol {x} (t) - \dot {\boldsymbol {x}} (t) - c (\boldsymbol {L} \otimes \boldsymbol {B K}) \boldsymbol {x} (t _ {k}) ] \tag {4-20} 0=2η13(t)(W⊗Z)[(IN⊗A)x(t)−x˙(t)−c(L⊗BK)x(tk)](4-20)
定义如下矩阵与向量:
zˉ(t)=zl(t)−zs(t),zˉ(t)=z˙l(t)−z˙s(t) \bar {z} (t) = z _ {l} (t) - z _ {s} (t), \bar {z} (t) = \dot {z} _ {l} (t) - \dot {z} _ {s} (t) zˉ(t)=zl(t)−zs(t),zˉ(t)=z˙l(t)−z˙s(t)
zˉ(tk)=zl(tk)−zs(tk),zˉ(tk+1)=zl(tk+1)−zs(tk+1) \bar {z} \left(t _ {k}\right) = z _ {l} \left(t _ {k}\right) - z _ {s} \left(t _ {k}\right), \bar {z} \left(t _ {k + 1}\right) = z _ {l} \left(t _ {k + 1}\right) - z _ {s} \left(t _ {k + 1}\right) zˉ(tk)=zl(tk)−zs(tk),zˉ(tk+1)=zl(tk+1)−zs(tk+1)
z~(s)=∫tktzl(s)ds−∫tktzx(s)ds \tilde {z} (s) = \int_ {t _ {k}} ^ {t} z _ {l} (s) d s - \int_ {t _ {k}} ^ {t} z _ {x} (s) d s z~(s)=∫tktzl(s)ds−∫tktzx(s)ds
zˉ(s)=∫ttk+1zl(s)ds−∫ttk+1zs(s)ds \bar {z} (s) = \int_ {t} ^ {t _ {k + 1}} z _ {l} (s) d s - \int_ {t} ^ {t _ {k + 1}} z _ {s} (s) d s zˉ(s)=∫ttk+1zl(s)ds−∫ttk+1zs(s)ds
ρˉ(t)=[zˉT(t),z˙ˉT(t),zˉT(tk),z~T(s),zˉT(tk+1),zˉT(s)]T \bar {\boldsymbol {\rho}} (t) = \left[ \bar {z} ^ {\text {T}} (t), \bar {\dot {z}} ^ {\text {T}} (t), \bar {z} ^ {\text {T}} \left(t _ {k}\right), \tilde {z} ^ {\text {T}} (s), \bar {z} ^ {\text {T}} \left(t _ {k + 1}\right), \bar {z} ^ {\text {T}} (s) \right] ^ {T} ρˉ(t)=[zˉT(t),z˙ˉT(t),zˉT(tk),z~T(s),zˉT(tk+1),zˉT(s)]T
结合式(4-11)-(4-20),根据引理4.2,得到:
V˙(t)≤12∑i=1N∑j=1,j≠iNεiεjρˉT(t)[tk+1−tδkΠ1(δk)+t−tkδkΠ2(δk)]ρˉ(t)(4-21) \dot {V} (t) \leq \frac {1}{2} \sum_ {i = 1} ^ {N} \sum_ {j = 1, j \neq i} ^ {N} \varepsilon_ {i} \varepsilon_ {j} \bar {\boldsymbol {\rho}} ^ {\mathrm {T}} (t) \left[ \frac {t _ {k + 1} - t}{\delta_ {k}} \boldsymbol {\Pi} _ {1} (\delta_ {k}) + \frac {t - t _ {k}}{\delta_ {k}} \boldsymbol {\Pi} _ {2} (\delta_ {k}) \right] \bar {\boldsymbol {\rho}} (t) \tag {4-21} V˙(t)≤21i=1∑Nj=1,j=i∑NεiεjρˉT(t)[δktk+1−tΠ1(δk)+δkt−tkΠ2(δk)]ρˉ(t)(4-21)
其中
