
针对具有纯滞后环节的一阶惯性系统PID参数整定(衰减曲线法)
假定被控系统的传递函数为:

一、建立开环结构图,观察系统对阶跃输入信号的跟随性。
由图二可知:开环系统的的上升时间很长,并且输出到达不了给定值,下面对该系统进行PID参数整定,进行PID控制。

图1 系统开环结构图
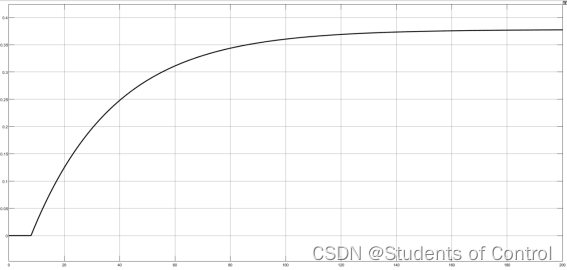
图2
二、PID参数整定
- 比例控制
当Kp = 1时,如图4,系统的上升时间明显缩短,但是仍然输出值低于给定值,存在稳态误差,接下来减小比例度δ,直至出现4:1衰减过程曲线,找到该状态下的比例度δ、与两相邻波峰间的时间间隔。
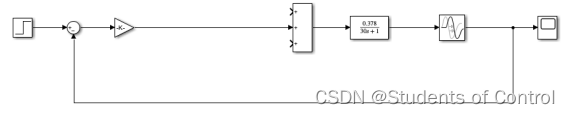
图3 比例控制
