自动驾驶开源平台整理
1、LyftLyft的自动驾驶汽车研发部门被称为Level 5,是最高级别自动驾驶的代名词。该部门的办公室位于距Lyft1旧金山总部30英里的Palo Alto。为了快速切入到自动驾驶的研发之中,Lyft正在使用开源软件,其中包括ROS很多相关的项目都使用这样的开源软件搭建自己的基础平台;还有百度的Apollo平台,免去了Lyft重写自己软件系统的历烦。除了Level 5团队以外,Lyft还...
1、Lyft
Lyft的自动驾驶汽车研发部门被称为Level 5,是最高级别自动驾驶的代名词。该部门的办公室位于距Lyft1旧金山总部30英里的Palo Alto。
为了快速切入到自动驾驶的研发之中,Lyft正在使用开源软件,其中包括ROS很多相关的项目都使用这样的开源软件搭建自己的基础平台;还有百度的Apollo平台,免去了Lyft重写自己软件系统的历烦。
除了Level 5团队以外,Lyft还有一个开放平台允许其他的企业与其合作,将其自动驾驶汽车投放到Lyft的打车网络上。这某种意义就像是各种各样的手机都要接入到无线运营商的网络上一样。
总结:Lyft没有完全自主的自动驾驶系统,在自研自动驾驶技术上的表现似乎没有太多进展,主要是基于apllo等其他开源项目,他的自动驾驶平台侧重点不在自动驾驶而在于开车服务。
2、Open Autonomous Safety
Voyage是一家从优达学城(Udacity)分立出来的公司,它将安全视为一切技术决策的基准,并致力于通过开源的方式,集结多数人的智慧来激励无人车安全技术的快速进步。这还带来了另外一个好处:技术细节透明会显著提升公众对无人车技术的信任程度。
OAS(Open Autonomous Safety)是Voyage为自己的L4自动驾驶出租车开发的开源项目,包含了五个主要部分:
- 场景测试(Scenario Testing)在NHTSA和Waymo的基础上,Voyage又增加了额外的测试场景来强化无人车的“行为能力"。每个安全场景都定义了必须要遵守的行为准则,以确保无人车能够自主地地应对周边环境并符合最高标准的行车安全。
- 功能安全(Functional Safety)基于ISO26262对安全方法进行建模,实现正确地执行预期的功能(可靠性),并以可预测的方式“失效"(安全性)
- 故障注入(Fault Injection)通过“蛮力测试"暴露小概率发生的失效行为是极为耗时的,因此需要人为注入特定的故障,编写精巧的测试程序来触发无人车的软件或硬件失效,观察汽车的反应并评估各种失效引发的后果。关于这部分的技术细节Voyage尚未发布,我们不妨拭目以待。
- 自主评估(Autonomy Assessment)对于无人车这个几乎每天都在迭代更新的产品来说,很难说某个技术升级是让无人车"进步"了还是"退步"了,因此需要建立一套始终如一,良好运作的评价标准来指引正确的技术方向。
- 测试工具集(Testing Toolkit)确保所有人正确地理解一个复杂的测试场景是一个棘手的问题,因此需要一套标准图形工具来确保传递准确无误的信息,这是保证快速迭代验证,优化测试覆盖率和实现高重现性的坚实基础。
总结:该开源平台主要着眼于自动驾驶安全测试,在自动驾驶安全领域百度Apollo也有涉及
3、Comma.ai
Comma.ai转型以销售自动驾驶软件为主,这套自动驾驶软件名为Open Polot,软件所有的代码都是免费开源的。并推出名为Comma Neo的基础必要硬件设备。
