Python实现三维世界坐标向二维像素坐标的转换(附源码)
Autonomous vehicle 杂谈_01需要做的前期准备通过 calibration 得到的相机内外参数set up 一个用于存放py源码(.py)、待转换三维坐标(.txt)__ps: 格式为(Xw,Yw,Zw)、转换二维坐标结果(.txt)的文件夹,大概就是像下边图片中的一样随便一个可以run python文件的IDE源码如下(需要更改自己的相机参数)# 实现三维坐标向二维坐标的转换i
·
Autonomous vehicle 杂谈_01
一. 坐标转换的过程
- 总过程:

- 分步实现
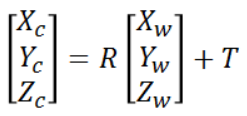
世界坐标转换为相机坐标
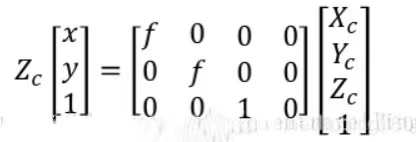
相机坐标转换为图像坐标
图像坐标转换为像素坐标

PS: 世界坐标: (Xw, Yw, Zw)、 相机坐标:(Xc, Yc, Zc)、 图像坐标:(x, y)、 像素坐标: (u, v)、 相机焦距: f、 旋转矩阵:R、 平移矩阵: T
PS: 本文代码不够准确,请移步至博主更新版博文:Python实现激光雷达点云的向图像的重投影(世界坐标转换为像素坐标 + Autoware标定结果使用方法)- - 附源码 * 更新版 - -
二. 需要做的前期准备
- 通过 calibration 得到的相机内外参数
- set up 一个用于存放py源码(.py)、待转换三维坐标(.txt)__ps: 格式为(Xw,Yw,Zw)、转换二维坐标结果(.txt)的文件夹,大概就是像下边图片中的一样
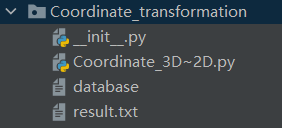
- 随便一个可以run python文件的IDE
三. 源码如下(需要更改自己的相机参数)
# 实现三维坐标向二维坐标的转换
import numpy as np
"""相机内、外参矩阵"""
# 外参矩阵 (需要改)
Out = np.mat([
[-0.117, -0.992, 0.028, -0.125],
[-0.0033, -0.0278, -0.9996, 0.2525],
[0.993, -0.1174, 0.00000315, 0.0716],
[0, 0, 0, 1]
])
# 内参矩阵 (需要改)
K = np.mat([
[610.53, 0, 368.114],
[0, 605.93, 223.969],
[0, 0, 1]
])
"""坐标转换"""
# 打开用于存放世界坐标的txt文件,将其中的以字符串格式保存的世界坐标转换成(Xw, Yw, Zw, 1)的元组格式
f = open('database', 'r')
database = []
for line in f.readlines():
coordinate = line.strip() # 去掉左右的空格符
coordinate = eval(coordinate) # 将字符串格式的坐标转换为元组格式
database.append(coordinate)
# print(database)
world_coordinate_list = []
for item in database:
world_coordinate_part = (item[0], item[1], item[2], 1)
world_coordinate_list.append(world_coordinate_part)
# print(world_coordinate_list)
pixel_coordinate_list = []
for item in world_coordinate_list:
world_coordinate = np.mat([
[item[0]],
[item[1]],
[item[2]],
[item[3]]
])
print(f'世界坐标为:\n{world_coordinate}')
# print(type(world_coordinate))
# 世界坐标系转换为相加坐标系 (Xw,Yw,Zw)--> (Xc,Yc,Zc)
camera_coordinate = Out * world_coordinate
print(f'相机坐标为:\n{camera_coordinate}')
Zc = float(camera_coordinate[2])
print(f'Zc={Zc}')
# 相机坐标系转图像坐标系 (Xc,Yc,Zc) --> (x, y) 下边的f改为焦距
focal_length = np.mat([
[f, 0, 0, 0],
[0, f, 0, 0],
[0, 0, 1, 0]
])
image_coordinate = (focal_length * camera_coordinate) / Zc
print(f'图像坐标为:\n{image_coordinate}')
# 图像坐标系转换为像素坐标系
pixel_coordinate = K * image_coordinate
print(f'像素坐标为:\n{pixel_coordinate}')
pixel_coordinate_list.append(pixel_coordinate)
print('---------------------分割线--------------------------------')
print(pixel_coordinate_list)
f = open("result.txt", "w", encoding="utf-8")
for item in pixel_coordinate_list:
f.write(str(item)+'\n')
f.write('------------分割线-----------------'+'\n')
f.close()
坐标转换方法参考:https://blog.csdn.net/guyuealian/article/details/104184551
如有问题,敬请指正。欢迎转载,但请注明出处。

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)