
写文章




- @qq_57870216
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
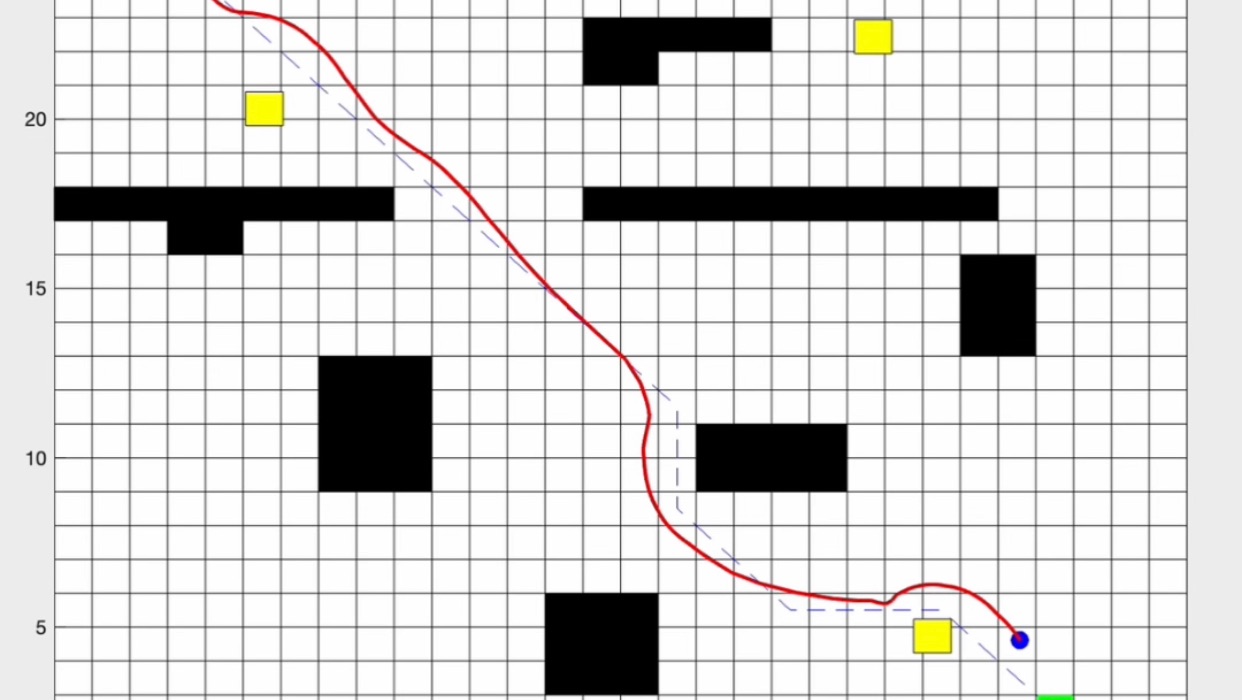
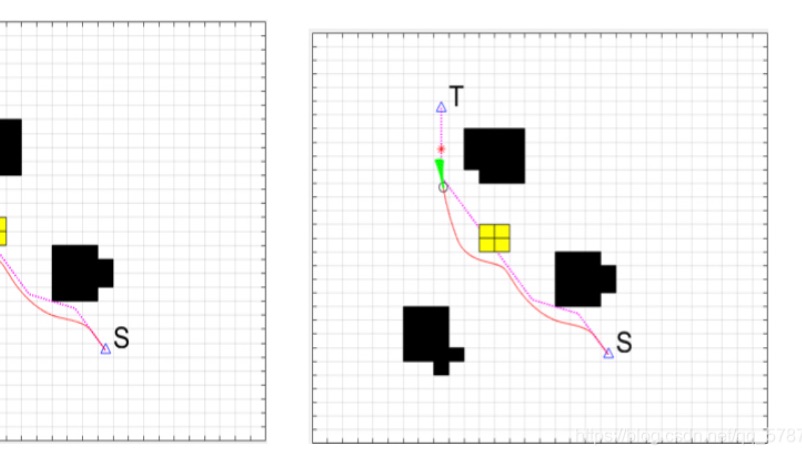
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法。
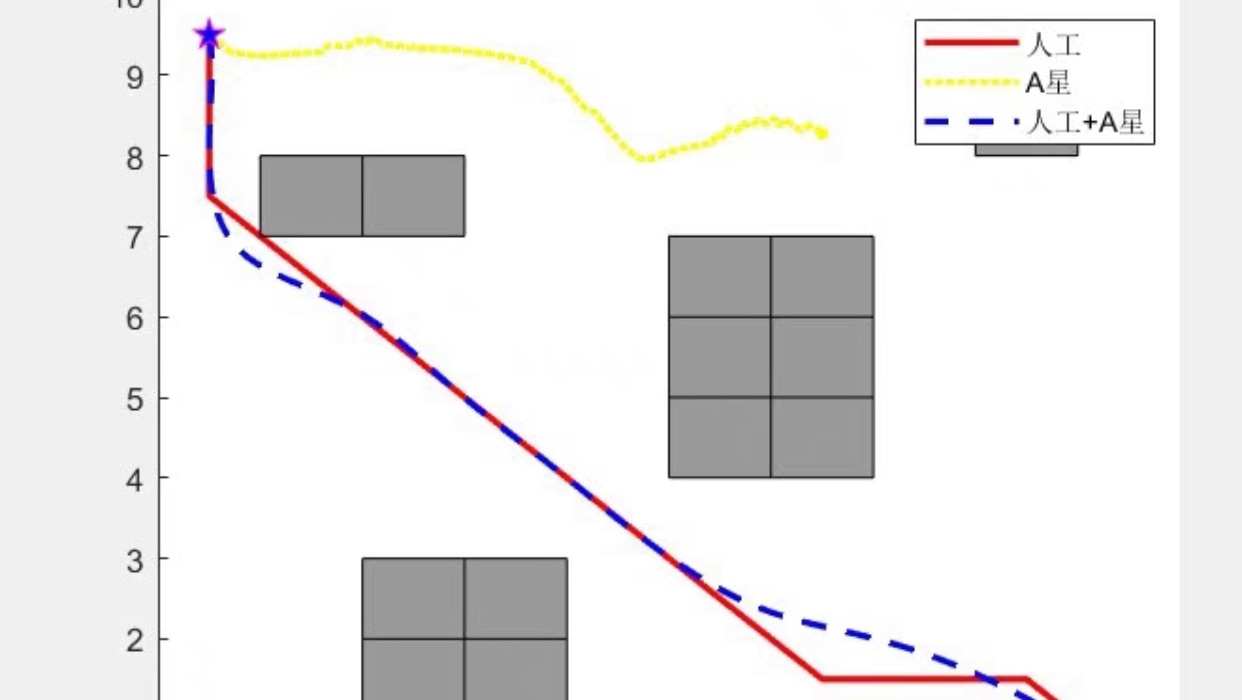
A* 算法 APF 虚拟点,人工势场融合 Astar 融合算法 路径规划 A星 人工势场 改进的a星加势场 astar 优化改进
A* 算法 APF 虚拟点,人工势场融合 Astar 融合算法 路径规划 A星 人工势场 改进的a星加势场 astar 优化改进。
