
MIT Cheetah开源代码仿真环境搭建
MIT Cheetah开源代码仿真环境搭建
MIT Cheetah开源代码仿真环境搭建
参考文章:长乐未央https://zhuanlan.zhihu.com/p/537013183
背景介绍:
电脑系统:Ubuntu18.04
ROS版本: ROS Melodic
一、安装依赖项
首先更新一下
sudo apt update
sudo apt upgrade
安装依赖项
sudo apt install mesa-common-dev freeglut3-dev coinor-libipopt-dev libblas-dev liblapack-dev gfortran liblapack-dev coinor-libipopt-dev cmake gcc build-essential libglib2.0-dev
二、安装QT5
首先是QT5.14.2,下载地址友情链接:QT5.14.2
下载完成后选中下载的QT5文件,右键点击属性,点击权限,勾选允许作为程序执行文件,如下图所示:

然后在该文件夹右键打开终端,在终端输入以下命令打开QT5安装界面(注意,下面命令中qt-opensource-linux-x64-5.14.2.run应当为你实际下载的QT5文件名):
./qt-opensource-linux-x64-5.14.2.run
我们会看到如下图所示界面,点击next即可:
接下来会看到下图所示界面,需要我们输入QT账号,没有的话就去官网注册一个,输入号账号后点击next。
下一步中勾选 I have read and approve the obligations of using Open Source QT前的方框,然后点击下一步。
在点击下一步
接下来我们来到了选择QT安装目录界面,可更改安装路径
接下来选择安装的QT组件,如下图所示,点击全选,然后点击下一步。
下一步中勾选I have read and agree to the terms contained in the license agreements.前的圆框,然后点击下一步
接下来点击安装即可开始安装。
如下图所示,安装完成后,去掉Launch QT Creator前的勾勾,然后点击完成即可,至此,QT5安装完成。

三、安装LCM