图4 纯比例控制( = 1)
- 调节δ,寻找4:1衰减过程曲线
如图5可知:当 = 12.26时,此时衰减比为4:1,此时
= 29.2s,δ =8.16%。
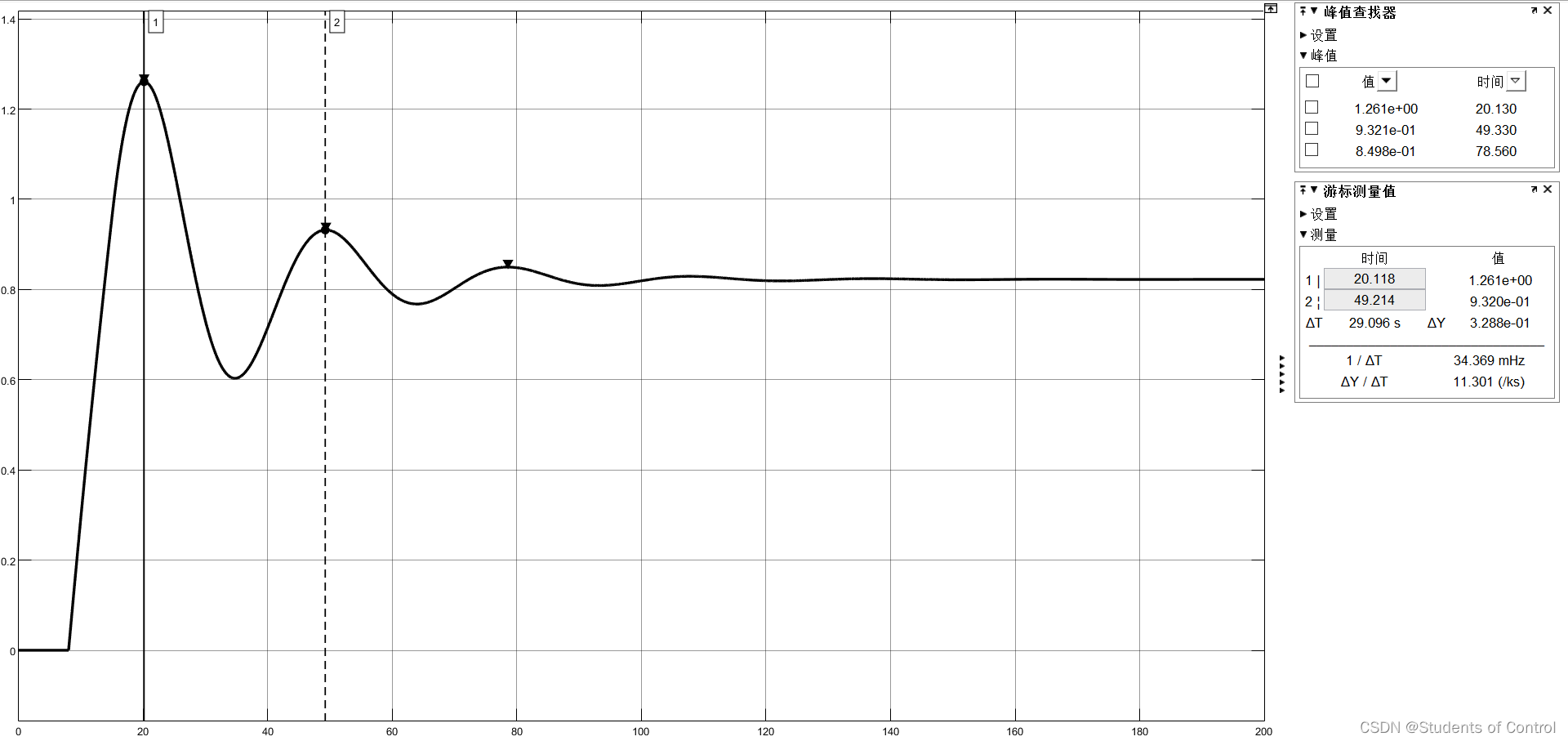
图5 4:1衰减过程曲线
- PI控制
由衰减曲线法公式可知PI控制参数:
| 控制类型 | 比例度 |
积分时间 |
微分时间 |
| P | |||
| PI | 1.2 |
0.5 |
|
| PID | 0.8 |
0.3 |
0.1 |
=9.792%;
= 10.212;
= 14.60s;
由图6可知,在PI控制下输出响应的响应速度与比例控制相比相差不大,但是PI控制消除了静态误差,但此时波动较大,过度时间很长,故下面进行PID控制。
