
写文章




- @qq_23041471
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
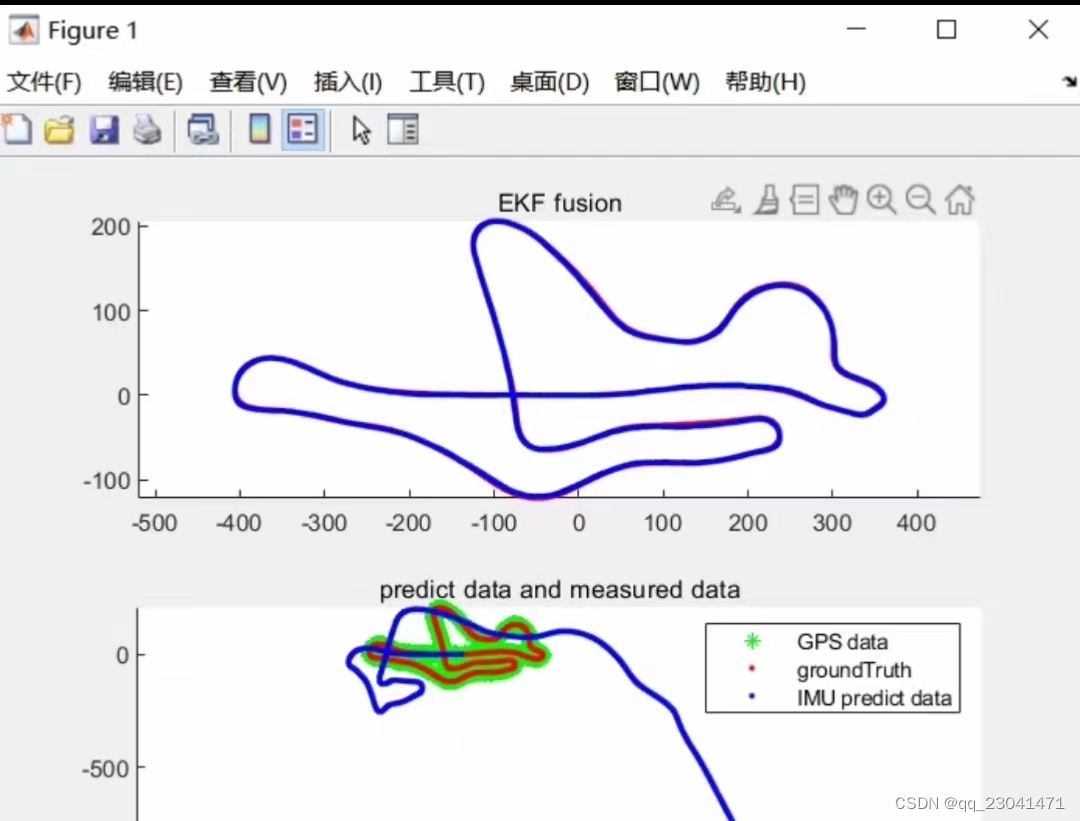
IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程,松耦合 文档原创且详细
开发语言:python 仿真平台:PIXHAWK 运行环境:ros (建议Ubuntu18.04+ros melodic) 1、四旋翼无人机跟踪小车或其他 2、跟踪算法用siamcar 3、轨迹评估 确认无人机可以跟踪小车后,可做三个场景: 1.、小车直线运动无人机跟踪,在rviz上显示小车和无人机的运动轨迹(同时保存小车和无人机运动过程中的坐标位置) 2、小车转圈 3、两辆小车(一模一样的),一
到底了