首先是下载LCM安装包,下载链接:lcm-1.4.0
作者是在windows下载好拷过去的
蓝奏云链接:lcm-1.4.0
在此先将下载的压缩包复制到home下,然后右键文件夹打开终端,输入
sudo gunzip 文件名
再在home文件夹下创建lcm-1.4.0-build文件
点击lcm-1.4.0-build文件夹右键打开终端
输入
mkdir build
cd build
cmake ..lcm-1.4.0
make
sudo make install
sudo ldconfig
这里也可以用其他方式安装好。
注:作者sudo ldconfig时报错:不是符号连接
详情见:sudo ldconfig时报错:不是符号连接
解决方式:打开依赖包文件夹 cd /usr/lib
会发现有重复的包,有了so.0后面还会出现多余的so.1之类的就是多余的包,参考报错的目录文件
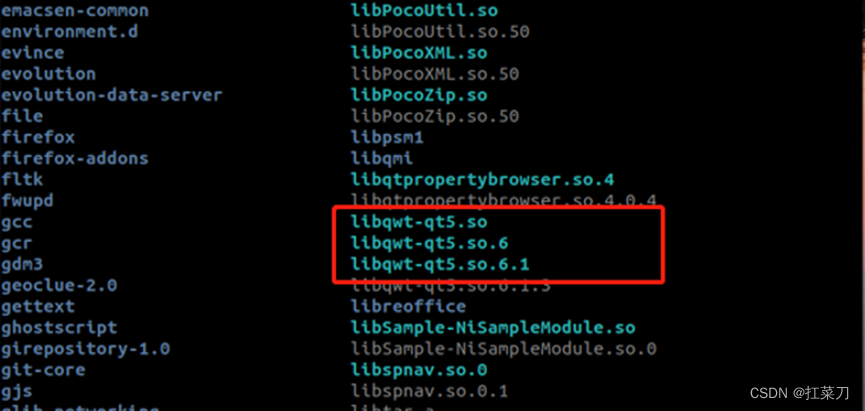
删除就OK
rm+文件名
四、安装Eigen3.3.6
只能使用3.3.6版本的eigen
Eigen3.3.6下载链接:Eigen3.3.6
下载完成后安装,安装方式跟lcm安装一致,这里不再做介绍
五、下载和编译MIT Cheetah源码
首先下载MIT Cheetah的源码,github下载链接:MIT Cheetah的源码
蓝奏云链接:MIT Cheetah的源码
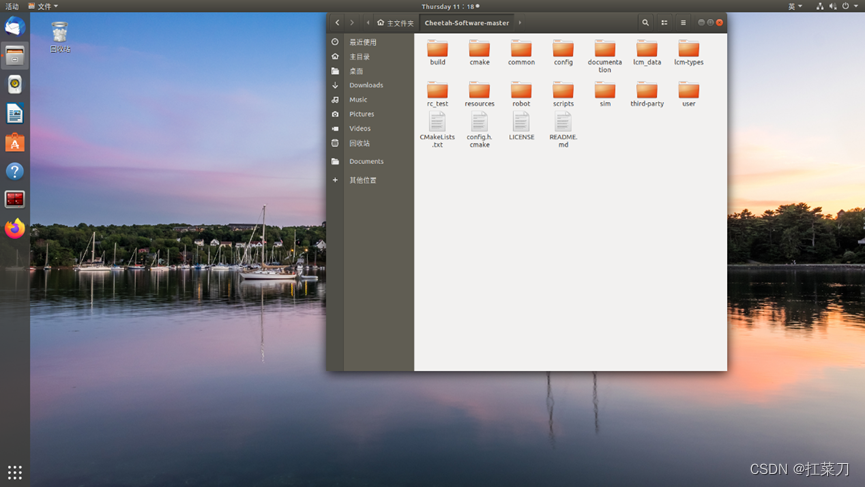
下载完成后打开压缩包所在文件夹,然后解压,进入解压后的文件夹Cheetah-Software-master,我们记此文件夹为MIT主文件夹(后面用到,记住),文件夹内容如下图所示:
下面进行两项修改
1):打开mit主文件夹下的common文件夹下的CMakeLists.txt文件,修改下图圈圈中的master为main。
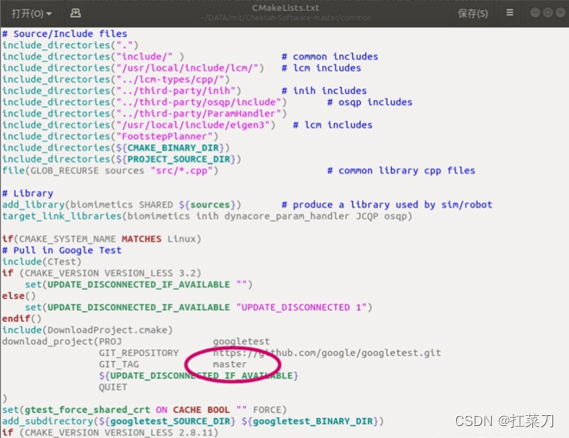
修改后保存退出。
2):打开mit主文件夹下的sim文件夹下的CMakeLists.txt文件,打开后如下图所示,在圈圈中添加有关内容。
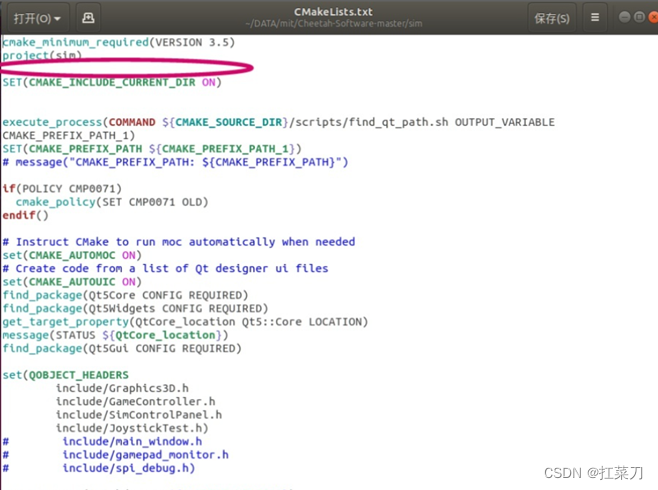
添加内容如下图和代码框所示,下图中选中内容为需要删除内容。
#以下内容切勿复制粘贴!!!