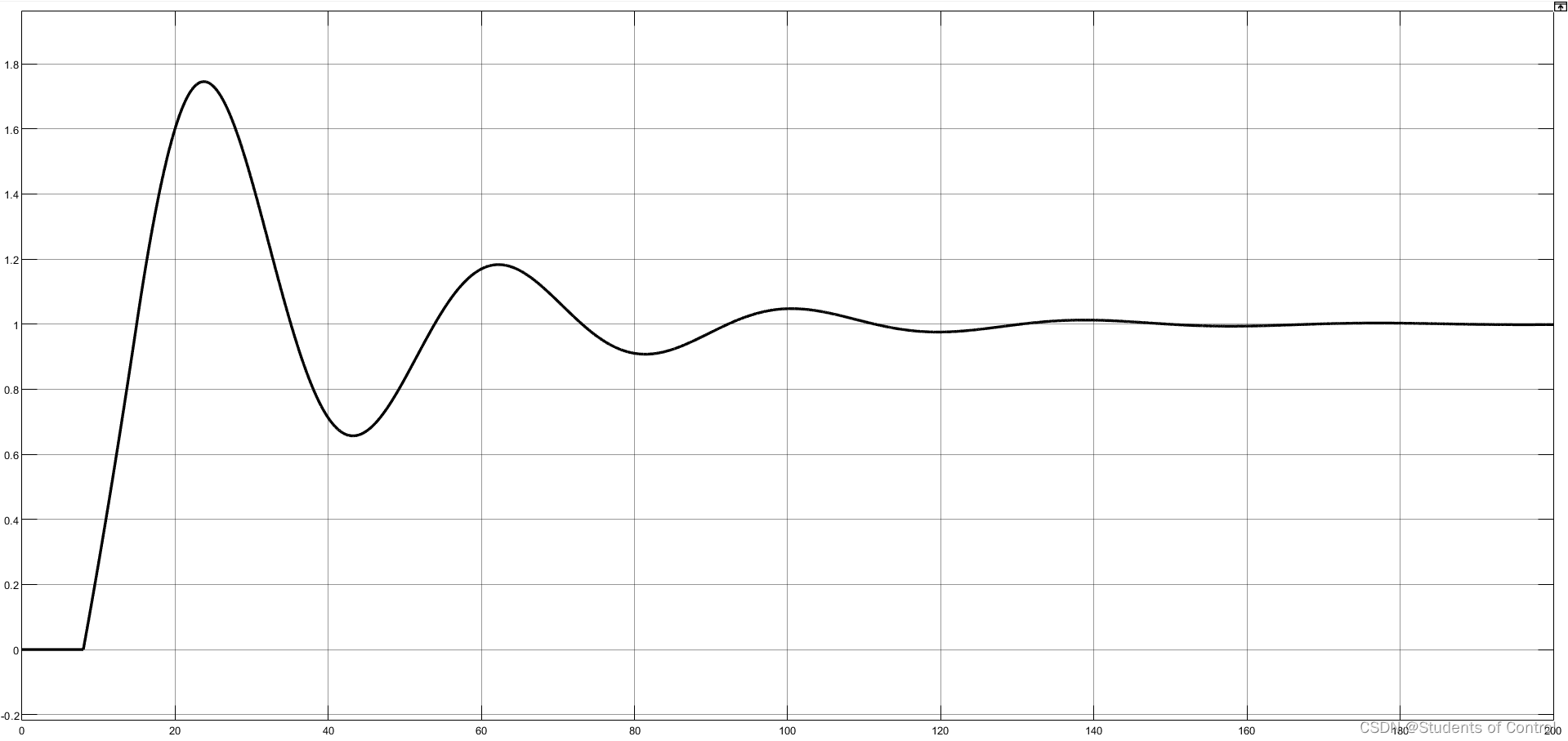
图6 PI例控制
- PID控制
由衰减曲线法公式可知PID控制参数:
=6.528%;
= 15.32;
= 8.76s;
= 2.92s;
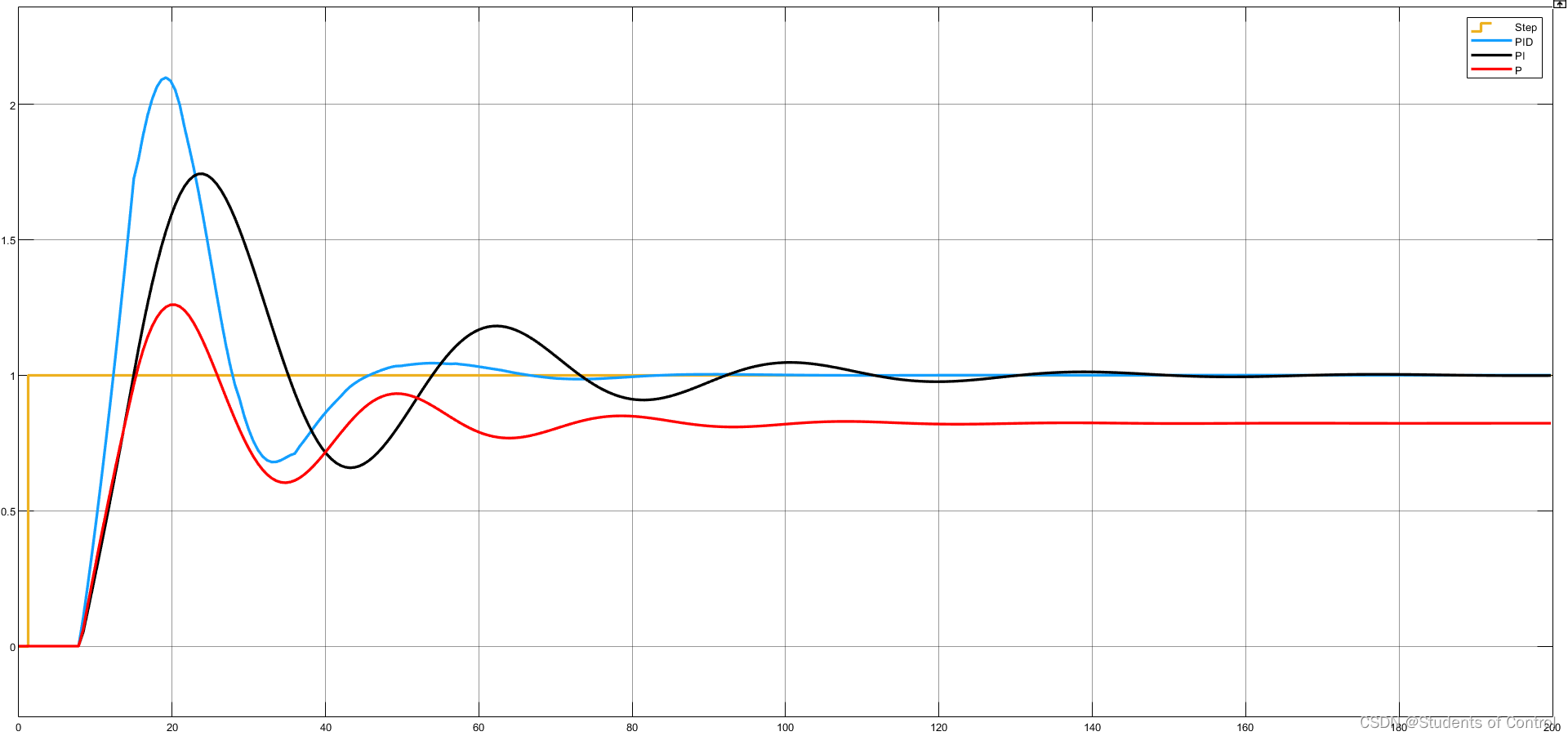
PID控制结构图如图7,其输出响应曲线如图8,通过图9对比P、PI、PID控制可以得出在PID控制下系统的输出震荡明显减弱,调节时间、上升时间减小,响应速度变快,系统的性能得到明显提高,但在PID控制下超调量较大,故下面将继续调整PID各项参数,试图得到超调量小、调节时间短、响应速度快的输出响应曲线。
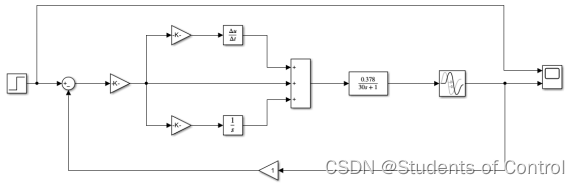
