
写文章




- @miles3223
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
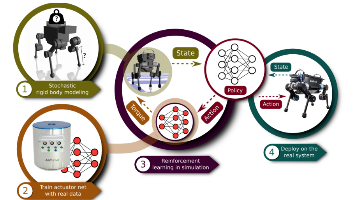
仿真中训练,现实中奔跑:强化学习如何教会机器狗“走路”?
论文摘要本文提出了一种创新的方法,通过在仿真中训练强化学习策略并成功迁移到物理系统,使ANYmal四足机器人掌握了动态、敏捷的运动技能。核心突破在于构建了一个高保真混合仿真器,它结合了精确的刚体动力学模型和一个从真实数据中学习而来的“执行器网络”,后者准确模拟了复杂电机(串联弹性执行器)的真实动态响应。这种方法有效弥合了“仿真-现实”差距。在仿真中,使用信任域策略优化算法训练策略网络,并结合课程学
到底了