
CVPR 2023 | IGEV:双目立体匹配网络新SOTA!
作者|派派星 编辑| CVHub点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷干货,即可获取点击进入→自动驾驶之心【深度估计】技术交流群Title: Iterative Geometry Encoding Volume for Stereo MatchingPaper: https://arxiv.org/pdf/2303.06615.pdfCode: https://github.c...
作者 | 派派星 编辑 | CVHub
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【深度估计】技术交流群
Title: Iterative Geometry Encoding Volume for Stereo Matching
Paper: https://arxiv.org/pdf/2303.06615.pdf
Code: https://github.com/gangweiX/IGEV
导读
RAFT在立体匹配任务中显示出了巨大的潜力。然而,其使用的All-pairs Correlations缺乏非局部几何知识,难以处理病态区域(如遮挡、重复纹理、低纹理、高反等区域)的局部歧义。
本文中,作者提出了Iterative Geometry Encoding Volume(IGEV),一种新的立体匹配的深度网络体系结构。提出的IGEV-Stereo构建了一个Combined Geometry Encoding Volume,该Volume编码几何和上下文信息以及局部匹配细节,并迭代地对其进行索引以更新视差图。为了加快收敛速度,作者利用GEV回归出ConvGRUs迭代的准确初值。
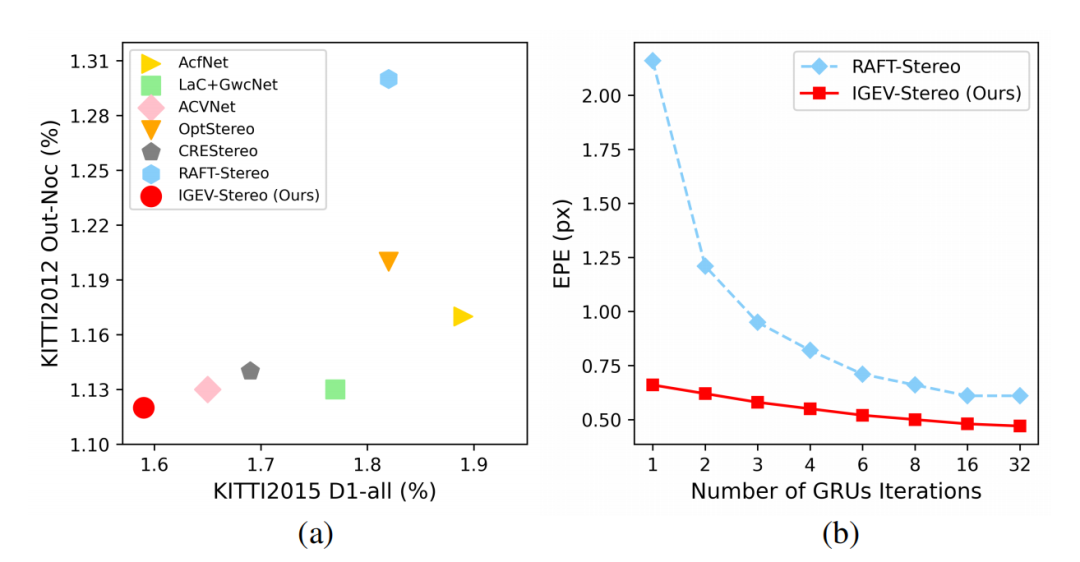
IGEV-Stereo在KITTI 2015和2012(Reflective)中在所有发布的方法中排名第一(如上图所示),是前10个方法中最快的。此外,IGEV-Stereo具有较强的跨数据集泛化性和较高的推理效率。作者还将IGEV扩展到Multi-View Stereo(MVS),即IGEV-MVS,它在DTU基准测试上实现了具有竞争力的精度。
贡献
现有的先进的双目立体匹配方法,主要分为基于代价滤波的方法以及基于迭代优化的方法(以RAFT为代表)。前者可以在cost volume中编码足够的非局部几何和上下文信息,这对于具有挑战性的区域中的视差预测至关重要。后者可以避免进行3D代价聚合所需的高计算和内存成本,但是仅基于All-pairs Correlations的方法在病态区域的能力较弱。

为了结合这两种方法的互补优势,论文提出了一种新的立体匹配范式——迭代几何编码体 (Iterative Geometry Encoding Volume, IGEV-Stereo)(如上图所示),其结合了更全面和精炼的几何和上下文信息,论文的主要贡献如下:
为了解决病态区域引起的模糊性问题。论文使用一个极轻量级的3D正则化网络对cost volume进行聚合和正则化,得到一个几何编码体(GEV)(结果如上图c所示),与RAFT-Stereo的All-pairs Correlations(结果如上图b所示)相比,GEV在聚合后编码了更多的场景几何和上下文信息。