Π1(δk)=Γ1+δkΓ2+δkX1Q1−1X1T \boldsymbol {\Pi} _ {1} (\delta_ {k}) = \boldsymbol {\Gamma} _ {1} + \delta_ {k} \boldsymbol {\Gamma} _ {2} + \delta_ {k} \boldsymbol {X} _ {1} \boldsymbol {Q} _ {1} ^ {- 1} \boldsymbol {X} _ {1} ^ {T} Π1(δk)=Γ1+δkΓ2+δkX1Q1−1X1T
Π2(δk)=Γ1+δkΓ3+δkX2Q2−1X2T \boldsymbol {\Pi} _ {2} (\delta_ {k}) = \boldsymbol {\Gamma} _ {1} + \delta_ {k} \boldsymbol {\Gamma} _ {3} + \delta_ {k} \boldsymbol {X} _ {2} \boldsymbol {Q} _ {2} ^ {- 1} \boldsymbol {X} _ {2} ^ {T} Π2(δk)=Γ1+δkΓ3+δkX2Q2−1X2T
根据补引理[142]可知 Π1(δk)<0,Π2(δk)<0\Pi_1(\delta_k) < 0, \Pi_2(\delta_k) < 0Π1(δk)<0,Π2(δk)<0 等价于式(4-8)和式(4-9),由此得出结论: V˙(t)<0\dot{V}(t) < 0V˙(t)<0 ,进而得到 limt→∞∥xj(t)−xi(t)∥→0\lim_{t \to \infty} \left\| x_j(t) - x_i(t) \right\| \to 0limt→∞∥xj(t)−xi(t)∥→0 。根据定义4.1,可知多智能体系统(4-1)可以达到一致性。至此定理4.1证明完毕。
接下来需要给出所需采样控制器的求解方式,基于定理4.1进行如下推导:
定理4.2对于线性多智能体系统(4-1),给定正实数 hMh_MhM , σi,i=1,2,3\sigma_i,i = 1,2,3σi,i=1,2,3 ,如果存在矩阵 P‾>0,Q‾1>0,Q‾2>0\overline{\pmb{P}} >0,\overline{\pmb{Q}}_1 > 0,\overline{\pmb{Q}}_2 > 0P>0,Q1>0,Q2>0 ,以及维数相匹配的矩阵 Nˉ1,Nˉ2,Nˉ3,Nˉ4,Nˉ5,Nˉ6,Nˉ7,Xˉ1,Xˉ2,Zˉ,J\bar{N}_1,\bar{N}_2,\bar{N}_3,\bar{N}_4,\bar{N}_5,\bar{N}_6,\bar{N}_7,\bar{X}_1,\bar{X}_2,\bar{Z},JNˉ1,Nˉ2,Nˉ3,Nˉ4,Nˉ5,Nˉ6,Nˉ7,Xˉ1,Xˉ2,Zˉ,J 对于任意 i,j=1,2,…,Ni,j = 1,2,\ldots ,Ni,j=1,2,…,N ,且 δk∈{hm,hM}\delta_{k}\in \left\{h_{m},h_{M}\right\}δk∈{hm,hM} ,满足以下不等式:
[Γˉ1+δkΓˉ2δkXˉ1∗−Qˉ1]<0(4-22) \left[ \begin{array}{c c} \bar {\Gamma} _ {1} + \delta_ {k} \bar {\Gamma} _ {2} & \sqrt {\delta_ {k}} \bar {X} _ {1} \\ * & - \bar {Q} _ {1} \end{array} \right] < 0 \tag {4-22} [Γˉ1+δkΓˉ2∗δkXˉ1−Qˉ1]<0(4-22)
[Γˉ1+δkΓˉ3δkXˉ2∗−Qˉ2]<0(4-23) \left[ \begin{array}{c c} \bar {\Gamma} _ {1} + \delta_ {k} \bar {\Gamma} _ {3} & \sqrt {\delta_ {k}} \bar {X} _ {2} \\ * & - \bar {Q} _ {2} \end{array} \right] < 0 \tag {4-23} [Γˉ1+δkΓˉ3∗δkXˉ2−Qˉ2]<0(4-23)
其中:
