机器人学基础--位形空间(一)
机器人学基础--位形空间--自由度的计算
机器人学基础--位形空间
机器人学基础
一、位形空间
1.1 刚体的自由度
(1)机器人在哪?
位形(Configuration):机器人身上所有的点的位置。
位形空间(C-sapce):表示所有位形的空间。
C-sapce维度就是机器人自由度(dof),也是表达位形所需最少的实数个数。
(2)如何计算机器人自由度?
机器人由刚性连杆(刚体)构成,通过关节连接,所以组成机器人的刚体自由度就是机器人自由度。
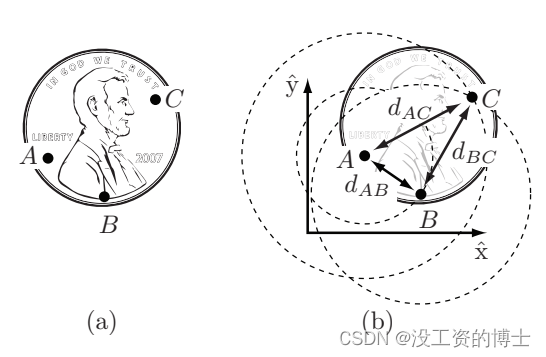
(3)二维空间刚体自由度
step1:选择平面上一个点
A
(
x
a
,
y
a
)
A(x_a, y_a)
A(xa,ya).
step2:再选择平面上一点
B
(
x
b
,
y
b
)
B (x_b, y_b)
B(xb,yb),因为是刚体所以AB之间距离
d
A
B
d_{AB}
dAB 恒定,所以点B必须位于以A为圆心,以
d
A
B
d_AB
dAB 为半径的圆上。这就给点B增加了1个独立约束。
step3:再选择平面上一点
C
(
x
C
,
y
C
)
C (x_C, y_C)
C(xC,yC),因为是刚体所以AC,BC之间距离
d
A
C
,
d
B
C
d_{AC},d_{BC}
dAC,dBC恒定,所以点C必须位于以A为圆心,以
d
A
C
d_{AC}
dAC为半径的圆和以B为圆心,以
d
B
C
d_{BC}
dBC为半径的圆上。这就给点C增加了2个独立约束。

(4)3维空间刚体自由度
step1:选择平面上一个点
A
(
x
a
,
y
a
,
z
a
)
A(x_a, y_a, z_a)
A(xa,ya,za).
step2:再选择平面上一点
B
(
x
b
,
y
b
,
z
b
)
B (x_b, y_b, z_b)
B(xb,yb,zb),因为是刚体所以AB之间距离d_AB 恒定,所以点B必须位于以A为球心,以
d
A
B
d_{AB}
dAB为半径的球面上。这就给点B增加了1个独立约束。
step3:再选择平面上一点
C
(
x
C
,
y
C
,
z
C
)
C (x_C, y_C,z_C)
C(xC,yC,zC),因为是刚体所以AC,BC之间距离
d
A
C
,
d
B
C
d_{AC},d_{BC}
dAC,dBC 恒定,所以点C必须位于以A为球心,以
d
A
C
d_{AC}
dAC 为半径的球面和以B为球心,以
d
B
C
d_{BC}
dBC 为半径的圆面上。这就给点C增加了2个独立约束。
step4:再选择平面上一点
D
(
x
C
,
y
C
,
z
C
)
D (x_C, y_C,z_C)
D(xC,yC,zC),点C增加了3个独立约束。
dof=质点的自由度之和-质点的独立约束之和
=9-3=6
同理四维空间刚体自由度为10


1.2 机器人的自由度
机器人是由刚性连杆(刚体)构成,通过关节连接。对于一个没有约束的刚体而言,在平面上dof为3,三维空间自由度为6。如果使用关节对机器人进行连接,则刚体往往会受到关节的约束。所以机器人的自由度dof:

(1) 了解一下常用关节的自由度:


(2)Grubler公式
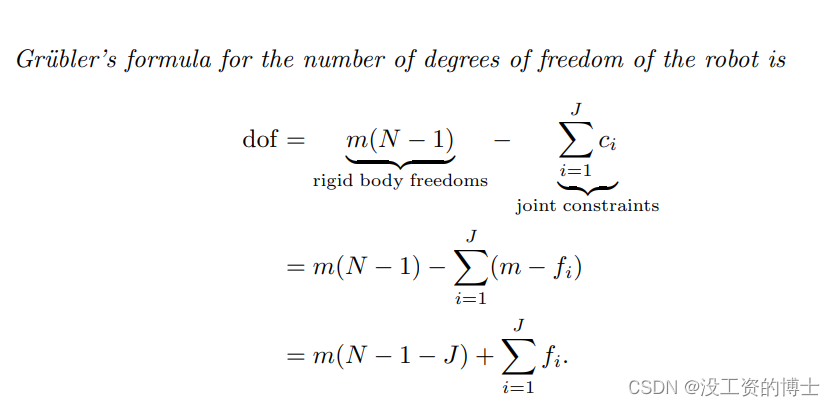
m为自由度数
N为包含基座的构件个数
J为关节数
c
i
c_i
ci为关节提供的独立约束个数
f
i
f_i
fi 为关节的自由度数
注:每一个关节都是独立的。如果关节的约束不是相互独立,Grubler提供的是自由度数目是一个下界。
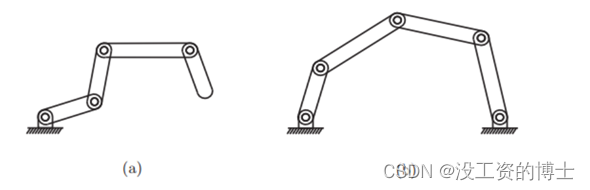
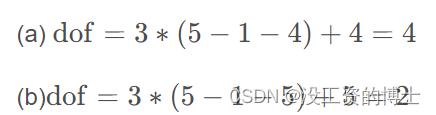
(3)两个小例子
参考链接: https://www.guyuehome.com/36940
参考链接:https://www.bilibili.com/video/BV1KV411Z7sC/?p=4

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)