机器人学基础(一):空间描述与坐标变换
位置和姿态的描述1.位置描述对于直角坐标系{A},空间任一点p的位置可以用3x1的列矢量Ap来表示。2.方位描述3.位姿描述实际上同时描述位置和姿态,上面讲了用位置矢量和旋转矩阵来描述,这样,刚体B的位姿可以用坐标系{B}来描述:坐标变换1.平移坐标变换2.旋转坐标变换[ ][ ][ ]b坐标原点相同,但两者方位不同最一般的情形:两坐标系原点既不重合,也不相同。(复合变换)齐次坐标变换*首先了解什
位置和姿态的描述
1.位置描述
对于直角坐标系{A},空间任一点p的位置可以用3x1的列矢量Ap来表示。

2.方位描述

3.位姿描述
实际上同时描述位置和姿态,上面讲了用位置矢量和旋转矩阵来描述,这样,刚体B的位姿可以用坐标系{B}来描述:
坐标变换
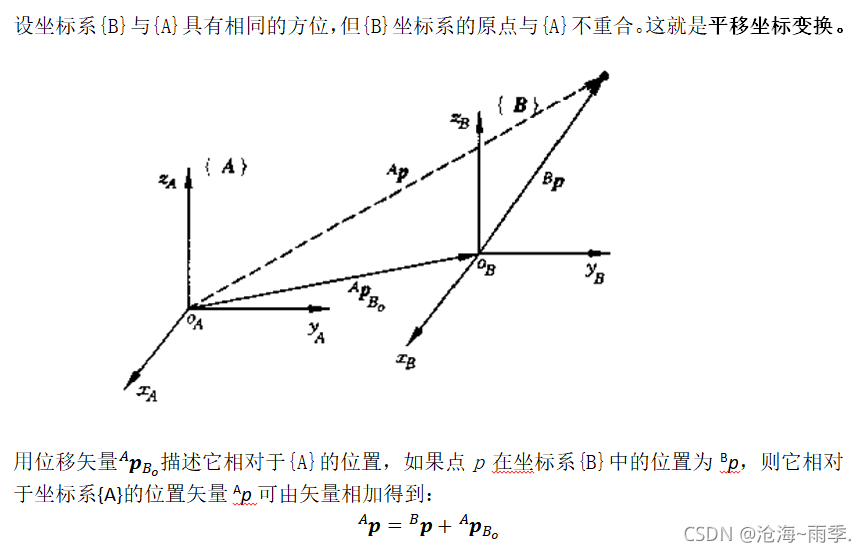
1.平移坐标变换