为了解决边界和微小细节处出现过度平滑的情况。论文将GEV和RAFT中的All-pairs Correlations相结合,形成了组合几何编码体 (Combined Geometry Encoding Volume, CGEV),并输入到 ConvGRU-based update operator 中进行迭代视差图优化(结果如上图d所示)。
方法
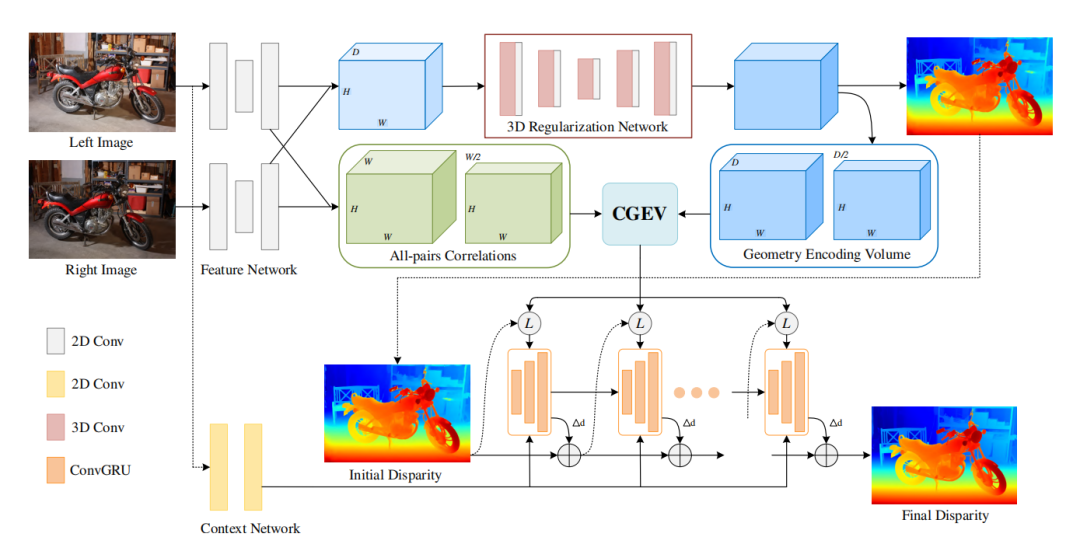
IGEV-Stereo它由一个多尺度feature extractor,一个Combined Geometry Encoding Volume,一个基于ConvGRU的Update Operator,以及一个Spatial Upsampling模块组成。
Feature Extractor
特征提取器包括两部分:
特征网络,提取多尺度特征用于cost volume构建和指导代价聚合
上下文网络,提取多尺度上下文特征用于ConvGRUs隐藏状态初始化和更新
Feature Network
论文使用在ImageNet上预训练的MobileNet V2将输入图降采样到1/32,然后通过上采样得到多尺度特征:

其中 和 用于构建cost volume
Context Network
同RAFT-Stereo一样,上下文网络由一系列残差块和下采样层组成,在输入128个通道图像分辨率的1/4、1/8和1/1/16处产生多尺度上下文特征。多尺度上下文特征用于初始化基于ConvGRU的更新操作符的隐藏状态,并在每次迭代时插入到ConvGRU中。