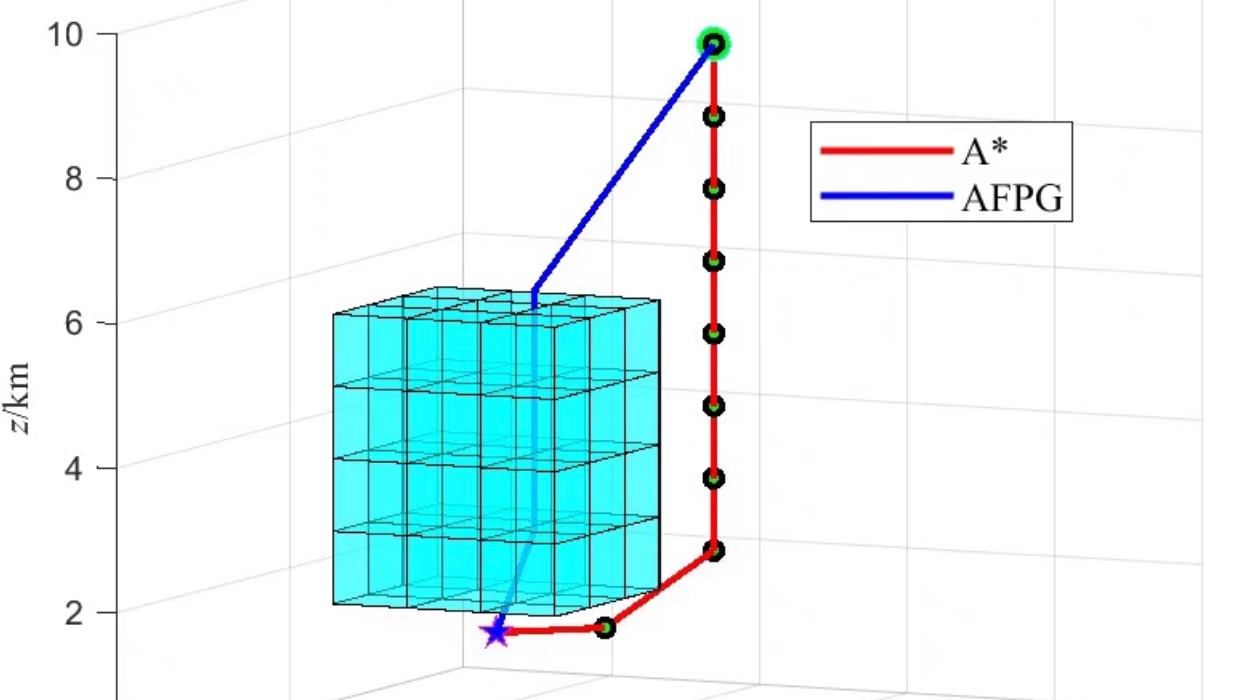
改进人工势场法 APF A*算法,三维路径规划 对比算法 A星算法 Astar astar 路径规划 斥力点附着在珊格表面 添加了虚拟目标点解决局部极小
改进人工势场法 APF A*算法,三维路径规划对比算法 A星算法 Astar astar 路径规划 斥力点附着在珊格表面 添加了虚拟目标点解决局部极小。
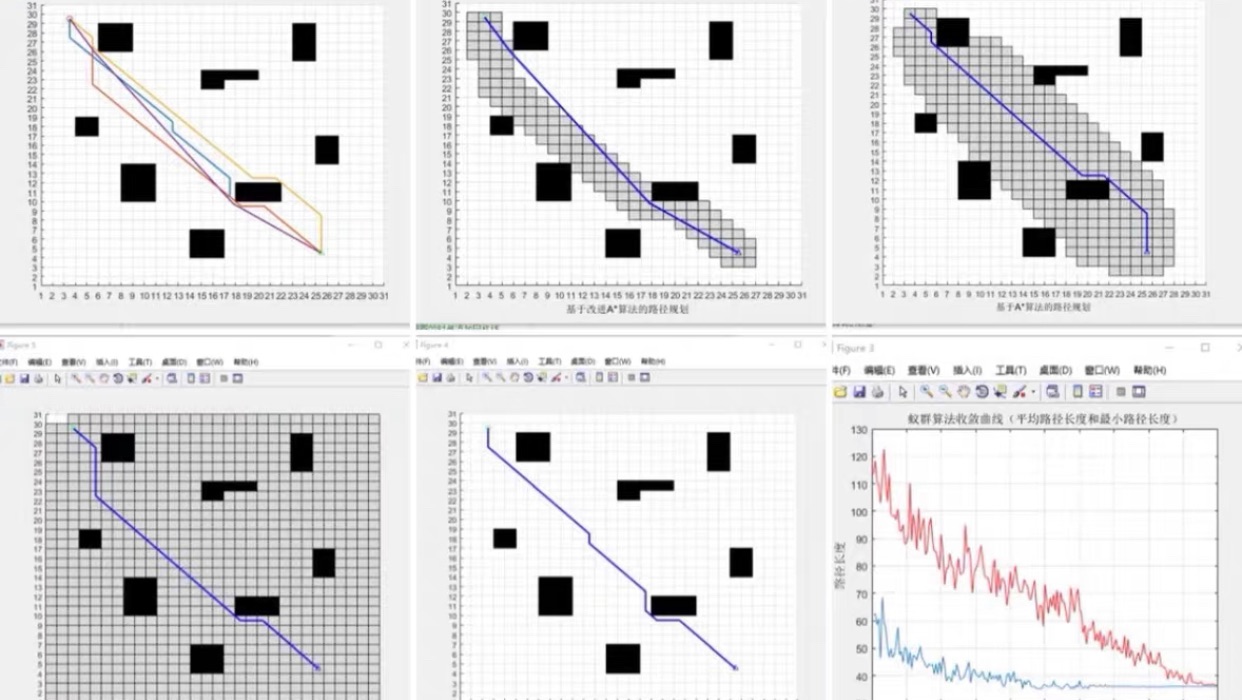
改进A*算法 Astar A* astar A星算法对比 数据详细 路径规划算法 Matlab
改进A*算法 Astar A* astar A星算法对比 数据详细 路径规划算法 Matlab。