Γˉ1=Sym{t1TPˉt2+Δ3TNˉ4Δ3−Δ1TNˉ4Δ3+Δ5T(Nˉ5Δ6+Nˉ6Δ4)+Xˉ1Δ12+Xˉ2Δ13+Λˉ1TΛˉ2}−Δ1TN⃗1Δ1−Δ2TN⃗2Δ2 \begin{array}{l} \bar {\boldsymbol {\Gamma}} _ {1} = \operatorname {S y m} \{\boldsymbol {t} _ {1} ^ {\mathrm {T}} \bar {\boldsymbol {P}} \boldsymbol {t} _ {2} + \boldsymbol {\Delta} _ {3} ^ {\mathrm {T}} \bar {\boldsymbol {N}} _ {4} \boldsymbol {\Delta} _ {3} - \boldsymbol {\Delta} _ {1} ^ {\mathrm {T}} \bar {\boldsymbol {N}} _ {4} \boldsymbol {\Delta} _ {3} + \boldsymbol {\Delta} _ {5} ^ {\mathrm {T}} (\bar {\boldsymbol {N}} _ {5} \boldsymbol {\Delta} _ {6} + \bar {\boldsymbol {N}} _ {6} \boldsymbol {\Delta} _ {4}) + \bar {\boldsymbol {X}} _ {1} \boldsymbol {\Delta} _ {1 2} + \bar {\boldsymbol {X}} _ {2} \boldsymbol {\Delta} _ {1 3} + \bar {\boldsymbol {\Lambda}} _ {1} ^ {\mathrm {T}} \bar {\boldsymbol {\Lambda}} _ {2} \} \\ - \Delta_ {1} ^ {\mathrm {T}} \vec {N} _ {1} \Delta_ {1} - \Delta_ {2} ^ {\mathrm {T}} \vec {N} _ {2} \Delta_ {2} \\ \end{array} Γˉ1=Sym{t1TPˉt2+Δ3TNˉ4Δ3−Δ1TNˉ4Δ3+Δ5T(Nˉ5Δ6+Nˉ6Δ4)+Xˉ1Δ12+Xˉ2Δ13+Λˉ1TΛˉ2}−Δ1TN1Δ1−Δ2TN2Δ2
Γˉ2=Sym{Δ2TNˉ2Δ3+Δ7T(Nˉ5Δ6+2Nˉ6Δ4)+Δ8TNˉ5Δ9}+ι2TQˉ2ι2−Δ4TNˉ3Δ4 \bar {\Gamma} _ {2} = \operatorname {S y m} \left\{\Delta_ {2} ^ {\mathrm {T}} \bar {N} _ {2} \Delta_ {3} + \Delta_ {7} ^ {\mathrm {T}} \left(\bar {N} _ {5} \Delta_ {6} + 2 \bar {N} _ {6} \Delta_ {4}\right) + \Delta_ {8} ^ {\mathrm {T}} \bar {N} _ {5} \Delta_ {9} \right\} + \iota_ {2} ^ {\mathrm {T}} \bar {Q} _ {2} \iota_ {2} - \Delta_ {4} ^ {\mathrm {T}} \bar {N} _ {3} \Delta_ {4} Γˉ2=Sym{Δ2TNˉ2Δ3+Δ7T(Nˉ5Δ6+2Nˉ6Δ4)+Δ8TNˉ5Δ9}+ι2TQˉ2ι2−Δ4TNˉ3Δ4
Γˉ3=Sym{Δ1TNˉ1Δ3+Δ10T(Nˉ5Δ6+2Nˉ6Δ4)+Δ11TNˉ5Δ9}+ι2TQˉ1ι2+Δ4TNˉ3Δ4 \bar {\Gamma} _ {3} = \operatorname {S y m} \left\{\Delta_ {1} ^ {\mathrm {T}} \bar {N} _ {1} \Delta_ {3} + \Delta_ {1 0} ^ {\mathrm {T}} \left(\bar {N} _ {5} \Delta_ {6} + 2 \bar {N} _ {6} \Delta_ {4}\right) + \Delta_ {1 1} ^ {\mathrm {T}} \bar {N} _ {5} \Delta_ {9} \right\} + \iota_ {2} ^ {\mathrm {T}} \bar {Q} _ {1} \iota_ {2} + \Delta_ {4} ^ {\mathrm {T}} \bar {N} _ {3} \Delta_ {4} Γˉ3=Sym{Δ1TNˉ1Δ3+Δ10T(Nˉ5Δ6+2Nˉ6Δ4)+Δ11TNˉ5Δ9}+ι2TQˉ1ι2+Δ4TNˉ3Δ4
