OpenHarmony 项目实战:基于全志 XR806 实现的简易四足行走机器狗
小米在 2021 年发布的自研四足仿生机器人 ——CyberDog,使得 “仿生机器人” 这个话题 再次站在风口之上 ,伴随芯片、舵机、减速器等核心部件的发展,也期待更多更 “生动” 的 “仿生机器人” 出现 ,全志 XR806 是一款支持 WiFi 和 BLE 的芯片可满足智能机器人等领域的无线连接需求,今天就先带大家看一款基于全志 XR806 开源鸿蒙开发板做的四足行走机器狗。
小米在 2021 年发布的自研四足仿生机器人 ——CyberDog,使得 “仿生机器人” 这个话题 再次站在风口之上 ,伴随芯片、舵机、减速器等核心部件的发展,也期待更多更 “生动” 的 “仿生机器人” 出现 ,全志 XR806 是一款支持 WiFi 和 BLE 的芯片可满足智能机器人等领域的无线连接需求,今天就先带大家看一款基于全志 XR806 开源鸿蒙开发板做的四足行走机器狗。
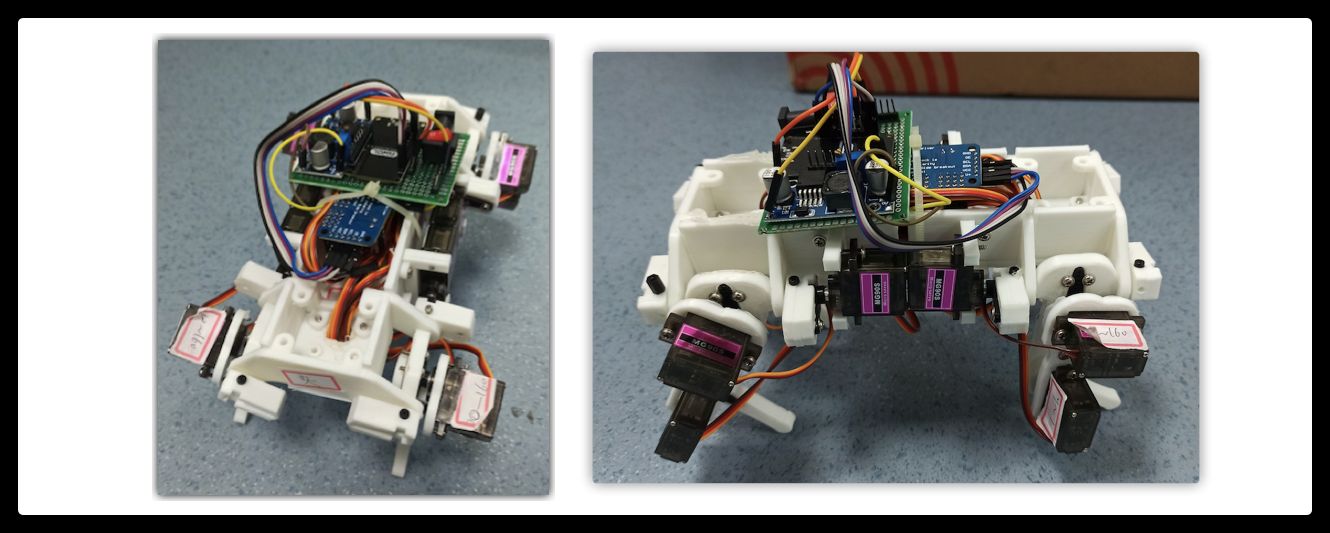
一、机器狗外观图
二、PCA9685 开发流程
狗子身上有 12 个舵机,一条腿接 3 个舵机,连接到一个 pca9685 舵机驱动上,舵机驱动通过 I2C 与 XR806 通信,XR806 有两个 I2C 接口,我主要是用第 1 个 (B14, B15),通过控制 PCA9685 上的寄存器来简介控制舵机。
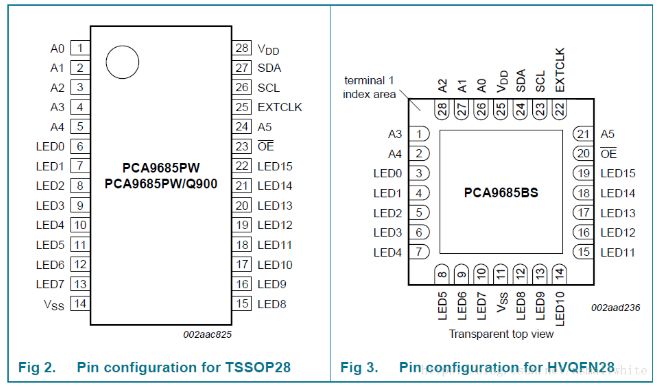
pca9685 参数:
- I2C 接口,支持高达 16 路 PWM 输出,每路 12 位分辨率 (4096 级);
- 内置 25MHz 晶振,可不连接外部晶振,也可以连接外部晶振,最大 50MHz;
- 支持 2.3V-5.5V 电压,最大耐压值 5.5V, 逻辑电平 3.3V;
- 具有上电复位,以及软件复位等功能。
引脚图示:
1. pca 初始化
首先要进行 i2c 初始化:
i2c_init(i2c_id);
导入相关库:
#include "driver/chip/hal_i2c.h"
#define i2c_id 1 # 使用第1个i2c
i2c 初始化函数:
void i2c_init(unsigned int id){
I2C_InitParam initParam;
initParam.addrMode = I2C_ADDR_MODE_7BIT;
initParam.clockFreq = 40000;
if (HAL_I2C_Init(id, &initParam) != HAL_OK) {
printf("i2c init fail!\n");
while(1);
} else {
printf("i2c init success!\n");
}
}
主要是调用 HAL_I2C_Init 函数对第 1 个 i2c 接口进行初始化。
初始化 pca9685:
pca9685_init(60);
pca9685_init 函数:
void pca9685_init(float hz) {
pca_write(pca_mode1, 0x0);
pca_setfreq(hz);
OS_MSleep(500);
}
2. pca 操作
1. pca9685 写寄存器
void pca_write(uint8_t reg_addr, uint8_t data) {
uint8_t buf[1];
buf[0] = data;
HAL_I2C_Master_Transmit_Mem_IT(i2c_id, pca_adrr, reg_addr, I2C_MEMADDR_SIZE_8BIT, buf, 1);
}
2. pca9685 读寄存器
uint8_t pca_read(uint8_t reg_addr) {
uint8_t buf[1];
HAL_I2C_Master_Receive_Mem_IT(i2c_id, pca_adrr, reg_addr, I2C_MEMADDR_SIZE_8BIT, buf, 1);