改进A*和改进动态窗口路径规划算法
扩展邻域Astar算法 动态窗口法 DWA
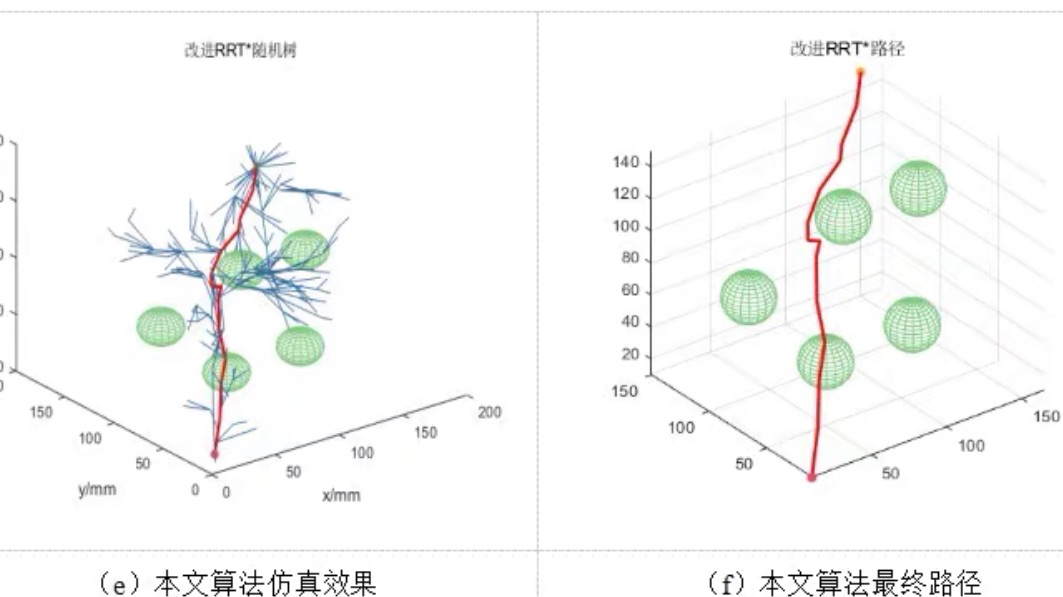
三维RRT路径规划算法。有RRT、RRT*和引入目标偏置的RRT*-connect三种算法。输出时间,路径长度和路径节点数,三种路径规划算法基于matlab
三维RRT路径规划算法。有RRT、RRT*和引入目标偏置的RRT*-connect三种算法。输出时间,路径长度和路径节点数,三种路径规划算法基于matlab。
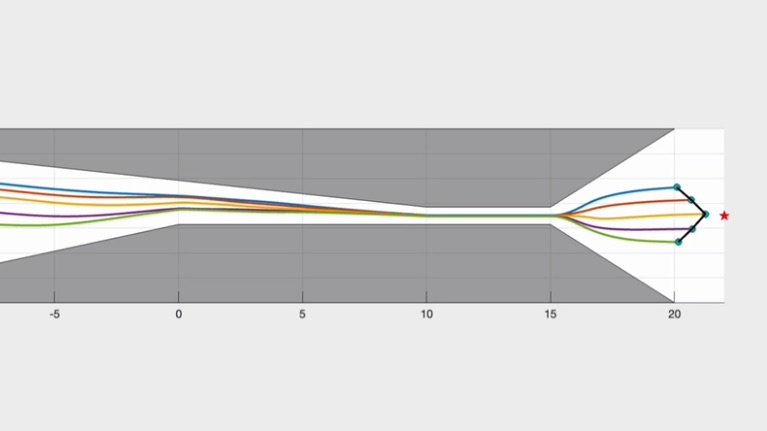
编队路径规划 基于分布式控制策略 编队+避障+避碰+自重构 多机器人 自重构 UAV 编队 可以和RRT融合 融合算法 改进路径规划 动态路径规划