Combined Geometry Encoding Volume
拿到和,沿着通道维度将特征划分为组,并逐组计算correlation maps,构建一个4维的group-wise correlation volume:

仅基于特征相关性的cost volume 缺乏捕获全局几何结构的能力。(按照传统的立体匹配算法,此时需进行代价聚合)。为了解决这个问题,论文进一步使用轻量级的三维正则化网络进一步处理,得到geometry encoding volume :

三维正则化网络 基于一个轻量级的3D UNet,它由三个下采样块和三个上采样块组成。首先论文遵循CoEx的方法,它用从参考图像(左图)的特征图计算的权重来激活cost volume的channels,以进行代价聚合,得到的guided cost volume表示为:

是sigmoid激活函数,是哈达玛积(Hadamard Product)。三维正则化网络 插入到guided cost volume的激活操作中,可以有效地推断和传播场景全局几何信息,从而得到geometry encoding volume 。同时,论文还计算了相应的左右特征之间的all-pairs correlations(APC),以得到局部特征相关性。
为了增大感受野,论文使用kernel size大小为2、stride为2的1D average pooling来池化视差维度,形成一个两层的特征金字塔和all-pairs correlation 特征金字塔。然后将和结合起来,形成一个组合的combined geometry encoding volume。
ConvGRU-based Update Operator
给ConvGRU-based Update Operator提供了一个更好的初始视差能够使得迭代视差优化更快地收敛。
论文使用soft argmin从geometry encoding volume 中回归出一个初始化视差:

其中 是1/4分辨率的视差index。从初始化的输入视差开始,论文使用三级ConvGRUs来迭代地更新视差。使用多尺度context features初始化三级ConvGRUs的隐状态(hidden state)。
对于每次迭代,论文使用当前的视差,通过线性插值对combined geometry encoding volume进行索引,生成一组几何特征。计算表示为:
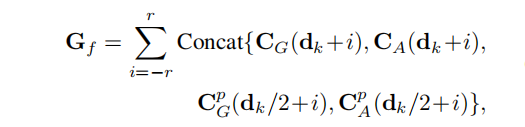
其中,为索引半径,表示池化操作。这些几何特征和当前的视差预测通过两个编码器层,然后与连接形成。然后使用ConvGRUs更新隐藏状态
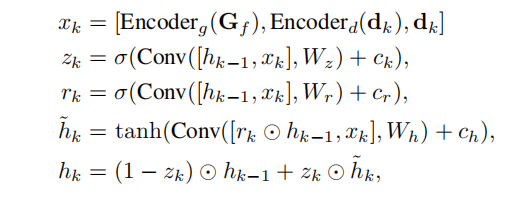
这里,、、是由上下文网络生成的上下文特征。基于隐藏状态,论文通过两个卷积层得到视差残差,然后更新当前的视差:

Spatial Upsampling
论文利用了在1/4分辨率下预测的视差,通过加权组合来生成完整分辨率的视差图
Loss Function


实验
消融实验
Effectiveness of CGEV
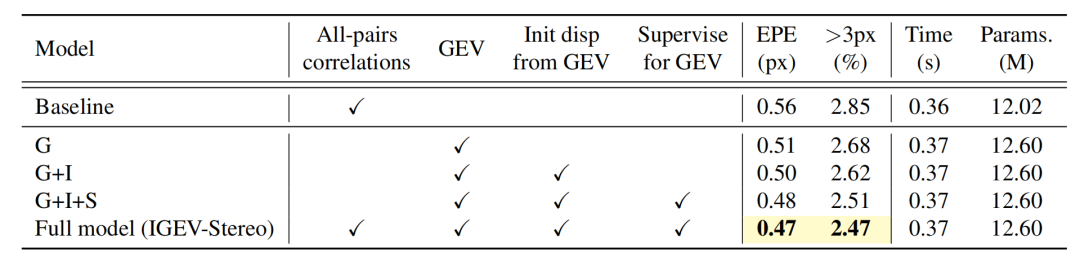
