
写文章




- @qq_49342665
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
NavFn全局路径规划算法详解
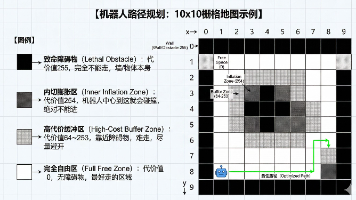
摘要:NavFn是ROS中的经典全局路径规划算法,通过栅格地图和代价地图,使用Dijkstra/A*算法寻找最优路径。其核心原理类似"水波纹扩散":从终点开始传播势能值,起点沿梯度下降方向回溯形成路径。输入包括代价地图、起点终点坐标和地图参数,输出为全局路径点序列。实现过程分为四步:初始化势能数组、Dijkstra波前扩散、计算梯度场、沿梯度回溯生成路径。该算法适用于规划全局最
DWA/DWB局部路径规划
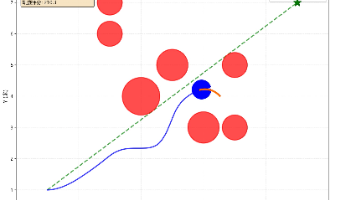
摘要:本文系统介绍了移动机器人导航中的局部路径规划算法DWA(动态窗口法)及其升级版DWB。DWA通过"采样-预测-评分-选优"的循环机制,在满足动力学约束的前提下实时输出最优速度指令,实现路径跟踪与动态避障。DWB在保持DWA核心思想的基础上,采用全插件化架构,将轨迹生成、评分规则等功能模块化,显著提升了算法的扩展性和适应性。文章详细解析了DWA的四步工作流程、评价函数构成及
到底了