
写文章




- @prospecial
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
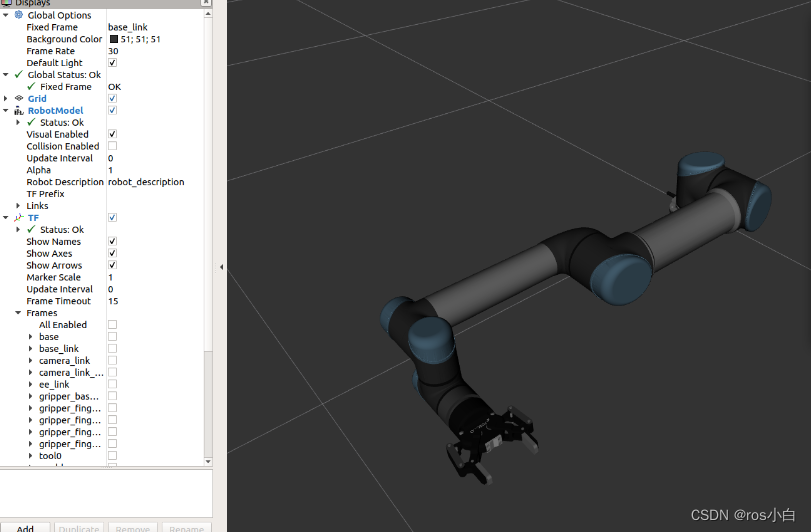
UR5+robotiq_85_gripper GAZEBO模拟|20.04 Noetic|
在大一的时候尝试跟着古月老师的ROS21讲学习过Moveit,但是一直不理解所谓的使与机械臂控制器插件的命名空间相同是什么意思。现在大二暑假了,花了一个星期的事件整理了这部分的资料,并且修改了古月老师的marm机械臂适用于noetic,并依葫芦画瓢给ur机器人增加了robotiq_85_gripper,希望给跟我一样的ROS小白有一定的启发意义。
到底了