Aˉ1=[σ1I,σ2I,σ3I,0,0,0] \bar {A} _ {1} = \left[ \sigma_ {1} I, \sigma_ {2} I, \sigma_ {3} I, 0, 0, 0 \right] Aˉ1=[σ1I,σ2I,σ3I,0,0,0]
Aˉ2=[AZˉ,−Zˉ,lij/εjBJ,0,0,0] \bar {A} _ {2} = \left[ A \bar {Z}, - \bar {Z}, l _ {i j} / \varepsilon_ {j} B J, 0, 0, 0 \right] Aˉ2=[AZˉ,−Zˉ,lij/εjBJ,0,0,0]
则该系统能达到一致性。
证明:
定义如下矩阵:
Z1=σ1Z,Z2=σ2Z,Z3=σ3Z,Zˉ=Z−1,Pˉ=ZˉTPZˉ Z _ {1} = \sigma_ {1} Z, Z _ {2} = \sigma_ {2} Z, Z _ {3} = \sigma_ {3} Z, \bar {Z} = Z ^ {- 1}, \bar {P} = \bar {Z} ^ {\mathrm {T}} P \bar {Z} Z1=σ1Z,Z2=σ2Z,Z3=σ3Z,Zˉ=Z−1,Pˉ=ZˉTPZˉ
Qˉ1=ZˉTQ1Zˉ,Qˉ2=ZˉTQ2Zˉ,Gˉ=ZˉTGZˉ,Nˉ1=Φ1TN1Φ1 \bar {Q} _ {1} = \bar {Z} ^ {\mathrm {T}} Q _ {1} \bar {Z}, \bar {Q} _ {2} = \bar {Z} ^ {\mathrm {T}} Q _ {2} \bar {Z}, \bar {G} = \bar {Z} ^ {\mathrm {T}} G \bar {Z}, \bar {N} _ {1} = \Phi_ {1} ^ {\mathrm {T}} N _ {1} \Phi_ {1} Qˉ1=ZˉTQ1Zˉ,Qˉ2=ZˉTQ2Zˉ,Gˉ=ZˉTGZˉ,Nˉ1=Φ1TN1Φ1
Nˉ2=Φ1⊤N2Φ1,Nˉ3=Φ2⊤N3Φ2,Nˉ4=Φ1⊤N4Φ1 \bar {N} _ {2} = \boldsymbol {\Phi} _ {1} ^ {\top} N _ {2} \boldsymbol {\Phi} _ {1}, \bar {N} _ {3} = \boldsymbol {\Phi} _ {2} ^ {\top} N _ {3} \boldsymbol {\Phi} _ {2}, \bar {N} _ {4} = \boldsymbol {\Phi} _ {1} ^ {\top} N _ {4} \boldsymbol {\Phi} _ {1} Nˉ2=Φ1⊤N2Φ1,Nˉ3=Φ2⊤N3Φ2,Nˉ4=Φ1⊤N4Φ1
Nˉ5=Φ3TN4Φ3,Nˉ6=Φ3TN4Φ2,Xˉ1=Δ4TX1Zˉ \bar {N} _ {5} = \boldsymbol {\Phi} _ {3} ^ {\mathrm {T}} N _ {4} \boldsymbol {\Phi} _ {3}, \bar {N} _ {6} = \boldsymbol {\Phi} _ {3} ^ {\mathrm {T}} N _ {4} \boldsymbol {\Phi} _ {2}, \bar {X} _ {1} = \boldsymbol {\Delta} _ {4} ^ {\mathrm {T}} X _ {1} \bar {Z} Nˉ5=Φ3TN4Φ3,Nˉ6=Φ3TN4Φ2,Xˉ1=Δ4TX1Zˉ
Xˉ2=Δ4TX2Zˉ,Φ1=diag{Zˉ,Zˉ},Φ2=diag{Φ1,Zˉ} \bar {X} _ {2} = \Delta_ {4} ^ {\mathrm {T}} X _ {2} \bar {Z}, \Phi_ {1} = d i a g \{\bar {Z}, \bar {Z} \}, \Phi_ {2} = d i a g \{\Phi_ {1}, \bar {Z} \} Xˉ2=Δ4TX2Zˉ,Φ1=diag{Zˉ,Zˉ},Φ2=diag{Φ1,Zˉ}