编队路径规划 基于分布式控制策略编队+避障+避碰+自重构 多机器人 自重构 UAV 编队 可以和RRT融合融合算法 改进路径规划 动态路径规划。
无人机集群编队 经典集群flocking算法 动态规划 编队 集群 路径规划
无人机集群编队 经典集群flocking算法 动态规划 编队 集群 路径规划。
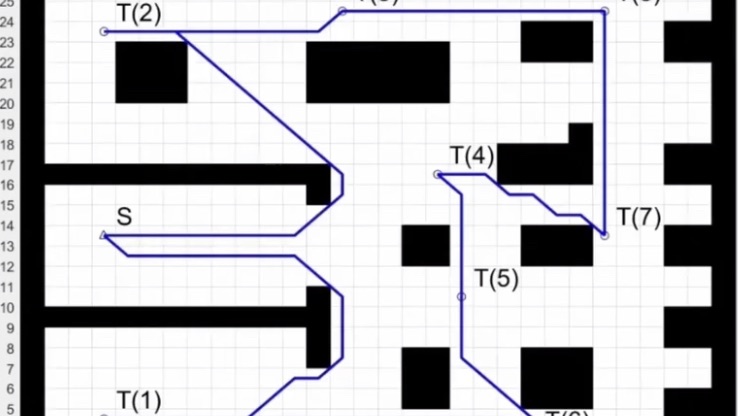
多目标路径规划 灰狼算法 GWO 排序 A*算法避障 Astar A星算法 gwo 排序智能优化算法 astar
多目标路径规划 灰狼算法 GWO 排序 A*算法避障 Astar A星算法 gwo 排序智能优化算法 astar。
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法。