
大疆Livox Mid360 使用指南
Livox Mid-360是一款性价比高、安全可靠的激光雷达传感器,适用于无人驾驶、机器人、智慧城市等领域。它支持建图、定位、识别、避障等功能。该激光雷达具有360°宽广的探测视场角,能够探测距离仅为0.1米的物体[1]。Livox Mid-360采用先进的光学机械系统,实现更远的量程、更高的点云密度和覆盖率,精确捕捉视场中的每个细节,适应性更强。用户可以通过Livox Viewer 2软件实时获
作者: Herman Ye @Galbot @Auromix
版本: V1.0
测试环境: Ubuntu20.04
更新日期: 2023/08/18
注1: 本文内容中的硬件由 @Galbot 提供支持。
注2: @Auromix 是一个机器人爱好者开源组织。
注3: 本文在更新日期经过测试,确认有效。
注4: 本文中直接引用Livox官方文档的部分内容,版权为Livox所有。
简易使用指南
Livox Viewer 2
# Go to Home
cd ~
# Download Livox Viewer 2
wget https://terra-1-g.djicdn.com/65c028cd298f4669a7f0e40e50ba1131/Mid360/LivoxViewer2%20for%20Ubuntu%20v2.3.0.zip
# Unzip
unzip "LivoxViewer2 for Ubuntu v2.3.0.zip"
# Go to Livox
cd "LivoxViewer2 for Ubuntu v2.3.0"
# Grant permission
chmod +x LivoxViewer2.sh
# Run Livox Viewer 2
./LivoxViewer2.sh

Livox SDK2
注意: 需要修改config里的IP
# Install cmake
sudo apt install cmake -y
# Go to Home
cd ~
# Download Livox SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
# Go to the SDK2 package
cd Livox-SDK2
# Create build folder
mkdir build
cd build
# Compile
cmake .. && make -j
# Install SDK2 in system
sudo make install
# Go to demo1
cd samples/livox_lidar_quick_start
# WARNING:
# Remember to modify the mid360_config.json with your PC IP 192.168.1.50
# Run demo1
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/mid360_config.json

Livox ROS
注意: 需要修改config里的IP
# Download the Livox ROS Driver 2 Package to ws_livox_src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
# Update ros dependencies
rosdep install --from-paths src --ignore-src -r -y
# Build the package
source /opt/ros/noetic/setup.sh
# Go to livox
cd cd livox_ros_driver2/
./build.sh ROS1
# Source workspace
echo "source ws_livox/devel/setup.sh" >> ~/.bashrc
source ~/.bashrc
# Warning:
# Remember to modify the mid360_config.json with your PC IP 192.168.1.50
# and your lidar IP 192.168.1.1XX (xx is the last two digits of the SN code)
roslaunch livox_ros_driver2 rviz_MID360.launch

