




- @magedhenary
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
docker 安装elasticserch的坑1、max virtual memory areas vm.max_map_count [65530] is too low, increase to at least [262144]在主机中运行:sysctl -w vm.max_map_count=262144 2、Caused by: java.nio.file.Access...
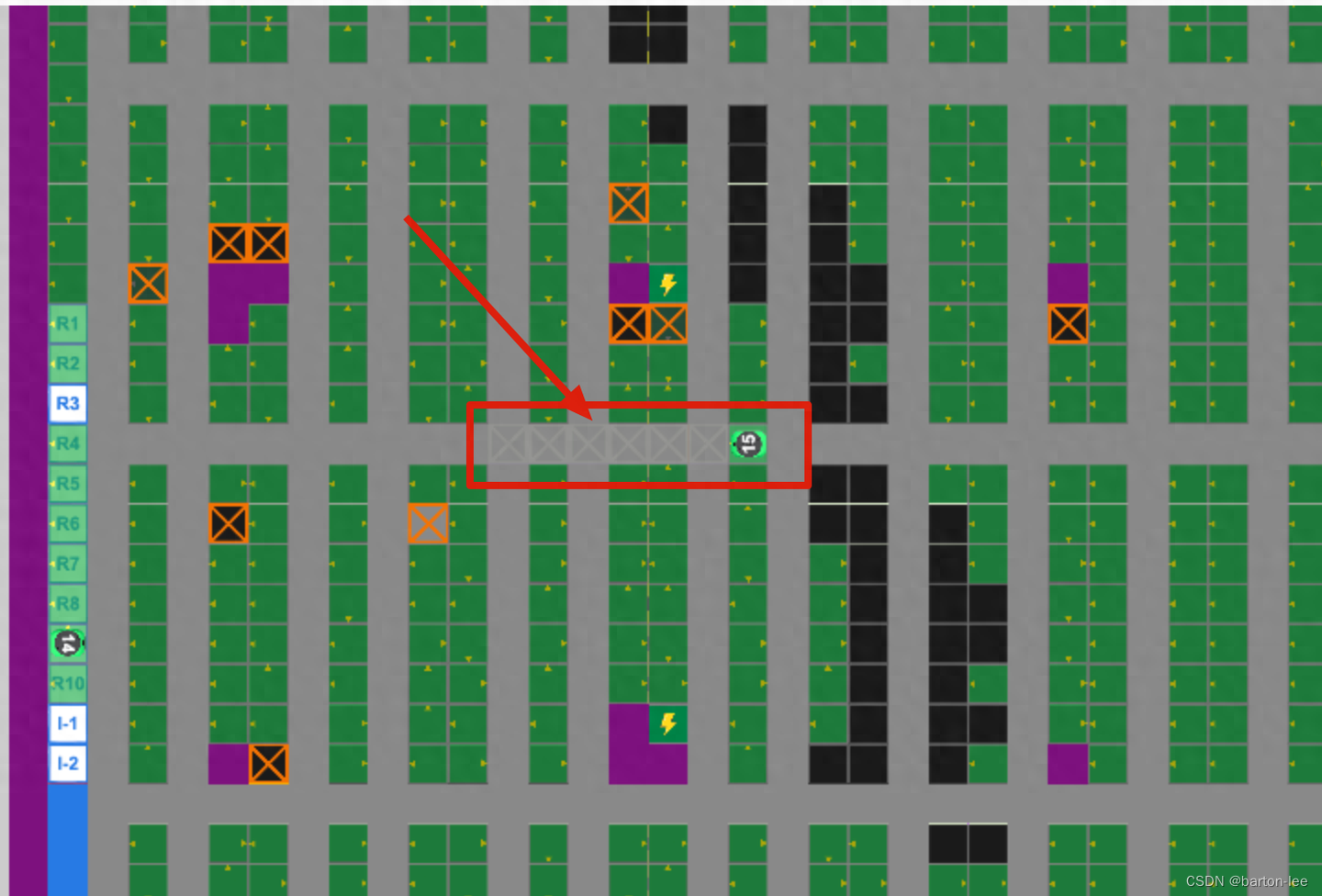
在AGV做业务过程中,常会看到AGV一直停在哪里,没有任何动作。所以显示AGV马上要行进的路线非常有必要。那具体要如何实现呢?有兴趣的可以留言交流。
