覆盖规划算法
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达1. 简介覆盖规划是机器人学中一个问题,其应用场景包括自动农场,扫地机,扫描监视无人机等。其对应的问题被定义为:使机器人从某一起点开始,规划一条不与障碍物发生碰撞且尽可能短的路径,实现对划定区域的全覆盖。覆盖规划算法2. 问题分解解决覆盖路径规划问题的方法有很多,其中一种思路是,也是最常见的一种解决思路是区域分解法:1.首先将一
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达1. 简介
覆盖规划是机器人学中一个问题,其应用场景包括自动农场,扫地机,扫描监视无人机等。其对应的问题被定义为:使机器人从某一起点开始,规划一条不与障碍物发生碰撞且尽可能短的路径,实现对划定区域的全覆盖。
覆盖规划算法
2. 问题分解
解决覆盖路径规划问题的方法有很多,其中一种思路是,也是最常见的一种解决思路是区域分解法:
1.首先将一个复杂的空间分解为一系列简单几何图形的子区域,并对使用单一覆盖规则对子区域进行覆盖。
2.然后规划一条路线,连接所有的子区域,以确保路径覆盖所有的区域。
区域分解
这样,我们就将一个问题分解成了两个子问题。
3. 区域分解 (Cell Decomposition)
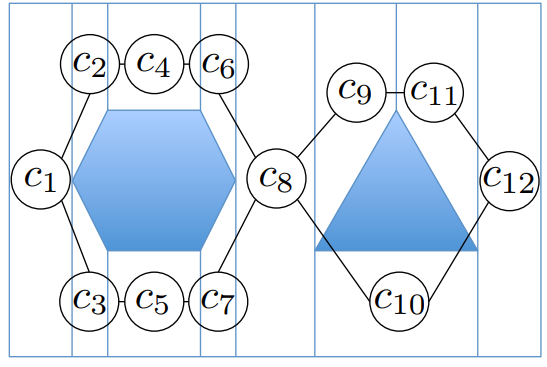
对于问题1来说,一种常见的思路是先找到区域内障碍物的顶点 (Vertex),沿着顶点画线直到与区域边界相交(或平行于 x, y 轴,或平行于障碍物的边)。这样复杂的几何区域便可以被分解为一个个凸多边形区域 (Convex Region)。
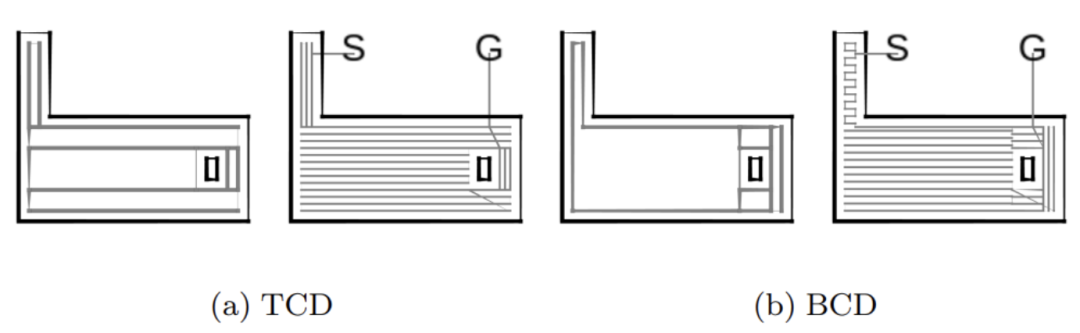
之后再使用平行线清扫的覆盖规则,对分解好的子空间进行规划。这样的方法叫做梯形分解 (trapezoidal cell decomposition, TCD)。
另外一种区域分解方式与TCD类似,叫弓形分解
(boustrophedon cell decompositon BCD),Boustrophedon的意思是牛耕地的方式。该方式与 TCD 的区别在于对画线顶点的选择。
TCD会对所有的顶点画延长线,但BCD只会选择那些两端都可以延长顶点画线。因此BCD先对于TCD来说减少了很多冗余的区域分解。因此BCD的分解方式也更加的流行一些。
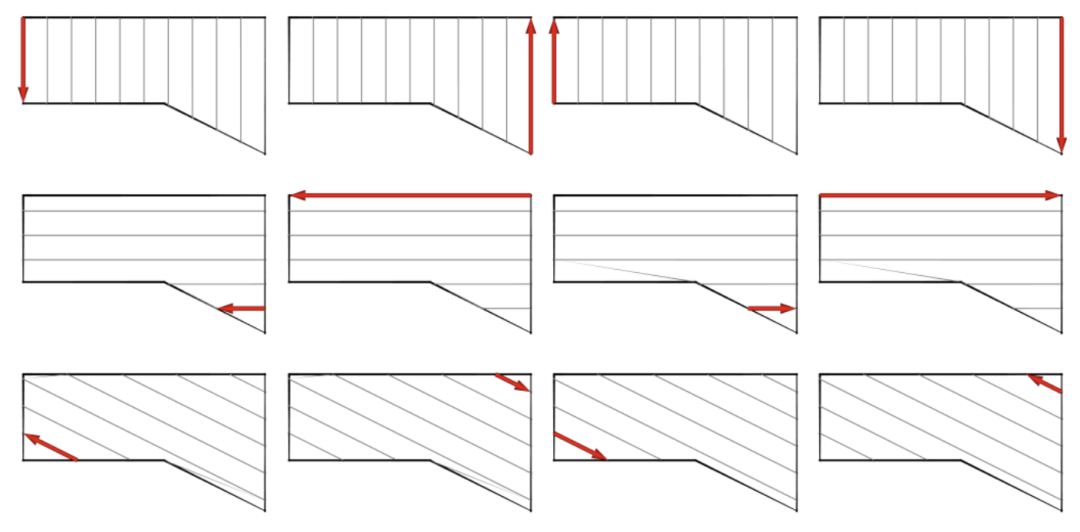
有了区域分解,接下来就是选择对子区域进行弓形覆盖时的方向,以及开始点了。
由于被分解后的图形都是非常简单几何形状,因此在方向的选择上就只有几何形状每条边的方向。开始点也只有每个子区域的顶点。
对于单个子区域来说,转弯数量最少的覆盖方向即为最优方案,但是对于全局来说,还需要考虑各个子区域之间的连线距离。从这个角度来说,区域分解方案的好坏可以使用下面的公式来衡量:

其中,m 是被分解出来的子区域的总数,ymax,i 是第 i 个被分解的区域的 y 坐标最大值顶点,ymin,i 是第 i 个被分解的区域的 y 坐标最小值顶点。w 为该分解的最小方向总和。
4. 旅行商问题
第二个子问题可以被归为旅行商问题。即在路径重复的情况下覆盖所有的目标点。
在本问题中则为找到一条可以连接所有子区域的最短路径。该问题的一种解决方案是使用遗传算法,或者是使用启发式算法,如以下链接,所提供的解决方案:
https://arxiv.org/pdf/1907.09224.pdf
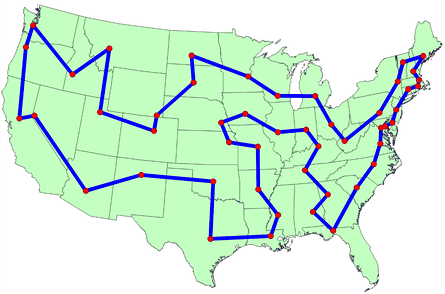
TSP
5. 代码
一个使用 ROS 的开源代码:
https://github.com/ethz-asl/polygon_coverage_planning
一个基于 OpenCV 的 C++ 方案:
https://github.com/RicheyHuang/CoveragePlanner
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)