
自动控制原理(四)
根轨迹分析法概述根轨迹的概念根轨迹的绘制基本规则和步骤特征方程、确定根轨迹的方向、起点和终点根轨迹的分支数根轨迹的连续性和对称性实轴上根轨迹的分布根轨迹的渐近线根轨迹的分离、会合点根轨迹与虚轴的交点根轨迹的入射角和出射角闭环极点之和(非重点)闭环极点之积(非重点)广义根轨迹的绘制参变量根轨迹的绘制正反馈系统根轨迹的绘制控制系统的根轨迹分析s平面上的三种规律开环零极点对根轨迹的影响增加开环零点对根轨
根轨迹分析法
概述
自动控制系统的稳定性完全由闭环特征方程的根(闭环极点)决定。而系统瞬态响应的基本性能则取决于闭环传递函数的极点和零点的分布。
1948年,伊文思(W.R.Evans)提出了一种求解特征方程根变化规律的简单方法 -----根轨迹法 。
根轨迹的概念
(1)解析法绘制根轨迹
计算出闭环特征方程的根,当参数K从零变为无穷大时闭环特征跟在复平面上描绘出若干曲线(根轨迹)。
(2)根轨迹方程
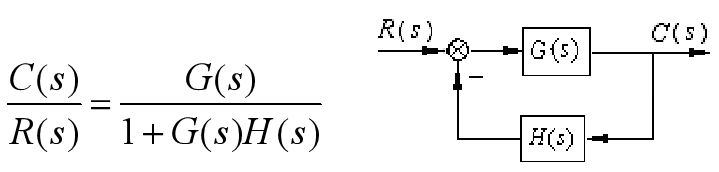
闭环特征方程:
1+G(s)H(s) = 0 或 G(s)H(s) = -1
通常系统开环传递函数G(s)H(s)等于系统各环节传递函数
之积,即

幅值方程:
K
∗
为
根
轨
迹
增
益
K^*为根轨迹增益
K∗为根轨迹增益
相角方程:

根轨迹的绘制
基本规则和步骤
特征方程、确定根轨迹的方向、起点和终点
根轨迹起始于开环极点,终止于开环零点。如果开环零点数目m小于开环极点数目n,则有n-m条根轨迹终止于无穷远处。
根轨迹的分支数
每个闭环特征根的变化轨迹都是整个根轨迹的一个分支,因此根轨迹的分支数与闭环特征方程的根的数目相同。(根轨迹的分支数等于特征方程的阶次,也即开环零点数m和开环极点数n中的较大者。)
根轨迹的连续性和对称性
根轨迹是连续的,且以实轴为对称的曲线。
实轴上根轨迹的分布
实轴上属于根轨迹的部分,其右边开环零、极点的个数之和为奇数。
根轨迹的渐近线
如果系统的有限开环零点数m少于其开环极点数n,则当根迹增益K*→∞时,趋向无穷远处根轨迹的渐近线共有n-m条。
这些渐近线与实轴上的交点坐标为:
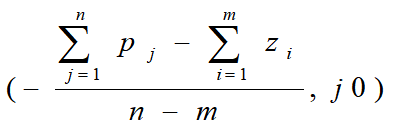
与实轴正方向的夹角为

根轨迹的分离、会合点
根轨迹分离点或会合点的坐标,可通过求解方程得到
根轨迹与虚轴的交点
方法一:用
s
=
j
ω
s=j\omega
s=jω代入特征方程求解

方法二:根据系统临界稳定的条件,利用劳斯判据法求解:
根轨迹与虚轴的交点坐标及临界根迹增益,可以通过用
s
=
j
ω
s=j\omega
s=jω代入系统闭环特征方程求取,也可用劳斯判据列表的方法确定。
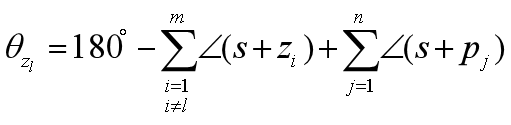
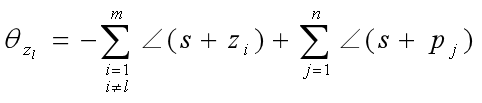
根轨迹的入射角和出射角
出射角:
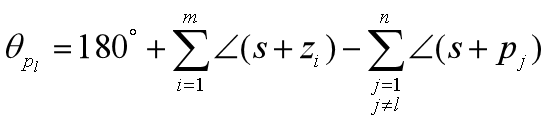
入射角:
闭环极点之和(非重点)
当满足 ( n − m ) ≥ 2 (n-m)\ge{2} (n−m)≥2时,闭环极点之和等于开环极点之和。
闭环极点之积(非重点)
若满足 ( n − m ) ≥ 2 (n-m)\ge{2} (n−m)≥2,且有开环零点位于原点时,闭环极点之积等于开环极点之积。
广义根轨迹的绘制
以非开环根迹增益为可变参数的根归机轨迹,或非负反馈系统的根轨迹统称为广义根轨迹。
参变量根轨迹的绘制
规则:与常规根轨迹绘制方法完全相同。
关键点:将控制系统的特征方程进行等效变换,求出等效开环传递函数。

正反馈系统根轨迹的绘制

在正反馈系统根轨迹的绘制规则中,凡是与幅角条件有关的规则都要作相应的修改。
- 实轴上根轨迹的确定:右边开环零、极点的个数为偶数。
- 根轨迹的渐近线:在实轴上交点坐标和夹角为

- 根轨迹的出射角和入射角

控制系统的根轨迹分析

s平面上的三种规律

开环零极点对根轨迹的影响
可改变根轨迹的形状,也可影响控制系统的性能。
增加开环零点对根轨迹的影响
使根轨迹向s左半平面弯曲或移动,使系统的稳定性提高。
增加开环极点对根轨迹的影响
渐近线的重心将沿实轴向右移动。且-p0数值愈大,向右移动的距离也愈大。
因此,渐近线将带动根轨迹向右半s平面弯曲或移动,从而可能引起系统性能恶化。
闭环零点、极点对系统瞬态性能的影响
(1)闭环极点的分布决定了瞬态响应的类型;
(2)闭环零点、极点的分布决定了瞬态响应曲线的形状及指标;
(3)远离虚轴的极点(或零点)对瞬态响应的影响;
(4)闭环主导极点。反馈系统的零点、极点都影响系统的瞬态响应,但影响大小是有差别的;
(5)偶极子对瞬态响应的影响;
(6)闭环零点对瞬态响应的影响;
(7)闭环极点对瞬态响应的影响。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)