机器人可以配备各种传感器,如激光雷达、超声波传感器、摄像头等,用于检测周围的障碍物和环境。一旦检测到可能的碰撞,系统可以采取相应的措施,如停止、减速或改变路径。:根据周围环境的情况和机器人的位置,动态调整机器人的速度,以避免碰撞。:设计机器人管理系统时应考虑紧急停止系统,以便在发生意外情况或检测到碰撞风险时立即停止机器人的运动,以保护人员和设备的安全。一些路径规划算法,如A*算法、RRT算法等,在

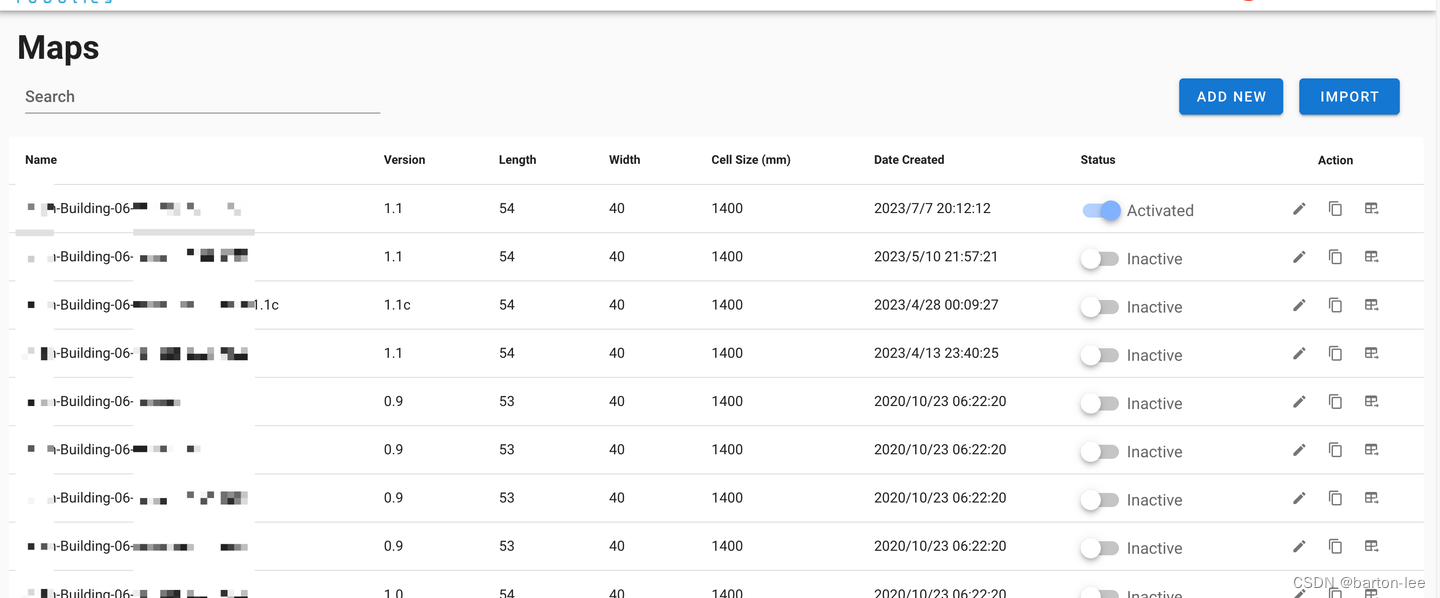
一般每个供应商都有不同的需求,不同的需求都会是在不同的场景下产生的。所有一个动态编辑的地图的能力都软件,是非常有必要的。