
写文章




- @qq_71734878
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ROS期末复习1:无人系统/机器人体系架构及操作系统
基础知识复习

ROS学习笔记17:MoveIt!机械臂控制
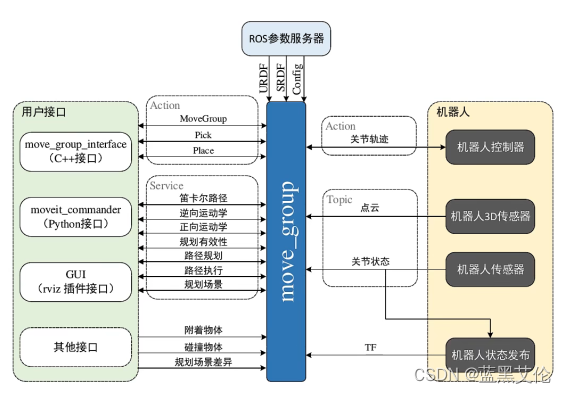
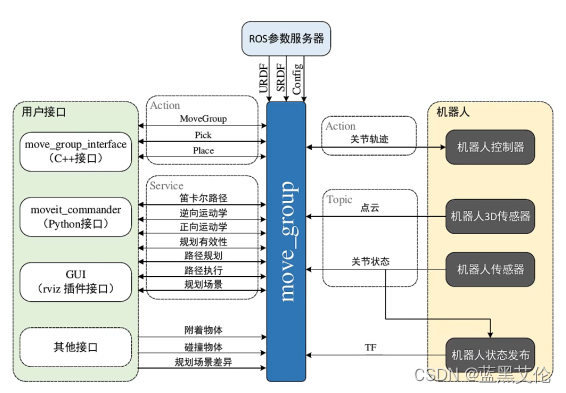
为开发者提供了一个易于使用的集成化开发平台,由一系列移动操作的功能包组成,包含运动规划、操作控制、3D感知、运动学、控制与导航算法等,且提供友好的 GUI ,可以广泛应用于工业、商业、研发和其他领域。已知机器人的初始姿态和目标姿态,以及机器人和环境的模型参数,那么可以通过某种算法,在躲避障碍物和防止自身碰撞的同时,找到一条到达目标姿态的较优路径,这种算法称为机器人的运动规划。1)组装:在控制机器人
ROS学习笔记17:MoveIt!机械臂控制
为开发者提供了一个易于使用的集成化开发平台,由一系列移动操作的功能包组成,包含运动规划、操作控制、3D感知、运动学、控制与导航算法等,且提供友好的 GUI ,可以广泛应用于工业、商业、研发和其他领域。已知机器人的初始姿态和目标姿态,以及机器人和环境的模型参数,那么可以通过某种算法,在躲避障碍物和防止自身碰撞的同时,找到一条到达目标姿态的较优路径,这种算法称为机器人的运动规划。1)组装:在控制机器人
到底了