set(CMAKE_PREFIX_PATH /home/xiao/Qt5.14.2/5.14.2/gcc_64)
set(QT5Core_DIR/home/xiao/Qt5.14.2/5.14.2/gcc_64/lib/cmake/QT5Core)
set(QT5Widgets_DIR/home/xiao/Qt5.14.2/5.14.2/gcc_64/lib/cmake/QT5Widgets) set(QT5Gamepad_DIR/home/xiao/Qt5.14.2/5.14.2/gcc_64/lib/cmake/QT5Gamepad)
#删除上图选中的内容,即删除SET(CMAKE_PREFIX_PATH ${CMAKE_PREFIX_PATH_1})
解释一下添加的内容,其中/home/xiao/为之前让记录的QT安装路径,5.14.2为QT安装路径下的文件夹,读者在此路径下应当可以找到这个5.14.2文件夹(然后输入pwd查看安装路径),读者应当根据实际安装路径进行修改,切勿复制粘贴。
最后记得保存退出。
到此处两项修改完成,下面进行代码编译。
首先进入到mit主文件夹(前文说过)下的scripts文件夹,在空白处右键在终端打开,复制下方命令执行。
./make_types.sh
此处会提示一些错误,类似无法删除,没有那个文件或目录之类的,无视就行。
再次进入到mit主文件夹,在空白处右键在终端打开,复制下方命令执行(建议一条一条地执行)。
mkdir build
cd build
cmake ..
make -j4
