
APM/PX4/betaflight/inav开源飞控之IMU方向
飞控硬件厂商在设计飞控的时候,在开发、测试阶段已经将IMU方向配置在硬件定义文件中了。目前,相对来说,国内比较主流的飞控代码可以分为两大类:两者坐标系有差别,尤其在硬件配置文件中定义的角度,更是出现非常离奇的情况。这里做一个整体应用级别的分析,希望能够帮助后续定位底层差异。3.2 betaflight/inav4. 实例注:始终采用Y轴方向朝前进行变换。相关映射,后续会补充,其主要原因,会随着底层
1. 源由
飞控硬件厂商在设计飞控的时候,在开发、测试阶段已经将IMU方向配置在硬件定义文件中了。
目前,相对来说,国内比较主流的飞控代码可以分为两大类:
- 航模:betaflight/inav
- 无人机:APM/PX4
两者坐标系有差别,尤其在硬件配置文件中定义的角度,更是出现非常离奇的情况。这里做一个整体应用级别的分析,希望能够帮助后续定位底层差异。
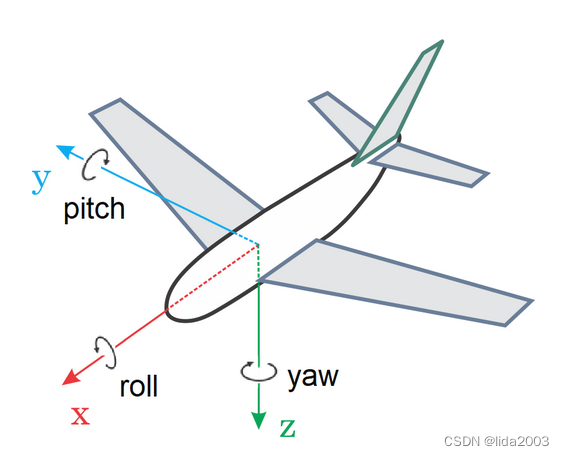
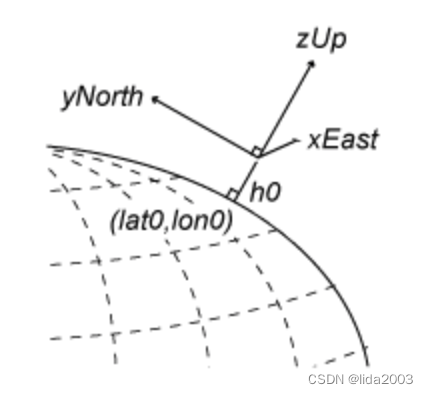
2. 坐标系
2.1 APM/PX4:机体坐标 + 右手系规则
2.2 betaflight/inav:xEast-yNorth-zUp + yaw反向 + 右手系规则
3. 转向定义
3.1 APM/PX4
enum Rotation : uint8_t {
ROTATION_NONE = 0,
ROTATION_YAW_45 = 1,
ROTATION_YAW_90 = 2,
ROTATION_YAW_135 = 3,
ROTATION_YAW_180 = 4,
ROTATION_YAW_225 = 5,
ROTATION_YAW_270 = 6,
ROTATION_YAW_315 = 7,
ROTATION_ROLL_180 = 8,
ROTATION_ROLL_180_YAW_45 = 9,
ROTATION_ROLL_180_YAW_90 = 10,
ROTATION_ROLL_180_YAW_135 = 11,
ROTATION_PITCH_180 = 12,
ROTATION_ROLL_180_YAW_225 = 13,
ROTATION_ROLL_180_YAW_270 = 14,
ROTATION_ROLL_180_YAW_315 = 15,
ROTATION_ROLL_90 = 16,
ROTATION_ROLL_90_YAW_45 = 17,
ROTATION_ROLL_90_YAW_90 = 18,
ROTATION_ROLL_90_YAW_135 = 19,
ROTATION_ROLL_270 = 20,
ROTATION_ROLL_270_YAW_45 = 21,
ROTATION_ROLL_270_YAW_90 = 22,
ROTATION_ROLL_270_YAW_135 = 23,
ROTATION_PITCH_90 = 24,
ROTATION_PITCH_270 = 25,
ROTATION_PITCH_180_YAW_90 = 26, // same as ROTATION_ROLL_180_YAW_270
ROTATION_PITCH_180_YAW_270 = 27, // same as ROTATION_ROLL_180_YAW_90
ROTATION_ROLL_90_PITCH_90 = 28,
ROTATION_ROLL_180_PITCH_90 = 29,
ROTATION_ROLL_270_PITCH_90 = 30,
ROTATION_ROLL_90_PITCH_180 = 31,
ROTATION_ROLL_270_PITCH_180 = 32,
ROTATION_ROLL_90_PITCH_270 = 33,
ROTATION_ROLL_180_PITCH_270 = 34,
ROTATION_ROLL_270_PITCH_270 = 35,
ROTATION_ROLL_90_PITCH_180_YAW_90 = 36,
ROTATION_ROLL_90_YAW_270 = 37,
ROTATION_ROLL_90_PITCH_68_YAW_293 = 38, // this is actually, roll 90, pitch 68.8, yaw 293.3
ROTATION_PITCH_315 = 39,
ROTATION_ROLL_90_PITCH_315 = 40,
ROTATION_PITCH_7 = 41,
ROTATION_ROLL_45 = 42,
ROTATION_ROLL_315 = 43,
///
// Do not add more rotations without checking that there is not a conflict
// with the MAVLink spec. MAV_SENSOR_ORIENTATION is expected to match our