如表1所示,论文所提出的 geometry encoding volume(GEV)可以显著提高预测精度,因为GEV可以提供非局部信息和场景先验知识。为了补充局部相关性,论文结合了GEV和all-pairs correlations,形成了一个combined geometry encoding volume(CGEV),表示为IGEV-Stereo,性能最好。
Number of Iterations
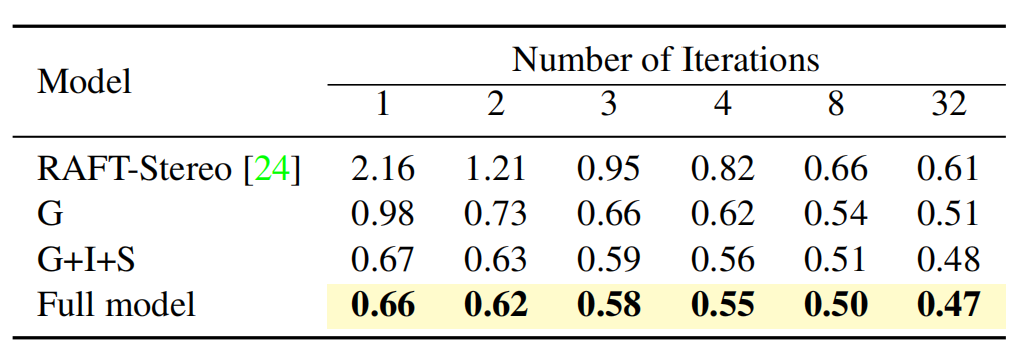
如表2所示,IGEV-Stereo即使经过很少的迭代,也已经达到了最先进的性能,使用户能够根据他们的需要来权衡时间效率和性能。
Configuration Exploration
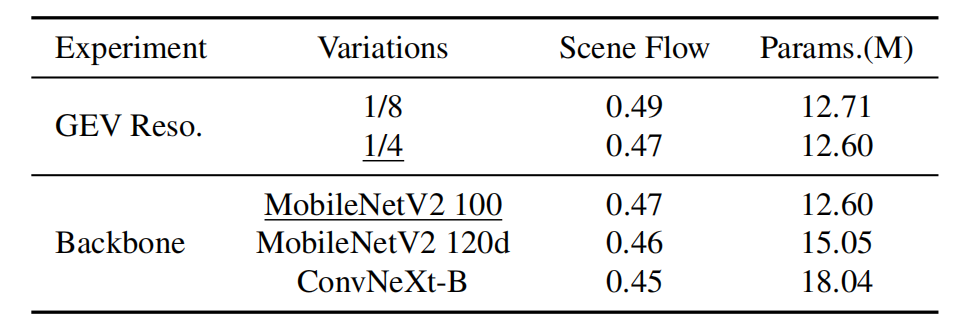
如表3所示,即使构建一个1/8分辨率的GEV,只需要额外的5ms,论文的方法仍然在Scene Flow上实现了最先进的性能。当使用具有更多参数的backbone时,即MobileNetV2 120d和ConvNeXt-B,性能可以得到提高。
Comparisons with State-of-the-art

如表4所示,在Scene Flow上,IGEV-Stereo实现了新的SOTA EPE 0.47。
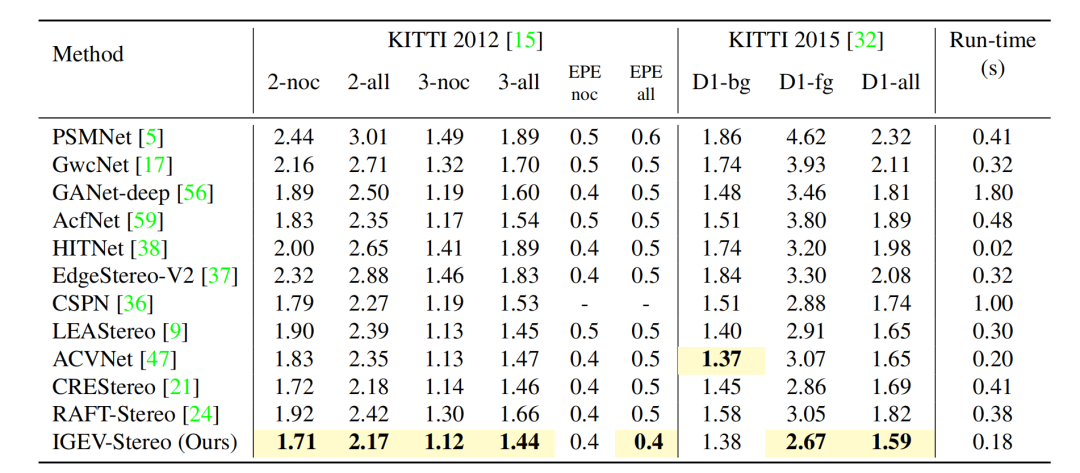
如表5所示,IGEV-Stereo在KITTI 2012和2015上的几乎所有指标都获得了最好的性能。在撰写本文时,IGEV-Stereo在KITTI 2015上实现SOTA。与其他基于迭代的方法如CREStereo和RAFT-Stereo相比,IGEV-Stereo不仅性能优于他们,而且还快了2×。