提示:在执行cmake …命令时,可能会卡在某个步骤
这个步骤跟谷歌有关,如果没有梯子的话,那就只能随缘了,作者时两天后意外编译成功了
最后的make -j4是指利用双核心进行编译,如果你的电脑不支持,可以用make指令替代make -j4,只不过编译速度会变慢。
六、仿真的使用
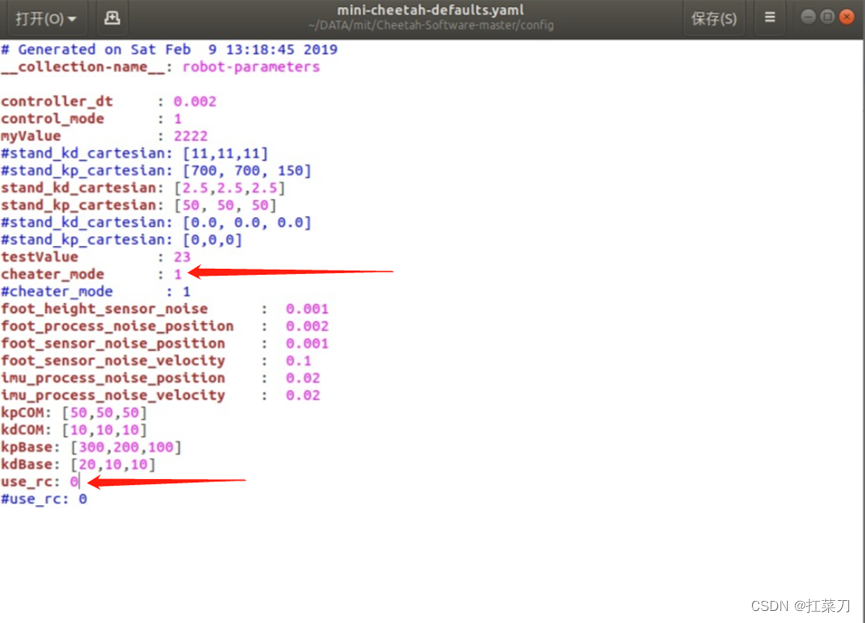
在编译完成后,我们进入到mit主文件夹下的build文件夹下的config文件夹,打开mini-cheetah-defaults.yaml文件,修改control_mode和cheater_mode为1,修改use_rc为0,修改后如下图所示,最后保存并退出。
后面才是仿真的使用
接下来打开机器人仿真,在这之前,需要用游戏手柄连接电脑,没有就算了,接好之后,我们进入到mit主文件夹下的build文件夹下(有时直接进到sim里会打不开仿真,因此不要再进入sim文件夹了),在空白处右键在终端打开,复制下方命令执行。
./sim/sim
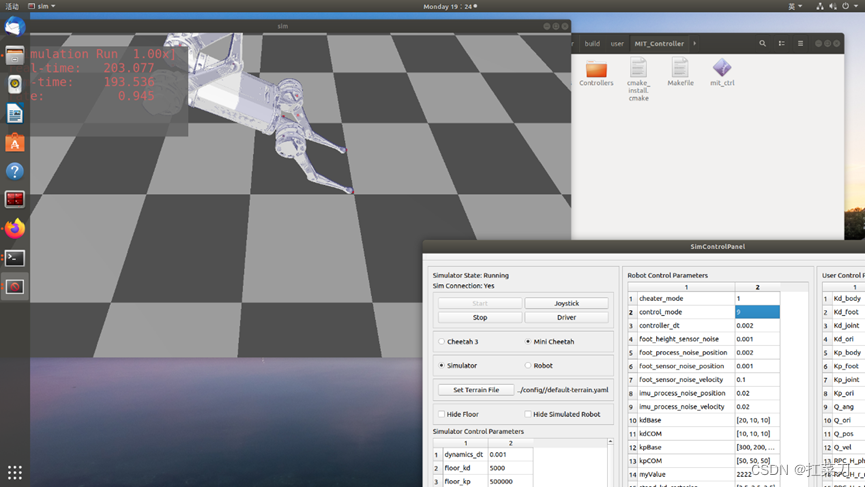
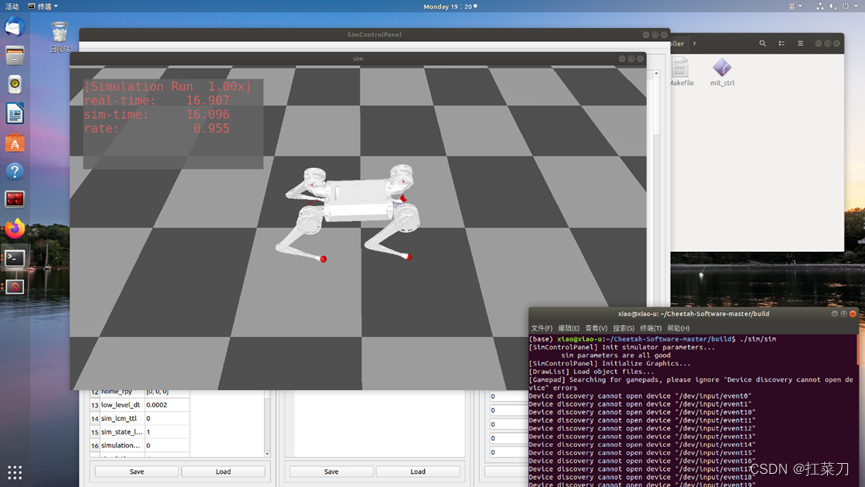
此时我们会见到下图所示的界面,该界面为机器人仿真控制界面:
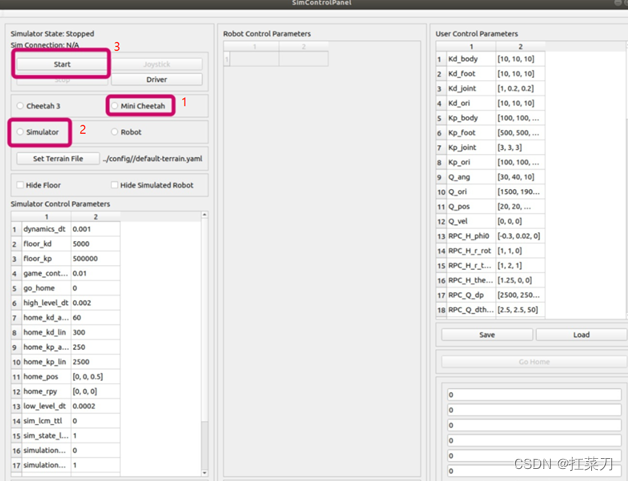
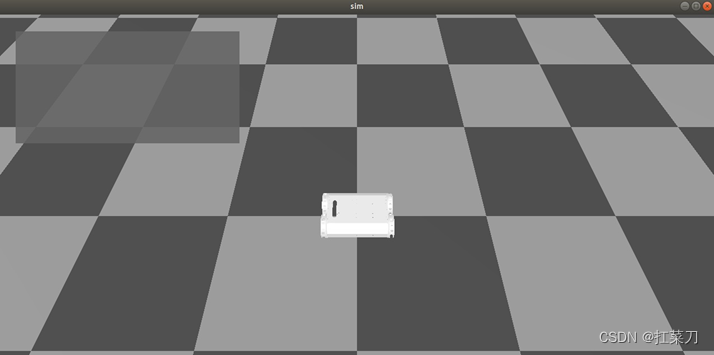
先点击Mini Cheetah和Simulator,然后点击Start,将会出现下图所示界面,该界面为机器人仿真界面:
