
写文章




- @ohayiye
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
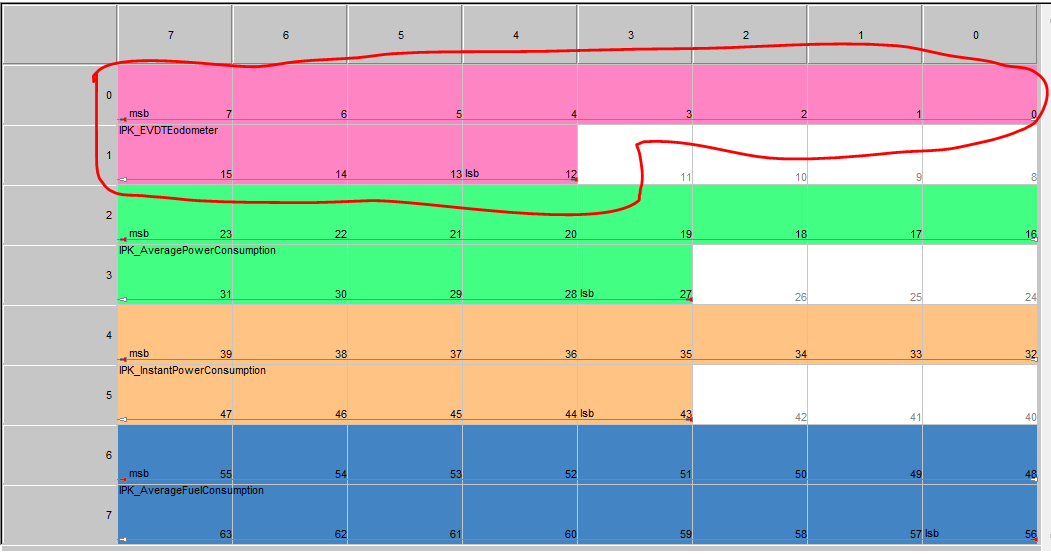
通信大小端_Motorola和Intel
通信大小端_小白学习笔记原因什么是大端小端CAN解析Motorola格式:Intel格式原因最近刚进入自动驾驶领域,调试线控底盘时遇到CAN的解析问题,在此记录自己学到的知识点。什么是大端小端1.大端模式(big endian),小端模式(little endian),endianness翻译过来是字节顺序,因此大小端均指字节顺序,非位顺序。2.在计算机内存/硬盘中,数据是以字节为单位的,二进制在
自动驾驶碰撞检查
简单来说主要从三个维度考虑,空间尺度,时间尺度和维度。举个栗子,和人开车一样,远处看下地图的拥堵情况,空间尺度有10km,时间尺度往往有10分钟,维度上红黄绿,要不要换线。近处看下前面老大爷会不会碰瓷,空间尺度10m,时间尺度100ms,维度上看他动作,要不要避让。这两个行为不一样,但你能感觉到任何一件事消耗的精力差别不大。计算机一样,如果把时空和维度数量算一个三维坐标系,换算栅格的数量往往是一样
LLA、ENU、ECEF坐标系
转自https://www.cnblogs.com/Joetao/articles/12711049.htmlLLA地理坐标系则通过经度(longitude),纬度(latitude)和高度(altitude)来表示地球的位置,也叫经纬高坐标系(LLA坐标系)。ENU站心坐标系也叫做站点坐标系、东-北-天坐标系ENU,英文名称是local Cartesian coordinates coordin
到底了