
写文章




- @qq_43653371
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
汇川机器人+五点法标定常规托盘码垛
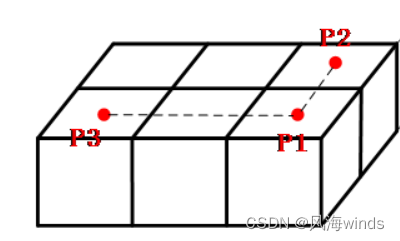
使用五点法标定常规平行四边形托盘,五个标定点可以解算出正向码垛的四角坐标、正反取料换向偏移和边沿干涉避让偏移,所有可以兼容三种摆盘方向的码垛以及无工具坐标下的托盘边沿避让,文并附汇川机器人实现代码。
Epson机器人发送Fins TCP 命令读写欧姆龙PLC数据
评估后决定使用标准I/O的方式完成PLC对Epson机器人的控制和一些重要交互,例如机器人程序启停、机器人系统状态、取放料允许信号和取放料完成信号,而其他时效性低的数据例如产品换型等,则通过机器人侧发送FinsTCP报文读写PLC地址,从而实现数据交换。3、由于项目上精简机器人与PLC的交互数量后,机器人的标准IO足够用(最多支持24bit的输入、16bit的输出),所以后期程序全部改走标准IO交
汇川机器人+五点法标定常规托盘码垛
使用五点法标定常规平行四边形托盘,五个标定点可以解算出正向码垛的四角坐标、正反取料换向偏移和边沿干涉避让偏移,所有可以兼容三种摆盘方向的码垛以及无工具坐标下的托盘边沿避让,文并附汇川机器人实现代码。
到底了