openpilot是一个开源的驾驶员辅助系统。目前,openpilot执行自适应巡航控制(ACC),自动车道居中(ALC),前向碰撞警告(FCW)和车道偏离警告(LDW)的功能,以支持越来越多的受支持的汽车制造商,车型和车型年份。此外,在使用openpilot时,基于摄像头的驾驶员监控(DM)功能会提醒分心的驾驶员和正在睡觉的驾驶员。
项目链接:https://github.com/commaai/openpilot#what-is-openpilot
总结:个人认为Open Polot实质是利用低成本,较少的Comma Neo硬件套装对市场上特定的非智能汽车进行改造,再利用openpilot自动驾驶系统使其具备L2级别的自动解释功能。且与特斯拉的自动驾驶方案相似都是单纯基于摄像头的自动驾驶方案。
4、Autoware
官网显示,目前Autoware已有3个正在进行项目,分别是Autoware.Al Autoware.Auto和Autoware.IO。
其中Autoware.Al旨在为学者、开发者和学生提供一个开源的自动驾驶研发平台,是由Tier IV和东京大学的Shinpei Kato在2015年创立的Autoware项目发展而来;Autoware.Auto用于可认证的自动驾驶软件堆栈;而Autoware.IO则专注于车辆控制接口以及连接外部软件和硬件工具。
(1)Autoware.Al
Autoware是世界上第一个用于自动驾驶汽车的“多合一”开源软件。Autoware的功能主要适合于城市,但也可以涵盖高速公路,高速公路,中山地区和地理围栏区域。为了安全使用,我们为那些不拥有真正的自动驾驶汽车的人提供了基于ROSBAG的仿真环境。如果您打算将Autoware与真正的自动驾驶汽车一起使用,请在进行现场测试之前制定安全措施和风险评估。
Autoware.Al项目地址:
https://gitlab.com/autowarefoundation/autoware.ai/autoware

Autoware提供了一组丰富的自动驾驶模块,这些模块由传感,计算和驱动功能组成。关键字包括本地化,地图绘制,对象检测与跟踪,交通信号识别,任务与运动计划,轨迹生成,车道检测与选择,车辆控制,传感器融合,摄像头,LiDAR,RADAR,深度学习,基于规则的系统,连接导航,日志记录,虚拟现实等。
Autoware用于城市自主驾驶的集成开源软件,支持以下功能:
3D本地化
3D映射路径规划*tR随
加速/制动/转向控制
数据记录
汽车/行人/物体检测
交通信号检测
交通灯识别
车道检测对象跟踪
传感器校准传感器融合
面向云的地图
连接自动化
智能手机导航
智能手机导航
软件仿真
虚拟现实
(2)AutowareAuto
AutowareAuto项目地址:
https://gitlab.com/autowarefoundation/autoware.auto/AutowareAuto
Autoware.Auto作为Autoware基金会的项目之一,是一个干净的石板重写Autoware.Al,与Autoware.Al相比,Autoware.Auto具有最佳的软件工程实践,包括PR审查,PR构建,100%文档,100%代码覆盖率,样式指南,开发和发布过程,它还有两点不同:a)我们为不同的模块(消息和API)定义了清晰的接口,并且b)为确定性而设计的体系结构,以便可以在实时和开发机器上重现行为。
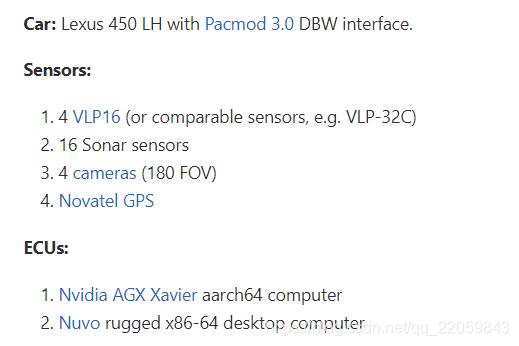
硬件:
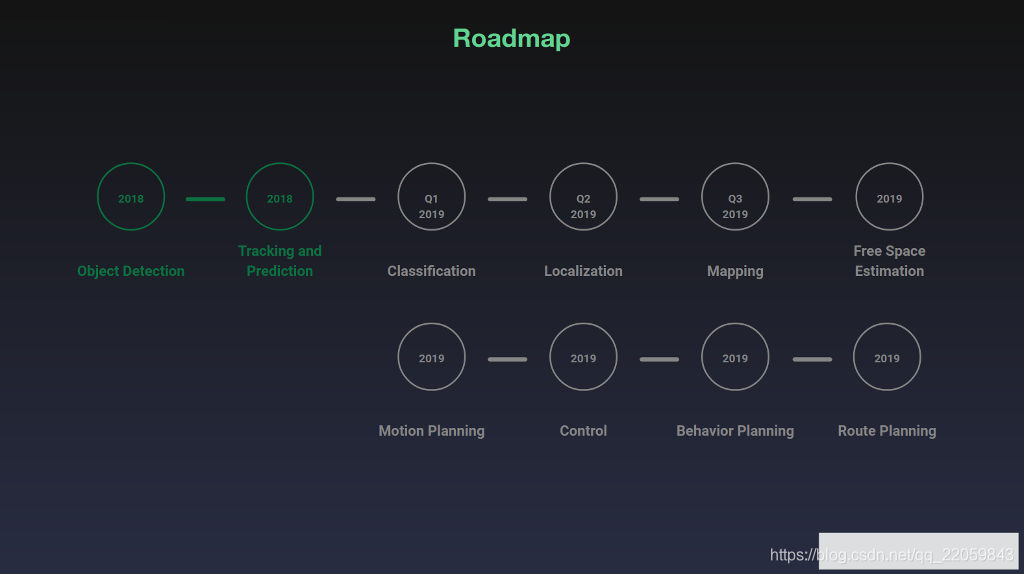
技术路线:

为开发者提供自动驾驶技术分享交流、实践成长、工具资源等,帮助开发者快速掌握自动驾驶技术。
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)