
写文章




- @weixin_41944449
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
解决嵌入式使用SQL出现 Error(5): database is locked
之前有遇到通过sqlite3_exec()函数操作数据库出现 database is locked 这样的一个问题,特别的记录一下这个问题。SQLite,是一款轻型的数据库,它的设计目标是嵌入式的,而且目前已经在很多嵌入式产品中使用了它,它占用资源非常的低,在嵌入式设备中,可能只需要几百K的内存就够了。但是,SQL只是支持单线程操作的,如果在应用程序中,有多个线程同时操作数据库,也将会产生da..
关于cmos工频干扰导致的闪烁问题
为什么会出现闪烁或者图像明暗相间的横条纹?以国内50Hz交流电为例,灯具将是以100Hz的频率波动,在同一个周期内各个点的亮度不一致。而cmos sensor在曝光的时候是全局曝光或者是局部曝光。当全局曝光时,哪怕曝光时间相同,也会导致帧与帧的图像亮度不一致,这是由于外界亮度在周期变化导致的,所以眼睛直观的看到图像闪烁;而局部曝光时,同一图像的不同行是分开曝光的,所以会看到明暗相间的横条纹。c..
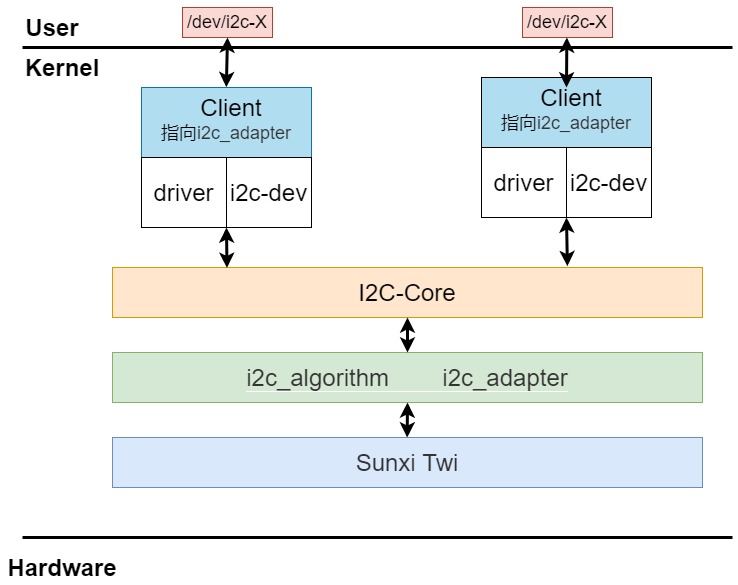
Linux设备驱动之IIC驱动
Linux I2C框架介绍
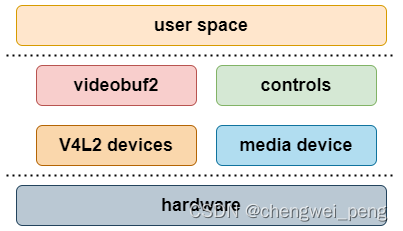
Linux设备驱动之Camera驱动
Linux Camera驱动框架
csi mipi信号解析
1. 传输模式LP(Low-Power) 模式:用于传输控制信号,最高速率 10 MHzHS(High-Speed)模式:用于高速传输数据,速率范围 [80 Mbps, 1Gbps] per Lane传输的最小单元为 1 个字节,采用小端的方式及 LSB first,MSB last。2. Lane StatesLP mode 有 4 种状态: LP00、LP01(0)、LP10(1...
到底了