
写文章




- @weixin_62293295
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
针对具有纯滞后环节的一阶惯性系统PID参数整定(衰减曲线法)
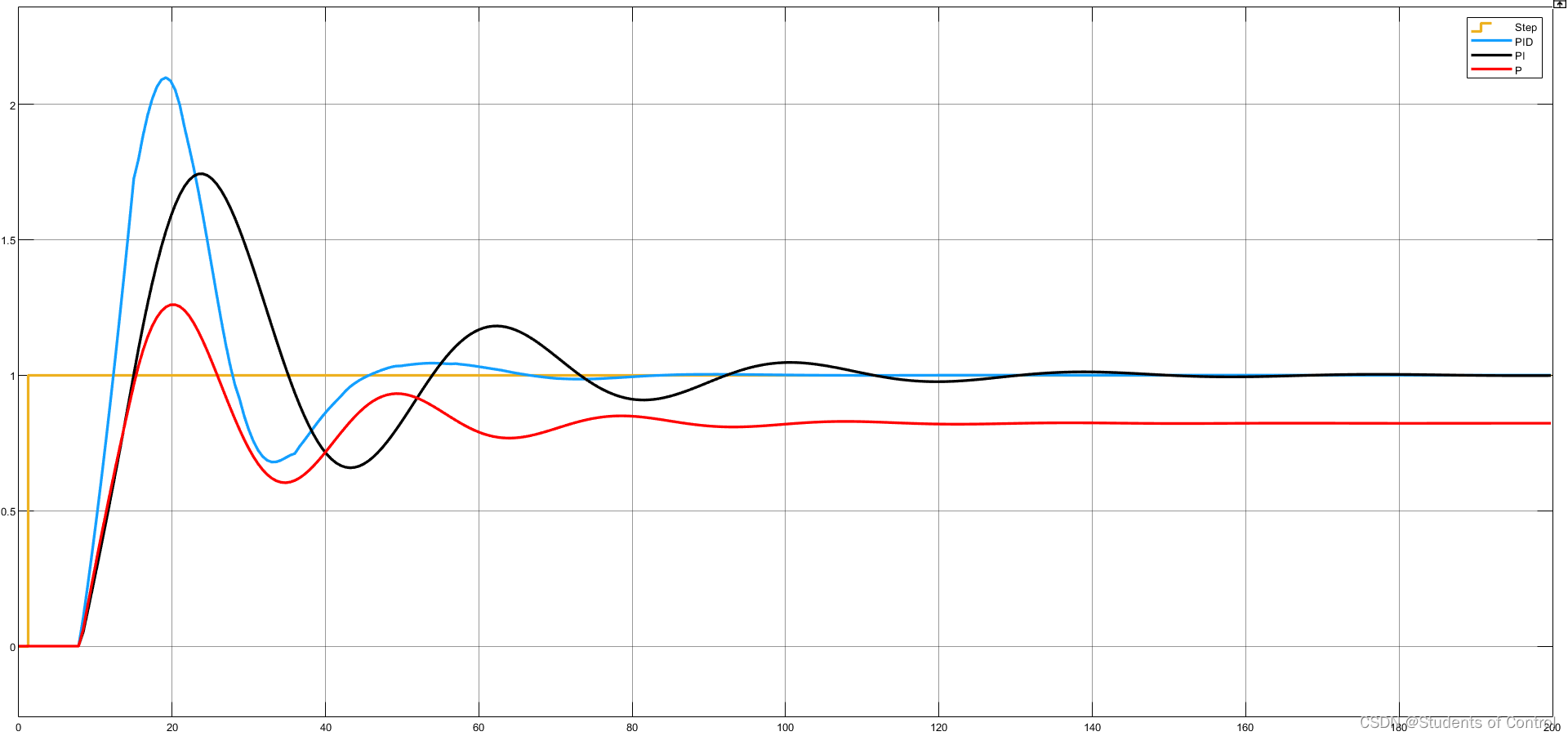
PID控制结构图如图7,其输出响应曲线如图8,通过图9对比P、PI、PID控制可以得出在PID控制下系统的输出震荡明显减弱,调节时间、上升时间减小,响应速度变快,系统的性能得到明显提高,但在PID控制下超调量较大,故下面将继续调整PID各项参数,试图得到超调量小、调节时间短、响应速度快的输出响应曲线。当Kp = 1时,如图4,系统的上升时间明显缩短,但是仍然输出值低于给定值,存在稳态误差,接下来减
到底了