return buf[0];
}
3. pca9685 设置频率
void pca_setfreq(float freq) {
uint8_t prescale,old_mode,new_mode;
double prescaleval;
freq *= 0.92;
prescaleval = 25000000;
prescaleval /= 4096;
prescaleval /= freq;
prescaleval -= 1;
prescale =(uint8_t)(prescaleval + 0.5f);
old_mode = pca_read(pca_mode1);
new_mode = (old_mode & 0x7F) | 0x10;
pca_write(pca_mode1, new_mode);
pca_write(pca_pre, prescale);
pca_write(pca_mode1, old_mode);
OS_MSleep(2);
pca_write(pca_mode1, old_mode | 0xa1);
}
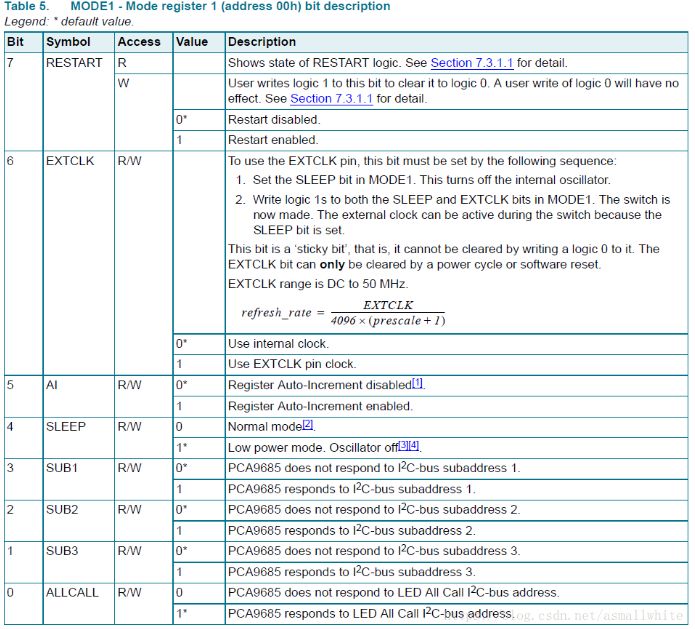
这里的代码不像读函数和写函数一样好理解,主要是一般情况下,在用 pca9685 内置晶振,为 25MHZ,通过配置 PRE_SCALE 寄存器进行配置。如果在舵机控制中,采用内置晶振,取 osc_clock=25000000,update_rate=50 (舵机控制频率 50Hz)。
而且在写 PRESCALE 寄存器的时候,要先设置为 Sleep 模式,也就是将 mode1 寄存器的 SLEEP 标志位设置为 1,具体可参考我上面写的代码。
3. pca 设置 pwm
void pca_setpwm(uint8_t num, uint32_t on, uint32_t off) {
pca_write(LED0_ON_L+4*num,on);
pca_write(LED0_ON_H+4*num,on>>8);
pca_write(LED0_OFF_L+4*num,off);
pca_write(LED0_OFF_H+4*num,off>>8);
}
pwm 通道寄存器如下图:
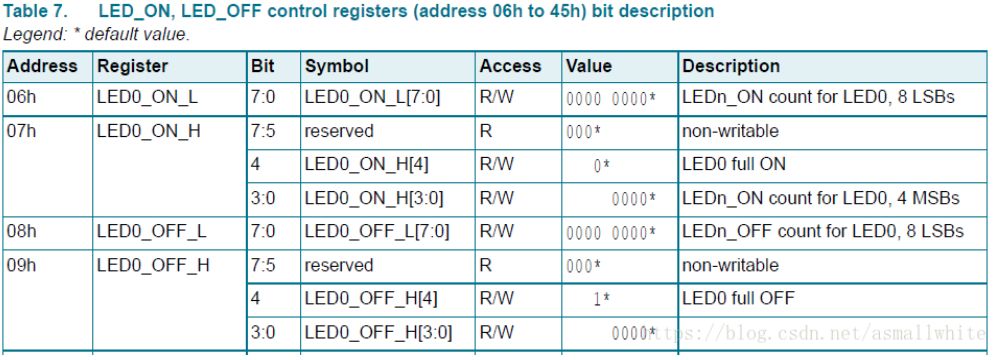
由图可知,对于每一个通道,有 4 个寄存器,在设置 PWM 占空比的时候,首先配置舵机的示例如下图所示 (ON < OFF 的情况):
狗子运行图:
核心代码:
#include <stdio.h>
#include "ohos_init.h"
#include "kernel/os/os.h"
// #include "iot_i2c.h"
#include "driver/chip/hal_i2c.h"
#include "iot_errno.h"
#include "math.h"
#define i2c_id 1
#define pca_adrr 0x40 // pca9685设备地址
#define pca_mode1 0x0
#define pca_pre 0xFE
#define LED0_ON_L 0x6
#define LED0_ON_H 0x7
#define LED0_OFF_L 0x8
#define LED0_OFF_H 0x9
static OS_Thread_t g_main_thread;
void pca_write(uint8_t reg_addr, uint8_t data) {
uint8_t buf[1];
buf[0] = data;
HAL_I2C_Master_Transmit_Mem_IT(i2c_id, pca_adrr, reg_addr, I2C_MEMADDR_SIZE_8BIT, buf, 1);
}
uint8_t pca_read(uint8_t reg_addr) {
uint8_t buf[1];
HAL_I2C_Master_Receive_Mem_IT(i2c_id, pca_adrr, reg_addr, I2C_MEMADDR_SIZE_8BIT, buf, 1);