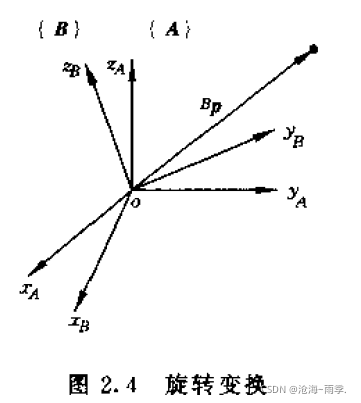
2.旋转坐标变换
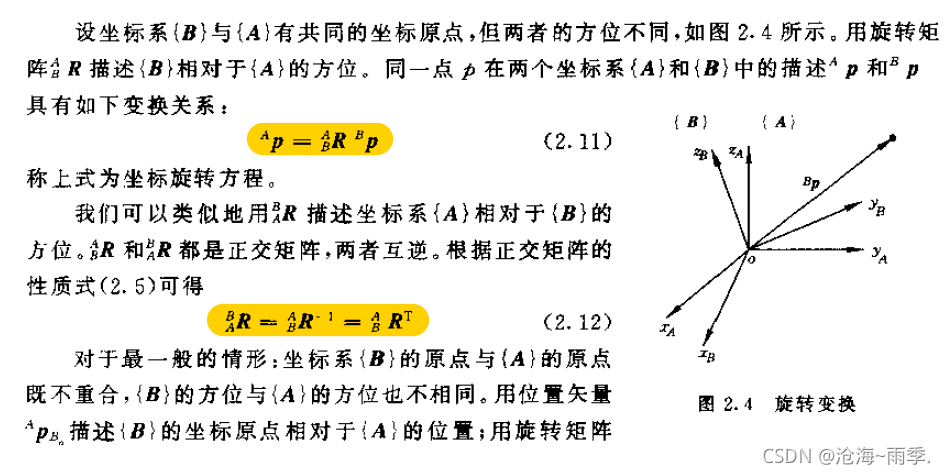
- 坐标原点相同,但两者方位不同
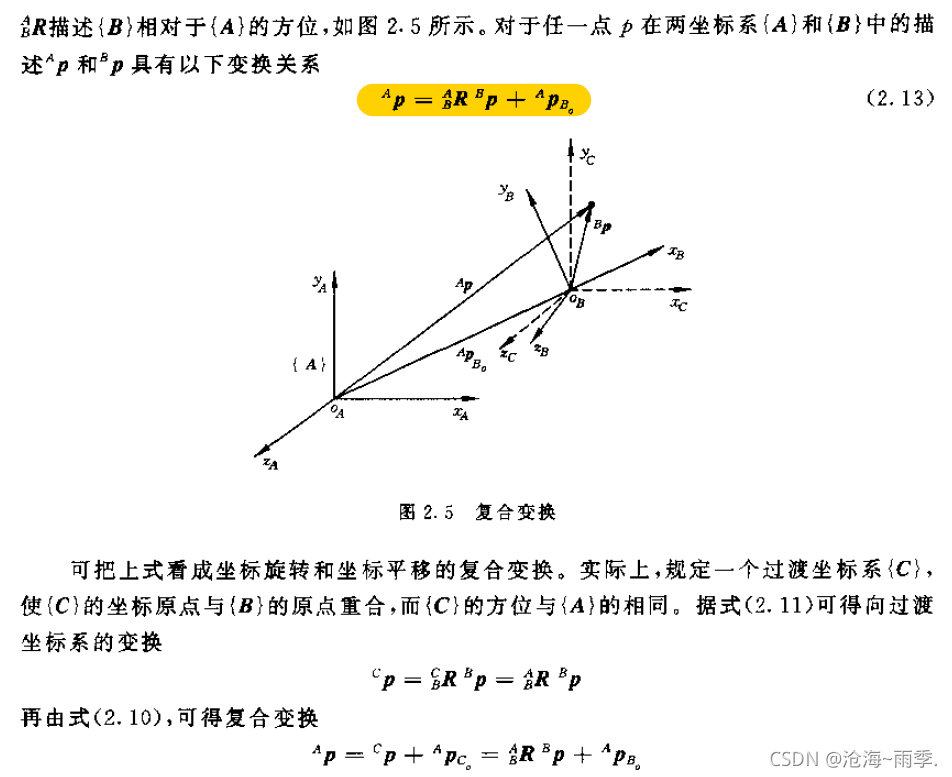
- 最一般的情形:两坐标系原点既不重合,也不相同。(复合变换)
齐次坐标变换
*首先了解什么是齐次变换?为什么要了解齐次变换?*https://blog.csdn.net/xiaolongwoaini99/article/details/79667941?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163443667916780265482206%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=163