




- @yangpan011
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
简介 光学系统性能的衡量方法有很多,常见的有点扩散函数法、瑞利判断法、点列图法、光学传递函数(MTF)法等,其中MTF法在光学系统和镜头加工制造中使用最为广泛。MTF曲线真实的反映了成像系统将物方信息传递到像方的能力。MTF曲线的横坐标一般是cycle/mm或者linepair/mm[1][11],纵坐标是反映对比度传递特性的像/物方调制度的比值。 MTF的计算
使用git时出现如下错误提示:fatal: unable to access '/': schannel: next InitializeSecurityContext failed: Unknown error (0x80092013)不论是是pull,还是push都这样。在git bash终端中输入如下信息解决了该问题。Copy cert path from config...
简介 光学系统性能的衡量方法有很多,常见的有点扩散函数法、瑞利判断法、点列图法、光学传递函数(MTF)法等,其中MTF法在光学系统和镜头加工制造中使用最为广泛。MTF曲线真实的反映了成像系统将物方信息传递到像方的能力。MTF曲线的横坐标一般是cycle/mm或者linepair/mm[1][11],纵坐标是反映对比度传递特性的像/物方调制度的比值。 MTF的计算
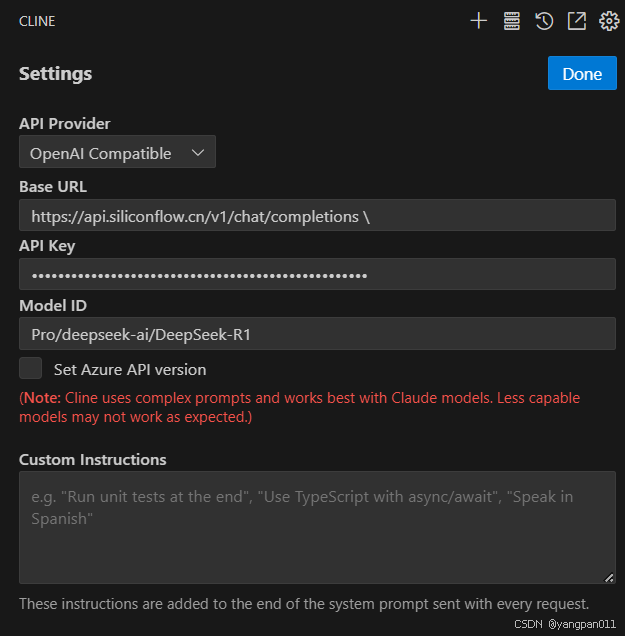
导致基于vscode + cline + deepseek无法正常工作。后面发现siliconflow上也有部署deepseek,效果好不错。多说一点,如果没有cline,在vscode拓展中直接下载即可,安装完成后有如上图绿色箭头所指图标,标识安装完成。目前注册获赠2000万Tokens(14元平台配额),邀请人和被邀请人都会送。其中有很多模型,可以自己选,也可按照如下图配置,API Key填自
作者:deng will链接:https://www.zhihu.com/question/28623194/answer/135658852来源:知乎著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。这个问题我也思考了许久,如何从高中的知识过度到大学的线代知识,偶然间看到一篇文章再结合MIT的线代和国内的西工大的矩阵论的一小撮知识,终于把这个问题可以详细的写出来了,达到知其所以
在使用python处理数据,程序运行出现'list' object has no attribute 'astype'.的问题,代码如下:x_data, y_data = pickle.load(open("train.dat", "rb"))x_data = x_data.astype('float32') / 255.0y_data = y_data.a
图像拼接算法原理 1:http://planckscale.info/?p=7http://planckscale.info/?p=84http://blog.csdn.net/xiaolizi399/article/details/41931809文章来源(planckscale.info)360°全景拼接技术简介 核心就是一个单应性条件需要满足。0. 引言...
Pytorch模型转ONNX
作者:JI Weiwei链接:https://www.zhihu.com/question/21868680/answer/25599956来源:知乎著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。作者:Faaany链接:https://www.zhihu.com/question/21868680/answer/136376374来源:知乎著作权归作者所有。商业转载请联系作者
简介 光学系统性能的衡量方法有很多,常见的有点扩散函数法、瑞利判断法、点列图法、光学传递函数(MTF)法等,其中MTF法在光学系统和镜头加工制造中使用最为广泛。MTF曲线真实的反映了成像系统将物方信息传递到像方的能力。MTF曲线的横坐标一般是cycle/mm或者linepair/mm[1][11],纵坐标是反映对比度传递特性的像/物方调制度的比值。 MTF的计算