
写文章




- @weixin_51627982
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
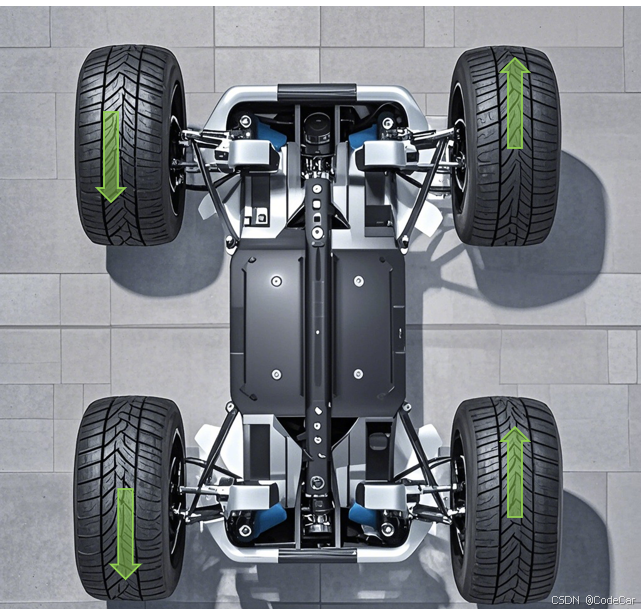
车辆横纵向动力学控制——四电机原地掉头
以上只是原地掉头的最简单的一种模式,像是最近小米演示的“圆规掉头”,其难度相对较大,这不光需要控制电机扭矩,还要控制IPB的制动力。各位如果感兴趣可以自己试一试,如果你有好的想法,欢迎评论区交流!学术界严谨求实,通过咔咔一顿推导,基于车辆动力学模型,利用MPC等高级算法,将整车横摆角速度作为控制目标,得到整车的横摆力矩,并均分给四个电机,从而实现原地掉头。由于四电机可以独立驱动,只需要控制一侧轮子
到底了