443667916780265482206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduend~default-1-79667941.first_rank_v2_pc_rank_v29&utm_term=%E4%BB%80%E4%B9%88%E5%8F%AB%E9%BD%90%E6%AC%A1%E5%8F%98%E6%8D%A2&spm=1018.2226.3001.4449
https://blog.csdn.net/xiaolongwoaini99/article/details/79667941?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163443667916780265482206%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=163443667916780265482206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduend~default-1-79667941.first_rank_v2_pc_rank_v29&utm_term=%E4%BB%80%E4%B9%88%E5%8F%AB%E9%BD%90%E6%AC%A1%E5%8F%98%E6%8D%A2&spm=1018.2226.3001.4449
1.齐次变换

1.平移齐次坐标变换

2.旋转齐次坐标变换

其实将齐次变换与之前的普通坐标变换结合起来看,就很通俗易懂了。我们再来看平移变换和旋转变换混合的一般齐次变换情况:
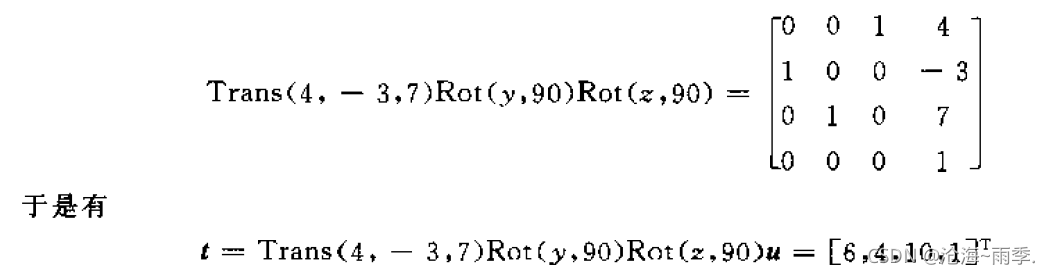