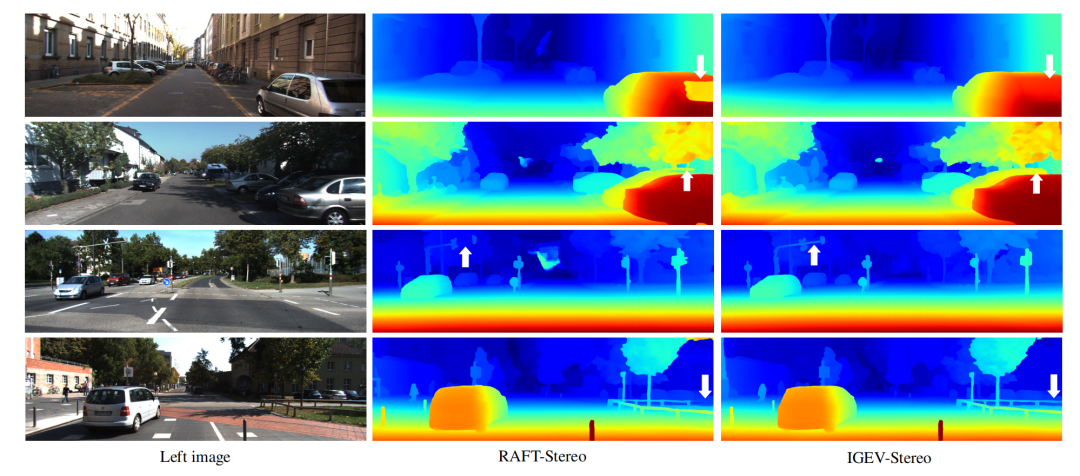
如上图所示,IGEV-Stereo在高反、无纹理和细节的区域中表现得非常好。
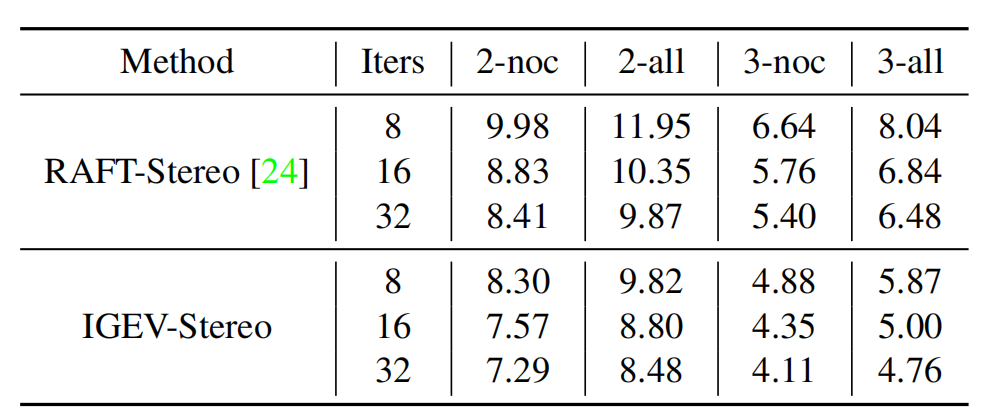
如表6所示,IGEV-Stereo在KITTI 2012的反射区域排行榜上排名第一,其表现远远优于RAFT-Stereo,IGEV-Stereo只使用8次迭代就比使用32次迭代的RAFT-Stereo性能更好
Zero-shot Generalization
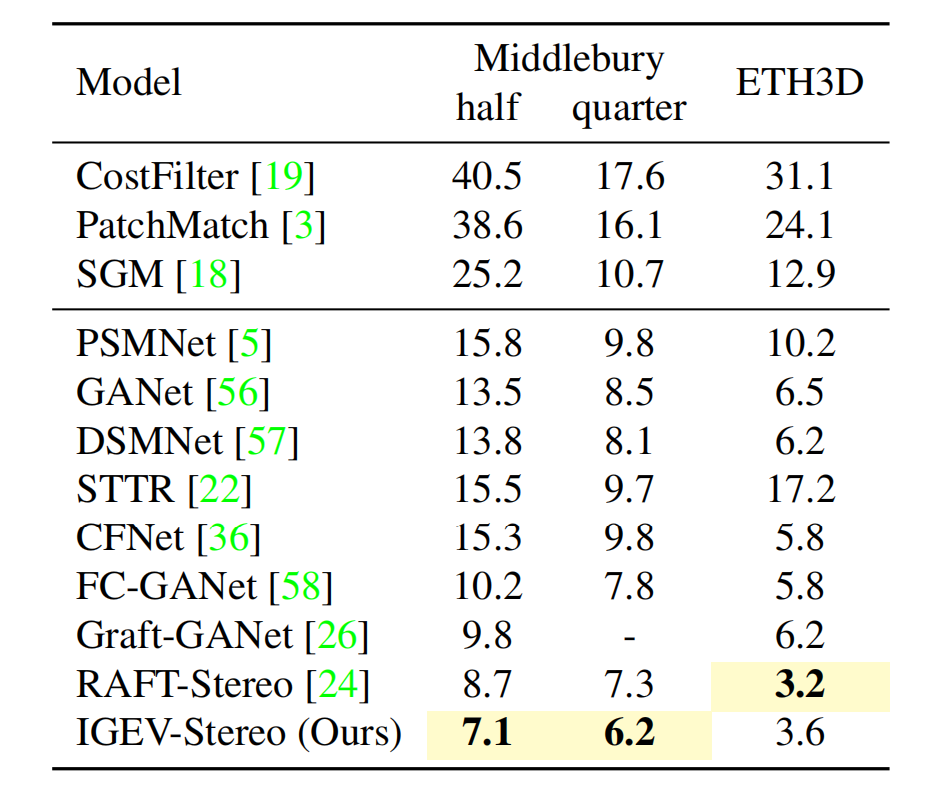
论文评估了IGEV-Stereo从合成数据集到看不见的真实场景的泛化性能。论文在合成的Scene Flow数据集上训练IGEV-Stereo,并直接在真实的Middlebury 2014和ETH3D训练集上进行测试。如表7所示,IGEV-Stereo在相同的zero-shot设置下实现了最先进的性能。
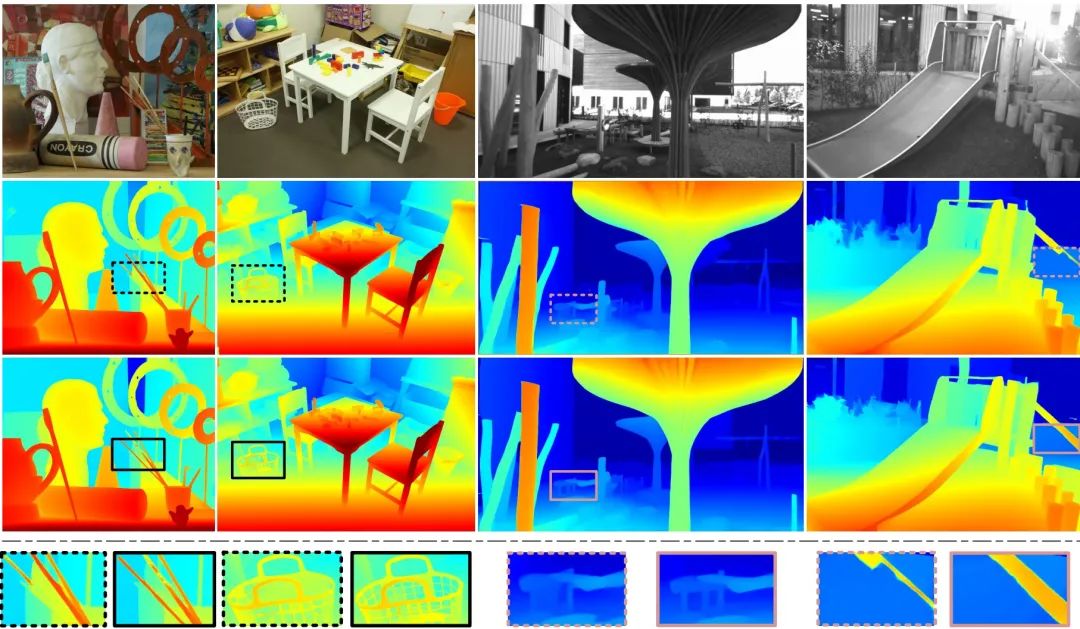
如上图所示,与RAFT-Stereo的视觉比较,IGEV-Stereo对无纹理和细节的区域更鲁棒。
Extension to MVS
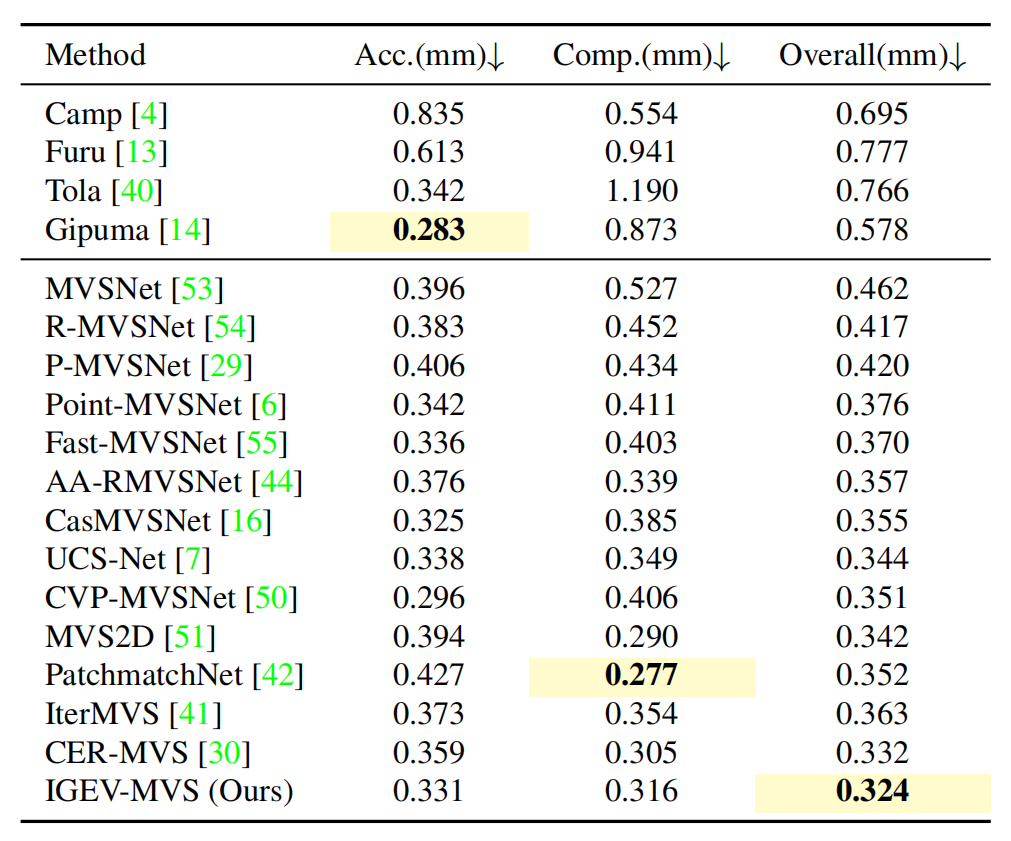
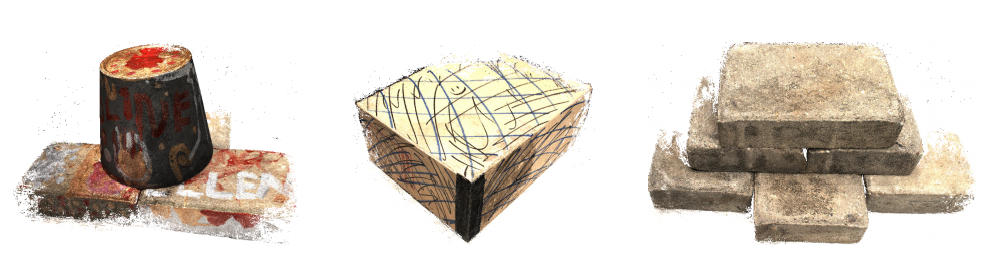
论文将IGEV扩展到multi-view stereo(MVS),即IGEV-MVS,在室内多视角立体数据集DTU benchmark进行评估。如表8所示,IGEV-MVS获得了最好的总体分,这是完整性和准确性的平均值。
总结
本文提出了Iterative Geometry Encoding Volume(IGEV),这是一种用于立体匹配和多视角立体视觉也的深度网络架构。IGEV构建一个combined geometry encoding volume编码几何和上下文信息以及局部匹配细节,并迭代地对其进行索引以更新视差图。IGEV-Stereo在KITTI 2015 leaderboard中排名第一,并实现了最先进的跨数据集泛化能力。拓展的IGEV-MVS在DTUbenchmark上也取得了具有竞争力的性能。
论文使用一个轻量级的3D CNN来过滤cost volume并获得GEV。然而,当处理显示出较大视差范围的高分辨率图像时,使用3D CNN来处理由此产生的大尺寸 cost volume仍然会导致较高的计算和内存成本。未来的工作包括设计一个更轻量级的正则化网络。此外,论文还将探索利用cascaded cost volumes,使本文的方法适用于高分辨率图像。
往期回顾
史上最全综述 | 3D目标检测算法汇总!(单目/双目/LiDAR/多模态/时序/半弱自监督)
视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)

(扫码学习最新视频)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 3
3 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)