
写文章




- @qq_41776321
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
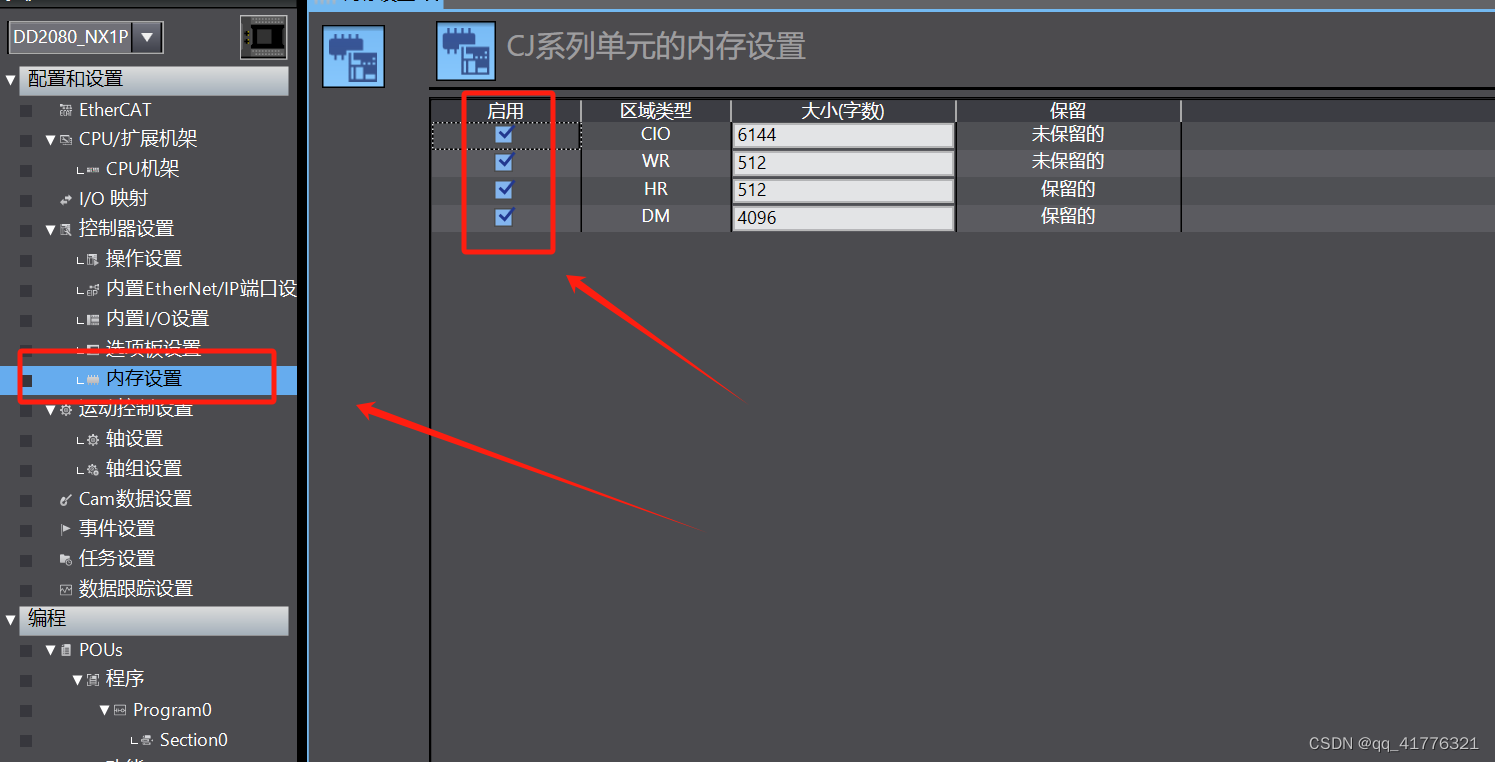
欧姆龙FINS通讯python读取CIO、DR、WR、HR
二、设置IP地址和FINS参数。三、编写PLC程序进行通讯测试。和欧姆龙的NX系列PLC通讯。一、启用需要通讯的内存单元。
协作臂机器人运动学逆解算法python
协作臂机器人的运动学逆解算法。
欧姆龙FINS通讯python读取CIO、DR、WR、HR
二、设置IP地址和FINS参数。三、编写PLC程序进行通讯测试。和欧姆龙的NX系列PLC通讯。一、启用需要通讯的内存单元。
六轴协作臂机器人通过角度计算坐标,通过坐标推算电机角度python
更改机器人的臂长信息,六轴电机的旋转角度,运行程序,可以得到机器人末端的空间坐标XYZ和欧拉角RX,RY,RZ。

到底了