图7 PID控制结构图
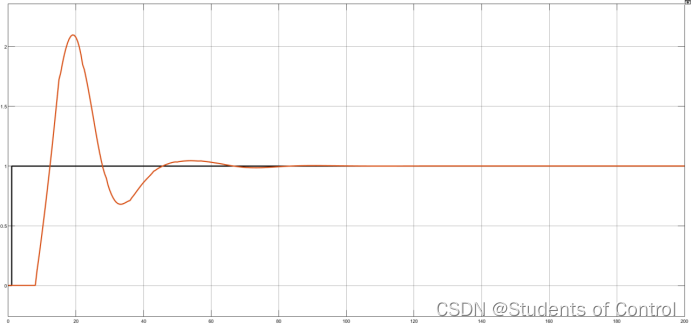
图8 PID例控制
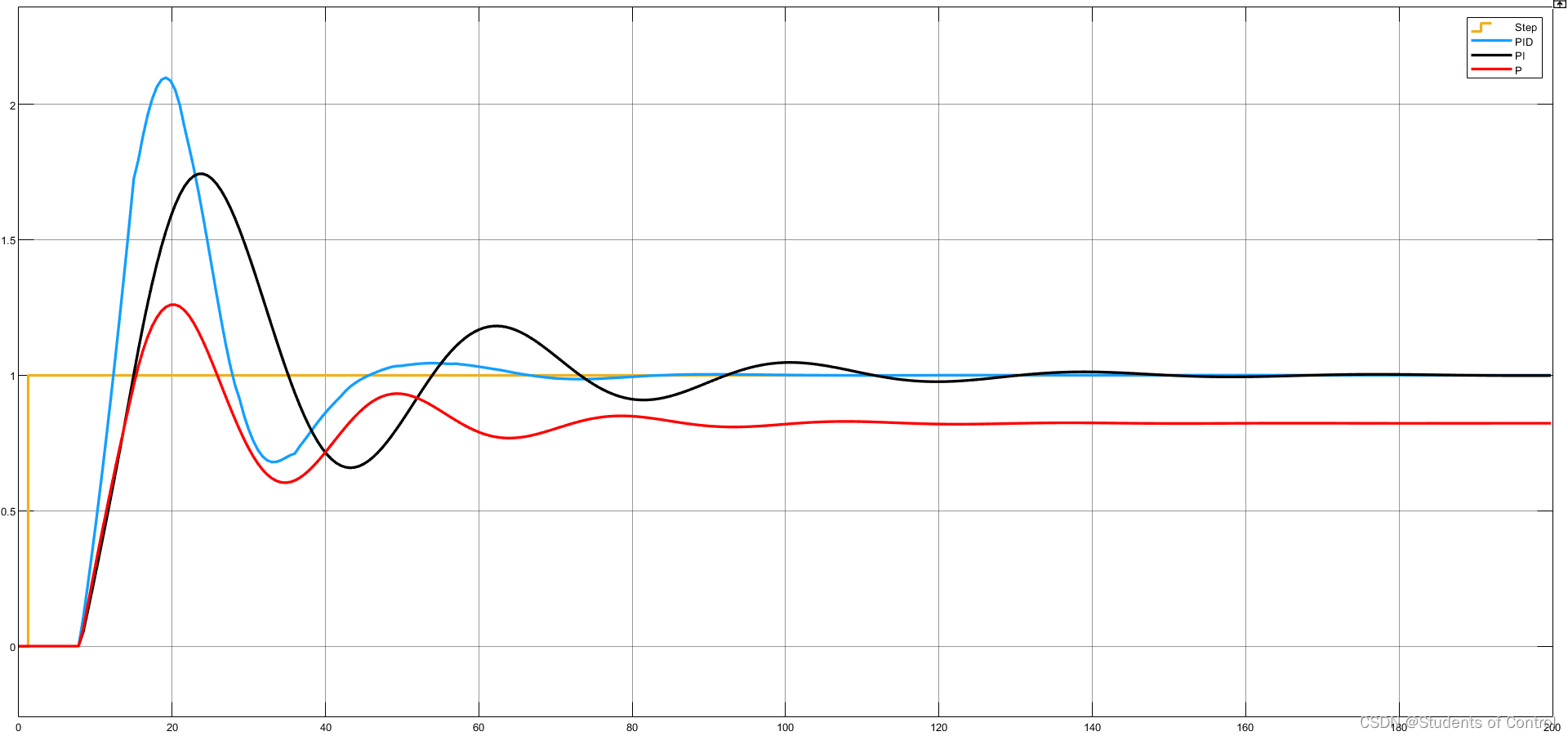
图9 P、PI、PID输出响应曲线
- PID控制参数调整
由于系统的超调量较大,故减小至超调量、调节时间适中时为为止。此时系统的输出响应曲线如图10所示,可见,此时系统的超调量仍然较大,达不到工业生产要求,故增大系统的积分时间调至系统输出响应曲线如图11所示,此时系统的超调量为2.8%,且调节时间较快,此时系统具有较好的动态性能。通过图12可以看出与P、PI、PID(参数未调节前)控制相比,此时系统的动态性能得到了极大地提高。
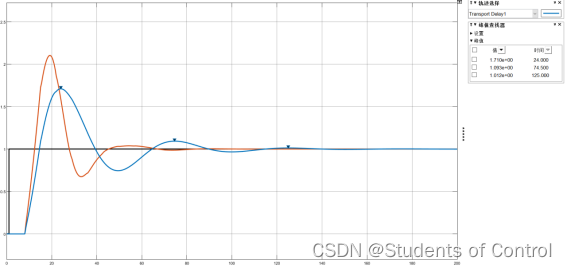