接下来打开机器人控制器,此时我们再次进入mit主文件夹下的build文件夹下的user文件夹下的MIT_Controller文件夹,在空白处右键在终端打开,复制下方命令执行。
./mit_ctrl m s
上面代码中,mit_ctrl为编译得到的可执行文件,m的含义为mini cheetah模型,s的含义为simulate,即仿真。
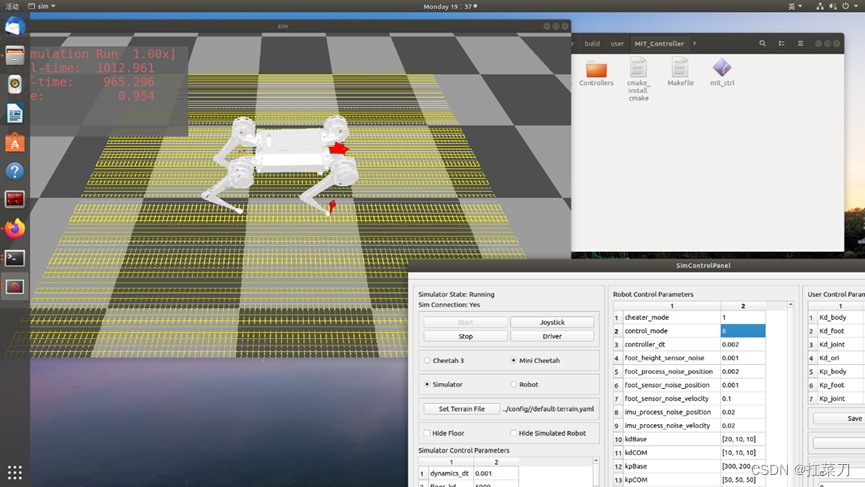
此时,在仿真中应当可以看到机器人站起来,我们再次切换到下图的界面,同时修改圈圈中的**control_mode值为4,**此时应当可以看到仿真中的机器人切换到了trot步态。
此时可以控制机器人运动,通过游戏手柄的摇杆可以进行机器人的运动速度的控制,请读者自行探索。这里介绍一下后空翻怎么操作:首先修改上图的仿真控制界面的圈圈中的control_mode值为3,可以观察到机器人原地站立,这时我们再修改control_mode值为9,可以观察到仿真中机器人将会进行后空翻,待完成后空翻后再次修改control_mode值为3,然后再修改control_mode值为9就可以再进行后空翻。
control_mode值为8时时前进后退
如果在操作过程中机器人倒下了,可以点击上图仿真控制界面的Go Home按钮恢复原位,若无法恢复,则需要重新打开仿真和控制器。
至此,仿真环境搭建完成,谢谢阅读!

鸿蒙生态一站式服务平台。
更多推荐

 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)