// list of rotations here. If a new rotation is added it needs to be added
// to the MAVLink messages as well.
///
ROTATION_MAX,
ROTATION_CUSTOM_OLD = 100,
ROTATION_CUSTOM_1 = 101,
ROTATION_CUSTOM_2 = 102,
ROTATION_CUSTOM_END,
};
3.2 betaflight/inav
typedef enum {
ALIGN_DEFAULT = 0, // driver-provided alignment
// the order of these 8 values also correlate to corresponding code in ALIGNMENT_TO_BITMASK.
// R, P, Y
CW0_DEG = 1, // 00,00,00
CW90_DEG = 2, // 00,00,01
CW180_DEG = 3, // 00,00,10
CW270_DEG = 4, // 00,00,11
CW0_DEG_FLIP = 5, // 00,10,00 // _FLIP = 2x90 degree PITCH rotations
CW90_DEG_FLIP = 6, // 00,10,01
CW180_DEG_FLIP = 7, // 00,10,10
CW270_DEG_FLIP = 8, // 00,10,11
ALIGN_CUSTOM = 9, // arbitrary sensor angles, e.g. for external sensors
} sensor_align_e;
4. 实例
注:始终采用Y轴方向朝前进行变换。相关映射,后续会补充,其主要原因,会随着底层分析深入,给出答案!
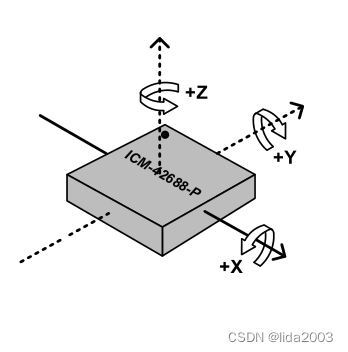
4.1 I n v e n s e n s e v 3 : : I C M 42688 P Invensensev3::ICM42688P Invensensev3::ICM42688P
正常旋转获得结果,XYZ轴重叠。
- APM/PX4:ROTATION_ROLL_180_YAW_90
- betaflight/inav:CW90_DEG
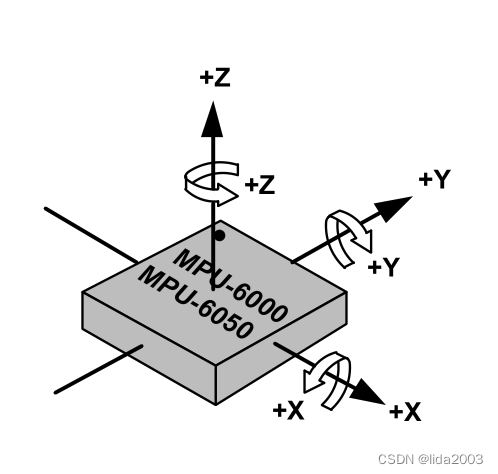
4.2 I n v e n s e n s e : : M P U 600 0 ∗ Invensense::MPU6000^* Invensense::MPU6000∗
非正常旋转,Y变成X、X变成Y、Z反向,需要驱动底层代码配合,以保持物理方向与应用的一致性。
- APM/PX4:ROTATION_NONE
- betaflight/inav:CW90_DEG
4.3 I n v e n s e n s e : : M P U 650 0 ∗ Invensense::MPU6500^* Invensense::MPU6500∗
非正常旋转,Y变成X、X变成Y、Z反向,需要驱动底层代码配合,以保持物理方向与应用的一致性。
- APM/PX4:ROTATION_NONE
- betaflight/inav:CW90_DEG

5. 参考资料
【1】BetaFlight深入传感设计之九:传感坐标系/机体坐标系/导航坐标系/经纬度坐标系
【2】BetaFlight深入传感设计之八:坐标系
【3】BetaFlight深入传感设计之五:MahonyAHRS & 方向余弦矩阵理论
【4】PX4-Flight Controller/Sensor Orientation
【5】betaflight-Flight-Controller-Orientation
【6】GeoGebra - 数学教学软件
【7】Ardupilot开源飞控之Invensense IMUs
6. 补充资料-常见bf-apm映射
# betaflight sensor alignment is a mysterious art
# some of these might be right but you should always check
alignment = {
"CW0" : "ROTATION_YAW_270",
"CW90" : "ROTATION_NONE",
"CW180" : "ROTATION_YAW_90",
"CW270" : "ROTATION_YAW_180",
"CW0FLIP" : "ROTATION_ROLL_180_YAW_270",
"CW90FLIP" : "ROTATION_ROLL_180",
"CW180FLIP" : "ROTATION_ROLL_180_YAW_90",
"CW270FLIP" : "ROTATION_PITCH_180",
"DEFAULT" : "ROTATION_NONE",
}

鸿蒙生态一站式服务平台。
更多推荐

 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)