图10 减小后的输出响应曲线
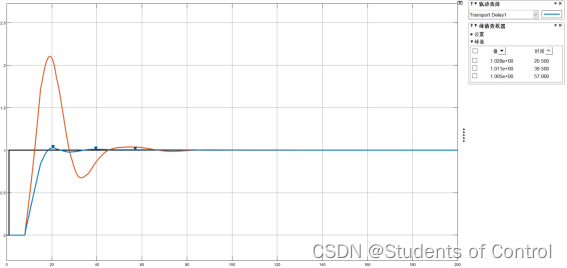
图11 增大后的输出响应曲线
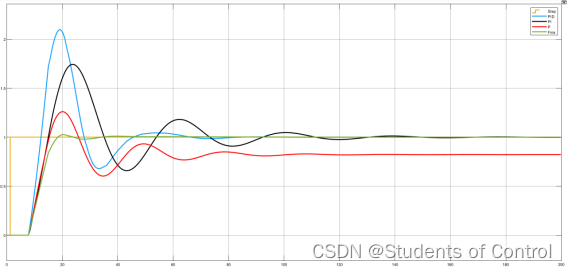
图12
- 系统抗扰性能分析
分别在90s与150s时对系统加入扰动,通过图13可以看出,该系统具有很好的抗扰能力。
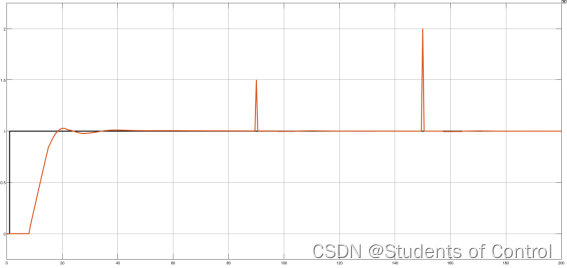
图13 抗扰性能分析

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 24
24 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)