return buf[0];
}
void pca_setfreq(float freq) {
uint8_t prescale,old_mode,new_mode;
double prescaleval;
freq *= 0.92;
prescaleval = 25000000;
prescaleval /= 4096;
prescaleval /= freq;
prescaleval -= 1;
prescale =(uint8_t)(prescaleval + 0.5f);
old_mode = pca_read(pca_mode1);
new_mode = (old_mode & 0x7F) | 0x10;
pca_write(pca_mode1, new_mode);
pca_write(pca_pre, prescale);
pca_write(pca_mode1, old_mode);
OS_MSleep(2);
pca_write(pca_mode1, old_mode | 0xa1);
}
void pca_setpwm(uint8_t num, uint32_t on, uint32_t off) {
pca_write(LED0_ON_L+4*num,on);
pca_write(LED0_ON_H+4*num,on>>8);
pca_write(LED0_OFF_L+4*num,off);
pca_write(LED0_OFF_H+4*num,off>>8);
}
void pca9685_init(float hz) {
pca_write(pca_mode1, 0x0);
pca_setfreq(hz);
OS_MSleep(500);
}
void pca_rotate(uint8_t num,uint8_t angle) {
uint32_t off=0;
off=floor(angle * 2 + angle / 5 + 158);
pca_setpwm(num, 0, off);
}
void i2c_init(unsigned int id){
I2C_InitParam initParam;
initParam.addrMode = I2C_ADDR_MODE_7BIT;
initParam.clockFreq = 40000;
if (HAL_I2C_Init(id, &initParam) != HAL_OK) {
printf("i2c init fail!\n");
while(1);
} else {
printf("i2c init success!\n");
}
}
static void MainThread(void *arg) {
uint8_t i = 0;
i2c_init(i2c_id);
pca9685_init(60);
printf("i2c and pca9685 init done.\n");
while(1){
pca_rotate(0, 0);
OS_MSleep(1000);
pca_rotate(0, 180);
OS_MSleep(1000);
}
}
void PCAMain(void) {
printf("PCA9685 Motor Start.\n");
if (OS_ThreadCreate(&g_main_thread, "MainThread", MainThread, NULL,
OS_THREAD_PRIO_APP, 10 * 1024) != OS_OK) {
printf("[ERR] Create MainThread Failed\n");
}
}
SYS_RUN(PCAMain);
狗子的相关步态算法还在调试,使用的舵机是 MG90S,走得还不是很流畅,狗腿子会抖,后面需要继续调试,而且供电也是个大问题,不过已经焊了个供电模块稍微解决了,后面还要给狗子加个壳。

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)