




- @mao_hui_fei
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
链接:https://pan.baidu.com/s/1DEUC6Tq1fomwNrKEqnuAXA 密码:nkcu
本文介绍了如何在Ubuntu 22.04环境下快速使用Python解析ROS1的bag消息。由于官方不支持在Ubuntu 22.04上安装ROS1,建议使用预配置的ROS Docker环境。
计算机网络——网络硬件和网络设备及其工作原理常见的网络硬件有网卡、中继站、集线器、桥连接器、交换机、路由器。一. 网卡:网卡是工作在链路层的网络组件,是局域网中连接计算机和传输介质的接口,不仅能实现与局域网传输介质之间的物理连接和电信号匹配,还涉及帧的发送与接收、帧的封装与拆封、介质访问控制、数据的编码与解码以及数据缓存的功能等。简介计算机与外界局域网的连接是通过主机箱内插入一块网络接口...
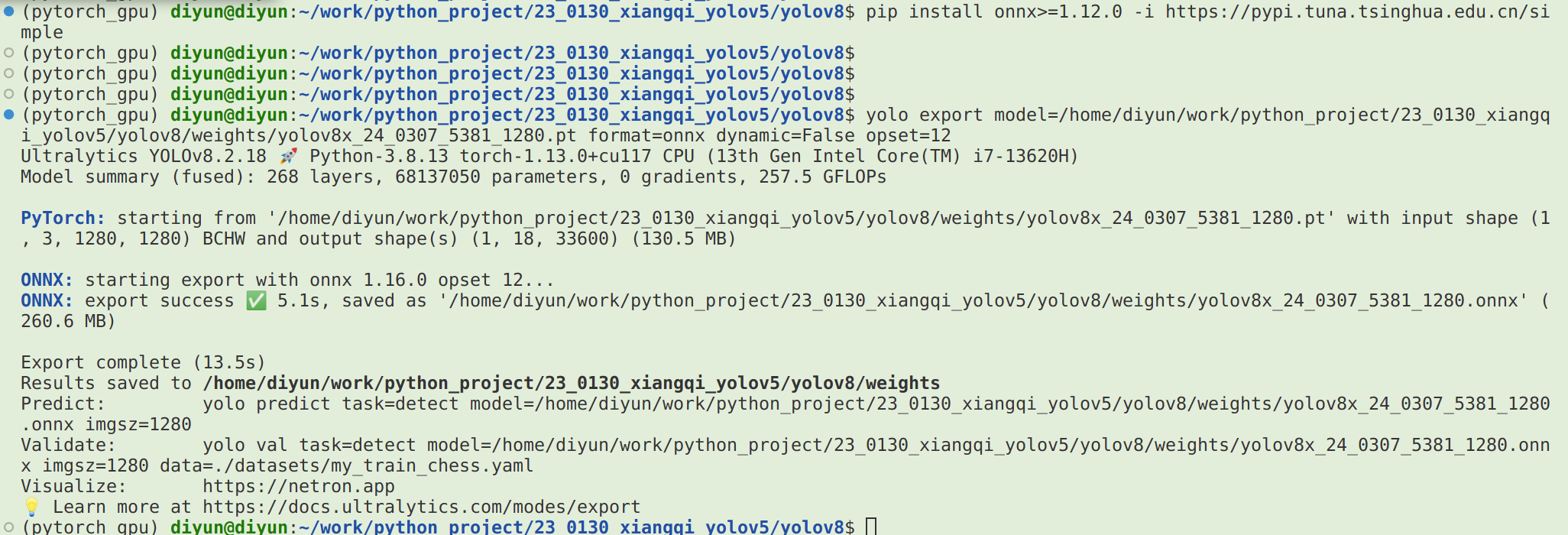
【代码】opencv4+dnn+yolov8识别中国象棋。
扑克牌识别、纸牌识别效果图纸牌识别,纸牌检测语言:python算法:yolo v4效果图:其他详情可见:我的咸鱼
LabelImg是用于制作VOC数据集时,对数据集进行标注的工具。系统:win10软件:anaconda31.安装anaconda3没有安装anaconda3的,可以在下面网站上下载安装包下载网址:https://repo.continuum.io/archive/选择anaconda3且与自己电脑位数一样的Windows版,例如我选择下载的版本为:anaconda 3 默认的是...
https://blog.csdn.net/Black__Jacket/article/details/127736938https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048https://blog.csdn.net/beautifulback/article/details/125717717https://blog.csd

参考:2、下载最新yolov8代码。
pycharm使用pyqt5错误 :Available platform plugins are: xcb, eglfs, linuxfb, minimal, minimalegl, of解决办法开头加入envpath = '/data/xx/xx/venv/lib/python3.6/site-packages/cv2/qt/plugins/platforms'os.environ['QT_QP
python open3d 读取npy格式点云 并保存为pcd格式。