上面就是将矢量u先沿z轴旋转90度,再沿y轴旋转90度,最后进行4i-3j+7k的平移变换,齐次复合变换。最终得到矢量t,注意先后顺序,最靠近u的是先变换的,因为在矩阵计算中,AB≠BA。
物体的变换及逆变换
1.物体位置描述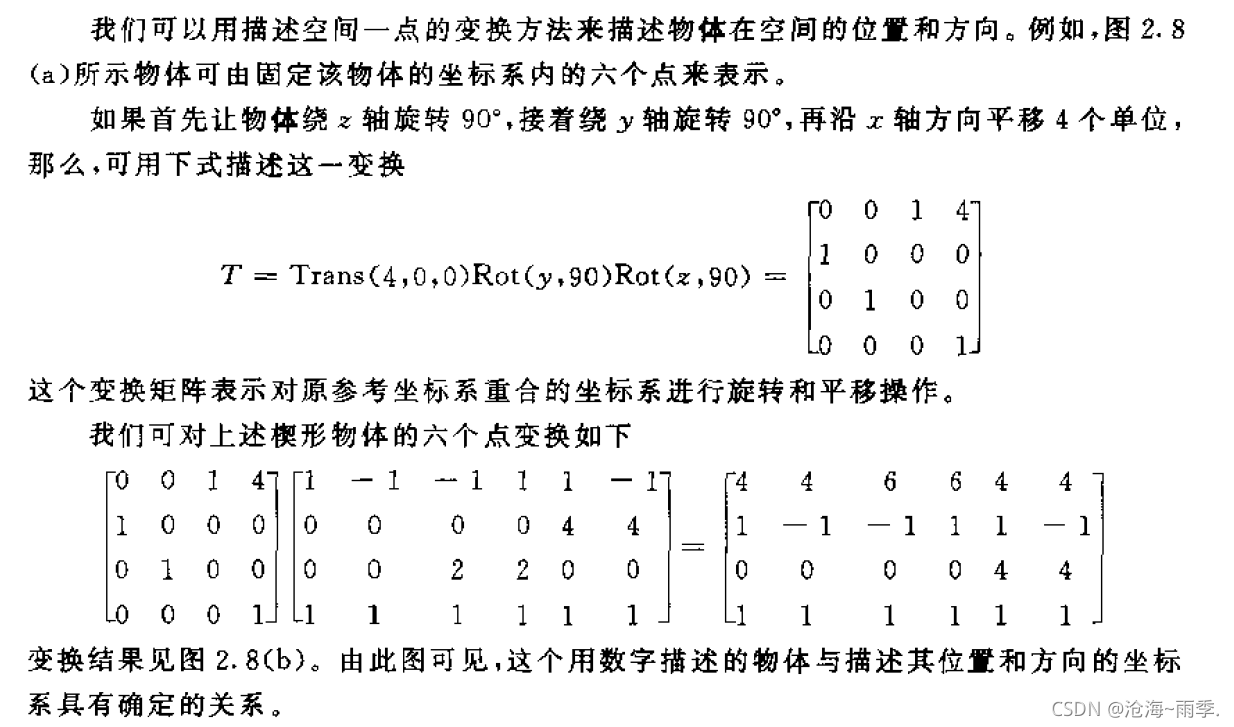
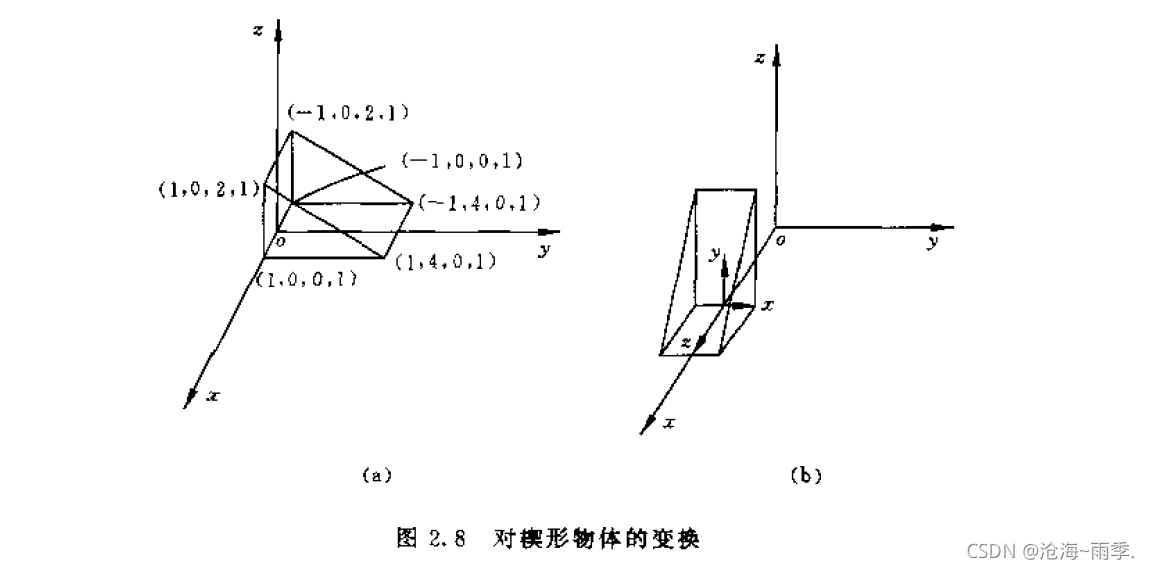
如图所示,六个点坐标组成一个6x4的矩阵,代替了之前的矢量。
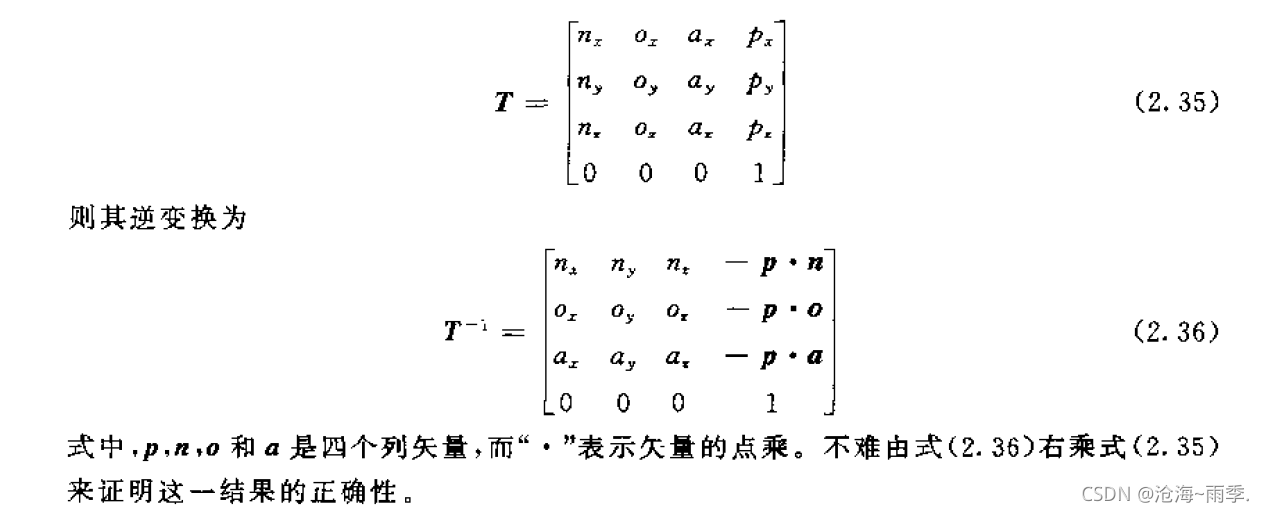
2.齐次变换的逆矩阵
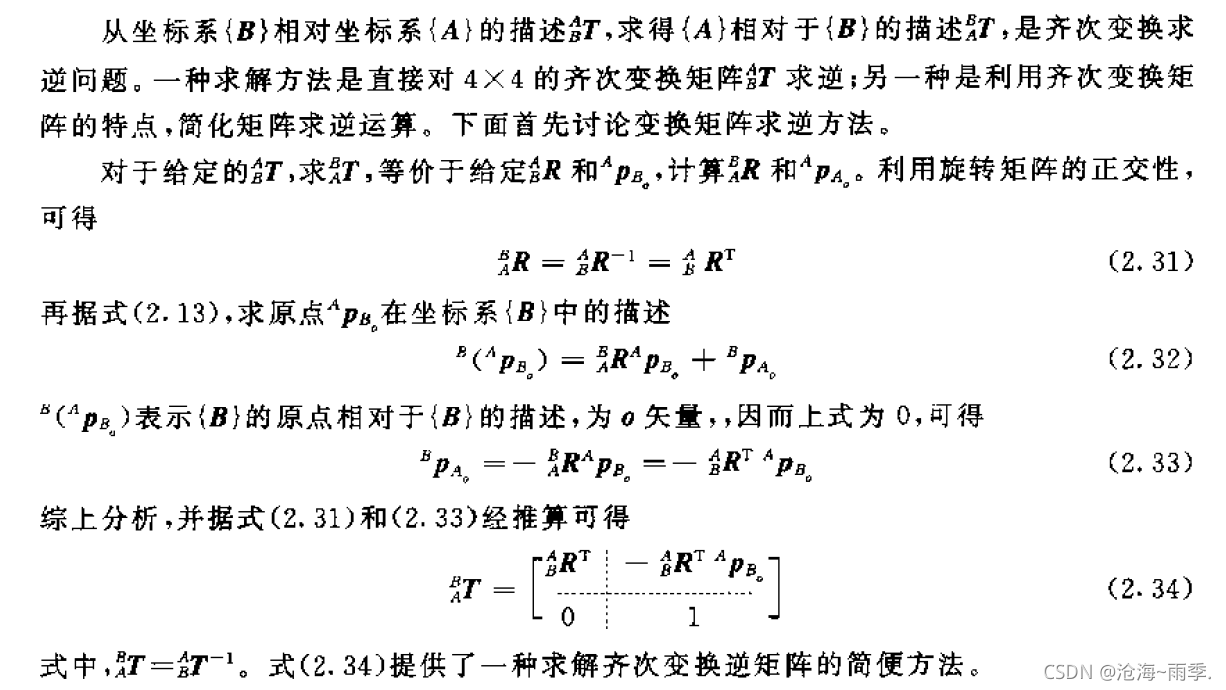
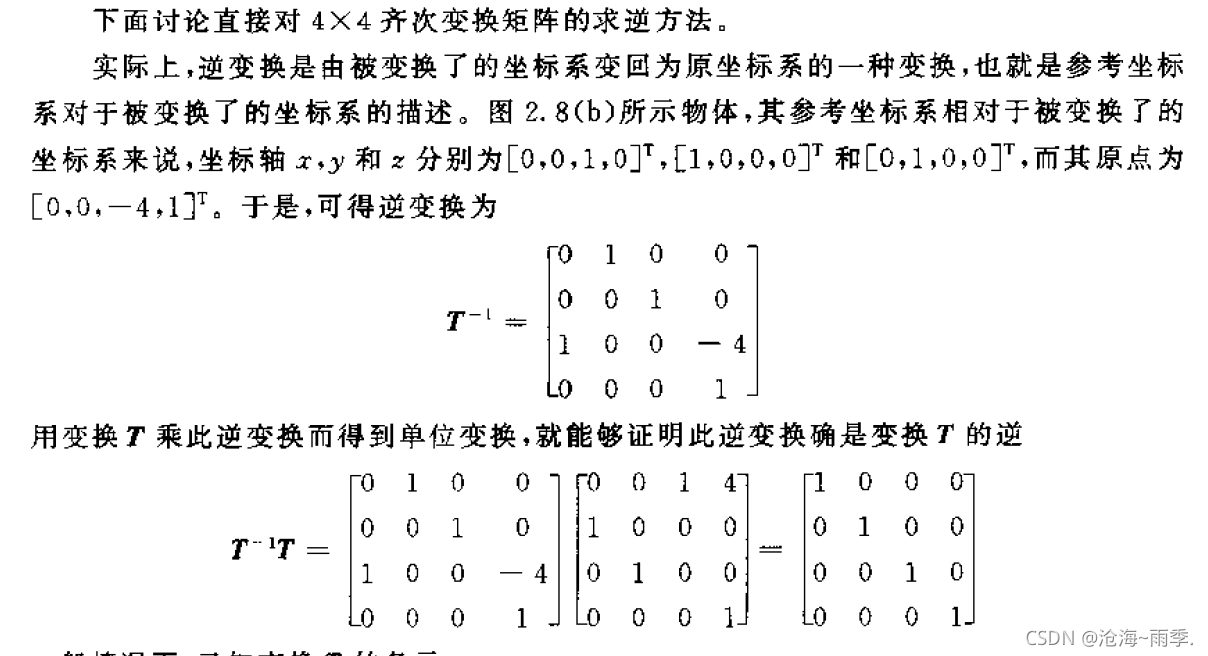
一般情况下,已知变换***T***的各个元素

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)