
写文章




- @qq_43108723
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ICCV 2025 SEGS-SLAM:一种结构启发的3DGS+SLAM算法,TUM RGB-D、Replica、EuRoC、Scannet均超过SOTA!
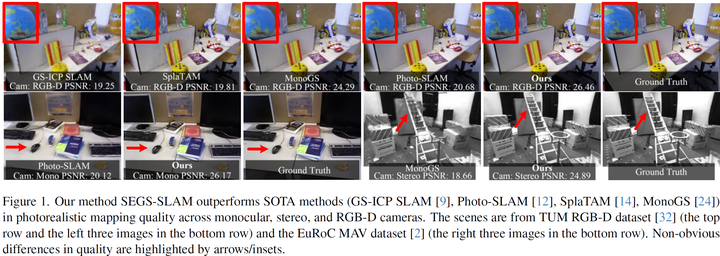
为解决这些问题,我们提出了SEGS-SLAM,一种结构增强的3D高斯溅射SLAM系统,实现了高质量的照片级真实感建图。,限制他们的渲染质量。我们的insight是:外观变化是由于观测位姿与光源的位置变化导致的,因此将外观变化编码到位姿空间,就能很好地预测新视角的外观变化了。我们的方法将ORB-SLAM3与Scaffol-GS结合,在训练完成后获得了很好地结构性,因此对于细小的结构能有更好地还原,见
到底了