Φ3=diag{Φ2,Zˉ},Φ4=diag{Φ3,Zˉ,Zˉ} \boldsymbol {\Phi} _ {3} = \operatorname {d i a g} \left\{\boldsymbol {\Phi} _ {2}, \bar {\boldsymbol {Z}} \right\}, \boldsymbol {\Phi} _ {4} = \operatorname {d i a g} \left\{\boldsymbol {\Phi} _ {3}, \bar {\boldsymbol {Z}}, \bar {\boldsymbol {Z}} \right\} Φ3=diag{Φ2,Zˉ},Φ4=diag{Φ3,Zˉ,Zˉ}
对式(4-8)和式(4-9)左乘 Φ4T\pmb{\Phi}_{4}^{\mathrm{T}}Φ4T 右乘 Φ4\pmb{\Phi}_{4}Φ4 进行相似变换即可得到式(4-22)和式(4-23)。且基于以上定理,可以得出采样控制器中的反馈控制矩阵为:
K=JZˉ−1(4-24) \boldsymbol {K} = \boldsymbol {J} \bar {\boldsymbol {Z}} ^ {- 1} \tag {4-24} K=JZˉ−1(4-24)
至此定理4.2证明完毕。
给定多智能体系统(4-1)的参数为:
A=[0−110],B=[10.50.51] \boldsymbol {A} = \left[ \begin{array}{c c} 0 & - 1 \\ 1 & 0 \end{array} \right], \boldsymbol {B} = \left[ \begin{array}{c c} 1 & 0. 5 \\ 0. 5 & 1 \end{array} \right] A=[01−10],B=[10.50.51]
其中 xi(t)=[xi1(t),xi2(t)]⊤(i=1,2,3,4,5)\pmb{x}_i(t) = [x_{i1}(t), x_{i2}(t)]^\top (i = 1,2,3,4,5)xi(t)=[xi1(t),xi2(t)]⊤(i=1,2,3,4,5) 。通讯拓扑 G\pmb{G}G 为强连通,可得到其拉普拉斯矩阵 L\pmb{L}L 的特征值为0时的左特征向量 ε=[0.2,0.2,0.2,0.2,0.2]⊤\varepsilon = [0.2,0.2,0.2,0.2,0.2]^\topε=[0.2,0.2,0.2,0.2,0.2]⊤ 。
基于定理4.2,代入上述系统参数可得到最大采样周期 hM=1.54h_M = 1.54hM=1.54 。表4-1列出了采用定理4.2和其他文献中的方法计算得到的最大采样周期对比,显然,本章所提出的方法优于其他文献。
定理4.2的推导基于自由权矩阵方法,无论是构造包含自由矩阵的李雅普诺夫函数或是采用含自由权阵的不等式引理来对积分项进行放缩,本质都是通过增加自由权矩阵的数量来降低保守性从而获得更大的采样区间,但此举也会增加算法的复杂度。此外上述方法对模型的精确度要求极高,难以将其拓展应用至具有复杂动态的飞轮储能系统中。因此下文将考虑一种更为简便可行的一致性算法。
表 4-1 采用不同方法得到的最大采样周期 hM{h}_{M}hM
Table 4-1 Maximum sampling period hMh_{M}hM of different methods
| 方法 | hM | 决策变量个数 |
| 定理2[143] | 1.01 | 19.5n2+2.5n |
| 定理2[144](α=0) | 1.40 | 19.5n2+2.5n |
| 定理4.2 | 1.54 | 58n2+6n |
五、总结
本报告对《基于多智能体协同的飞轮储能系统先进控制研究》进行了系统的专业术语统计与分析。文档总字符数167975,中文字符32662个,英文字词15525个,共提取专业术语1123个。高频术语“飞轮储能”(240次)、“母线电压”(99次)等构成了研究的核心概念体系。
文档涉及6个研究领域,主要集中在电力电子变换器(950次)、自抗扰控制(938次)、永磁同步电机(935次),体现了多学科交叉的研究特点。术语共现网络包含10个节点和24条边,最强关联对“飞轮储能系统”与“飞轮储能”共现86次,形成了以“协同控制”为中心的术语聚类。
英文缩写共出现24个,总频次216次,前五缩写“IEEE”(73次)等累计占比64.8%,反映了文档引用的经典文献和技术标准。
综上,本报告通过多维度术语统计,全面揭示了文档的知识结构和研究焦点。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐



 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)