注意事项
-
倒置安装Mid-360时,请确保在安装表面和地面之间保留不少于0.5米的空间。
-
在设备周围预留至少10毫米的空间以促进散热。
-
建议将Mid-360安装在平坦的金属表面上。金属基板的厚度应不少于3毫米,金属板的面积应不少于10000平方毫米,以便有效进行热散发。
-
Livox Mid-360的工作电压范围为9 V至27 V,建议工作电压为12 V。
-
注意避开近距离盲区,避免探测距离0.1米以内的物体。
Livox Mid-360激光雷达
概述
Livox Mid-360是一款性价比高、安全可靠的激光雷达传感器,适用于无人驾驶、机器人、智慧城市等领域。它支持建图、定位、识别、避障等功能。该激光雷达具有360°宽广的探测视场角,能够探测距离仅为0.1米的物体[1]。Livox Mid-360采用先进的光学机械系统,实现更远的量程、更高的点云密度和覆盖率,精确捕捉视场中的每个细节,适应性更强。用户可以通过Livox Viewer 2软件实时获取三维点云图像,也可以基于Livox SDK进行开发,轻松获取3D点云数据,以满足个性化的应用需求。Livox Mid-360的最大探测距离可达100米。
特点概述
-
多应用领域: Livox Mid-360高性能LiDAR雷达适用于多种应用领域,包括自动导航车辆、机器人技术、智能城市等,支持地图绘制、定位、识别、避障等多种功能。
-
紧凑设计: Mid-360采用紧凑设计,尺寸类似网球,重量仅265克,更适合在小型机器人上实现地图绘制和避障功能。
-
宽广视野: Mid-360的水平FOV达到360°,垂直最大FOV达到59°,宽广的视野使其能够更高效地检测周围的物体。
-
高角度精度: 通过先进的光学机械系统设计,Mid-360具有增加的探测范围和更高的点云密度和覆盖率。此外,Mid-360还具有非重复扫描技术,能够捕捉更多细节。
-
高可靠性: Mid-360具有增强的可靠性,设计中无需旋转的内部电子设备,如发射器和接收器。此外,Mid-360达到了IP67防水防尘等级(不包括电缆等附件)。工作温度范围为-20°C到55°C,也符合GB/T 28046.3-2011(中国大陆)和ISO 16750-3:2007(中国大陆外)的随机振动测试要求。
-
内置IMU模块: Mid-360内置了三轴加速度计和三轴陀螺仪。用户可以通过Livox Viewer 2或Livox SDK 2打开或关闭信息推送。Mid-360每秒推送200次信息。
-
用户友好的Livox Viewer 2: Livox Viewer 2是专为Livox LiDAR雷达设计的软件。它可以显示和记录实时点云数据,回放点云视频,并分析3D点云数据。用户可以使用Livox Viewer 2设置产品参数和校准外参。界面简单易用。
-
开源Livox SDK 2: 提供软件开发工具包(SDK),帮助开发可定制的应用程序,利用点云数据。Livox SDK 2支持Windows/Linux/Mac OS/ROS。访问 LivoxSDK2 了解更多信息。
-
Livox ROS Driver 2: Livox为ROS1和ROS2提供开源驱动程序。访问 Livox ROS Driver2 了解更多信息。
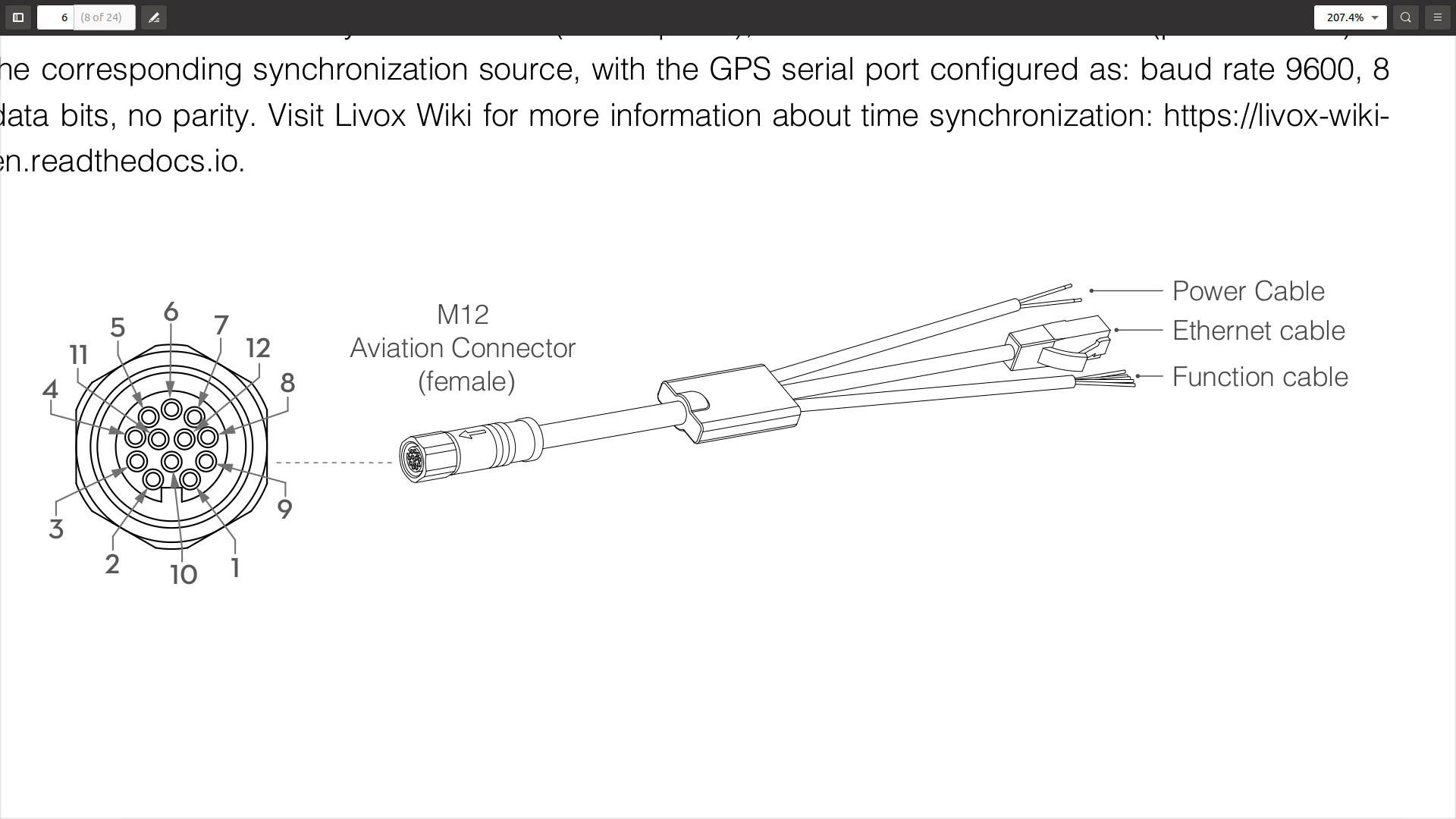
接线信息

