
写文章




- @weixin_56773716
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
力控仿真平台分析比较
对机械臂力控进行仿真的四个常见仿真平台——Webots、Gazebo、CoppeliaSim 和 MuJoCo各有优缺点。从等方面进行分析,帮助你选择适合的仿真平台。

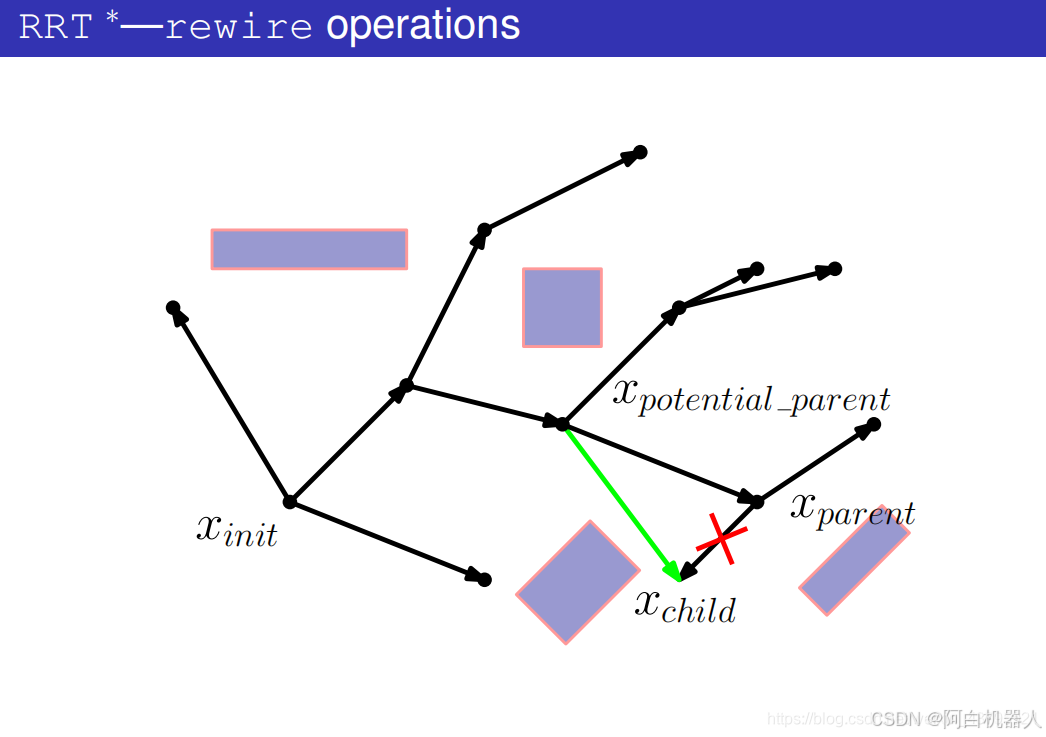
路径规划——RRT、RRT*、RRT-Connect算法说明
RRT是一种快速的路径规划方法,通过随机采样不断扩展树,适用于复杂环境中的初步路径搜索。RRT* 是 RRT 的优化版本,强调寻找最优路径,在每次扩展时对路径进行修正和优化。通过双树结构加速路径找到过程,是效率更高的版本,尤其适用于目标点比较远的情况。
Moveit2与gazebo联合仿真:添加摄像头传感器
虽然可以在中定义传感器接口,但在实际应用中,特别是与 Gazebo 结合时,通常会将传感器配置和控制器配置分开,使用专用的传感器插件会更常见。这使得代码更加简洁,功能更为清晰,并且可以更好地利用 Gazebo 提供的特性。

到底了