| Pins | Signal Type | Description | Color |
|---|---|---|---|
| 1 | Power+ | Power DC 9V-27V | Red (positive) |
| 9 | Power+ | Power DC 9V-27V | Red (positive) |
| 2 | Ground | Power Ground | Black (negative) |
| 3 | Ground | Power Ground | Black (negative) |
| 4 | Ethernet-TX+ | Output Ethernet-TX+ | Orange/white |
| 5 | Ethernet-TX- | Output Ethernet-TX- | Orange |
| 6 | Ethernet-RX+ | Input Ethernet-RX+ | Green/white |
| 7 | Ethernet-RX- | Input Ethernet-RX- | Green |
| 8 | LVTTL_IN | Input 3.3V LVTTL Pulse per second | Gray/white |
| 10 | LVTTL_IN | Input 3.3V LVTTL GPS input | Gray |
| 11 | LVTTL_OUT | Output 3.3V LVTTL Reserved output IO | Purple |
| 12 | LVTTL_OUT | Output 3.3V LVTTL Reserved output IO | Purple |
| 2 & 3 | Ground | Ground | Black |
尺寸信息

其他重要信息
主控端的IP设置
Livox Mid-360使用用户数据报协议(UDP)传输数据。默认为静态IP地址模式。
修改主控的IPv4为以下参数
| 静态IP地址Address | 子网掩码Netmask | 网关Gateway |
|---|---|---|
| 192.168.1.50 | 255.255.255.0 | 192.168.1.1 |
或者使用IP一键配置脚本进行配置
修改Livox Mid 360的IP [optional]
Livox Mid 360的IP默认为192.168.1.1XX,XX为S/N码的最后两位
例如S/N码的最后两位为42,则IP为192.168.1.142
如果有修改需求,在将Mid-360连接到计算机后,启动计算机上的Livox Viewer 2。点击应更改的具有静态IP地址的设备。点击以打开设置页面,并设置Mid-360的静态IP地址。
注意: 在后续的使用中需要修改config文件里有关Host和Lidar的IP设置。
坐标系
右手坐标系,x轴指向Livox商标面对的方向

IMU
以200 Hz的频率推送IMU数据,可以在主机计算机上启用或禁用。IMU数据包含3轴加速度和3轴角速度,其方向与点云坐标相同。IMU芯片在点云坐标中的位置为
x=11.0mm
y=23.29mm
z=-44.12mm
参考资料

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 6
6 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)