基于这个想法,我们提供了一个可以实时,动态编辑地图的界面,方便用户可以构建不同的地图场景。同时也方便自己开发过程中构建不同的场景测试,增强软件的稳定性,提高软件的扩展能力等等。保存后,用户可以更具自己的需求,编辑的定制化地图,并应用到生产环境中。第四块区域:选中主区域中的某点,编
如何获取摄像头信息呢?一般人都会想到使用比较流行的RSTP,SMTP或者WebRTC等技术。虽然这些技术比较成熟,使用起来也方便,如果只是一个机器人还好,但是十几上百台机器人的时候,那么将会使内网的数据流量造成非常大的压力,很有可能导致影响正常的业务!虽然减少视频的分辨率,但也是不小的负担。所以我们需要其他的方式来解决这个问题,即http流技术。可参考:使用 multipart/x-mixed-r

机器人可以配备各种传感器,如激光雷达、超声波传感器、摄像头等,用于检测周围的障碍物和环境。一旦检测到可能的碰撞,系统可以采取相应的措施,如停止、减速或改变路径。:根据周围环境的情况和机器人的位置,动态调整机器人的速度,以避免碰撞。:设计机器人管理系统时应考虑紧急停止系统,以便在发生意外情况或检测到碰撞风险时立即停止机器人的运动,以保护人员和设备的安全。一些路径规划算法,如A*算法、RRT算法等,在
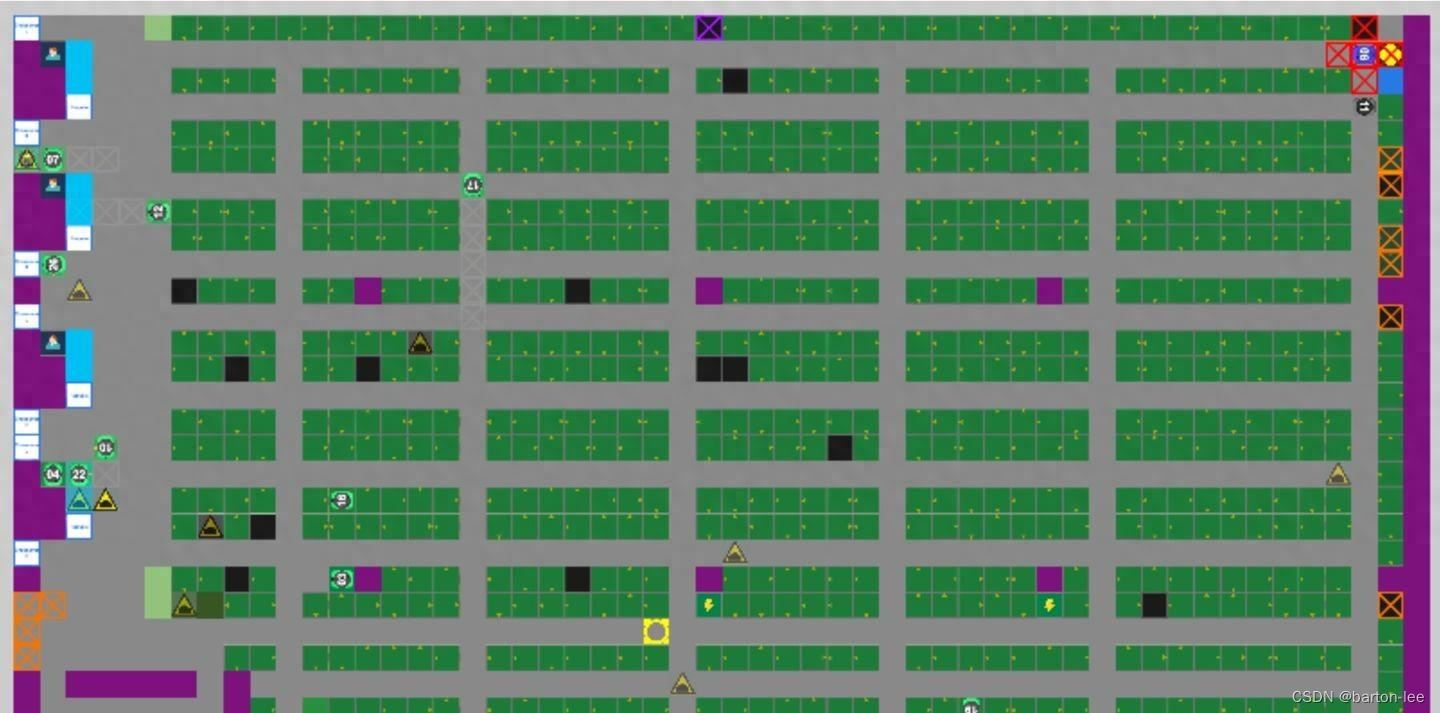
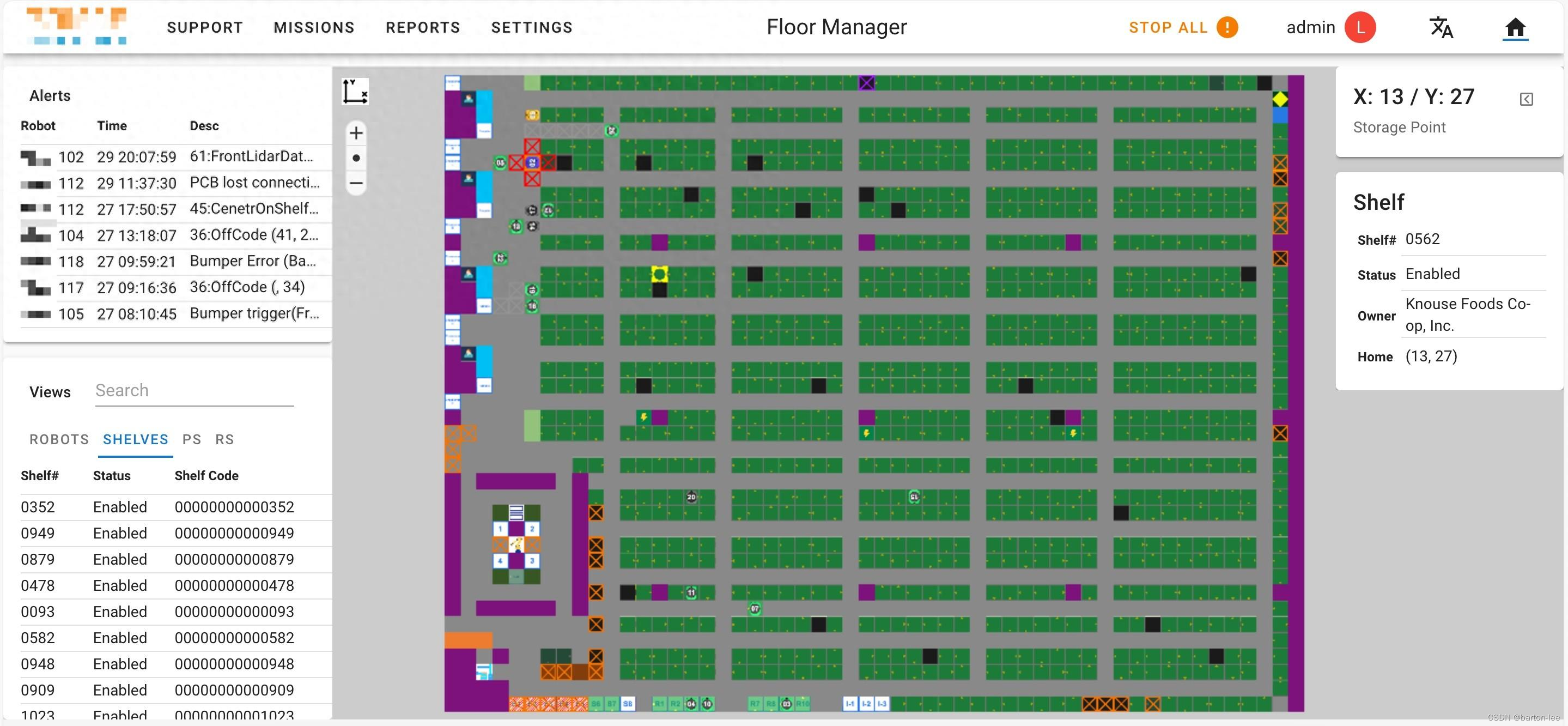
UI主要是展示地图上的所有元素。那么如何定义这么多的元素呢?我们采用的方法是使用不同的图标来展示不同的元素。那具体要如何实现呢?有兴趣的可以留言交流。不同的点都有着不同的功能;
有兴趣的可以留言一起交流下。
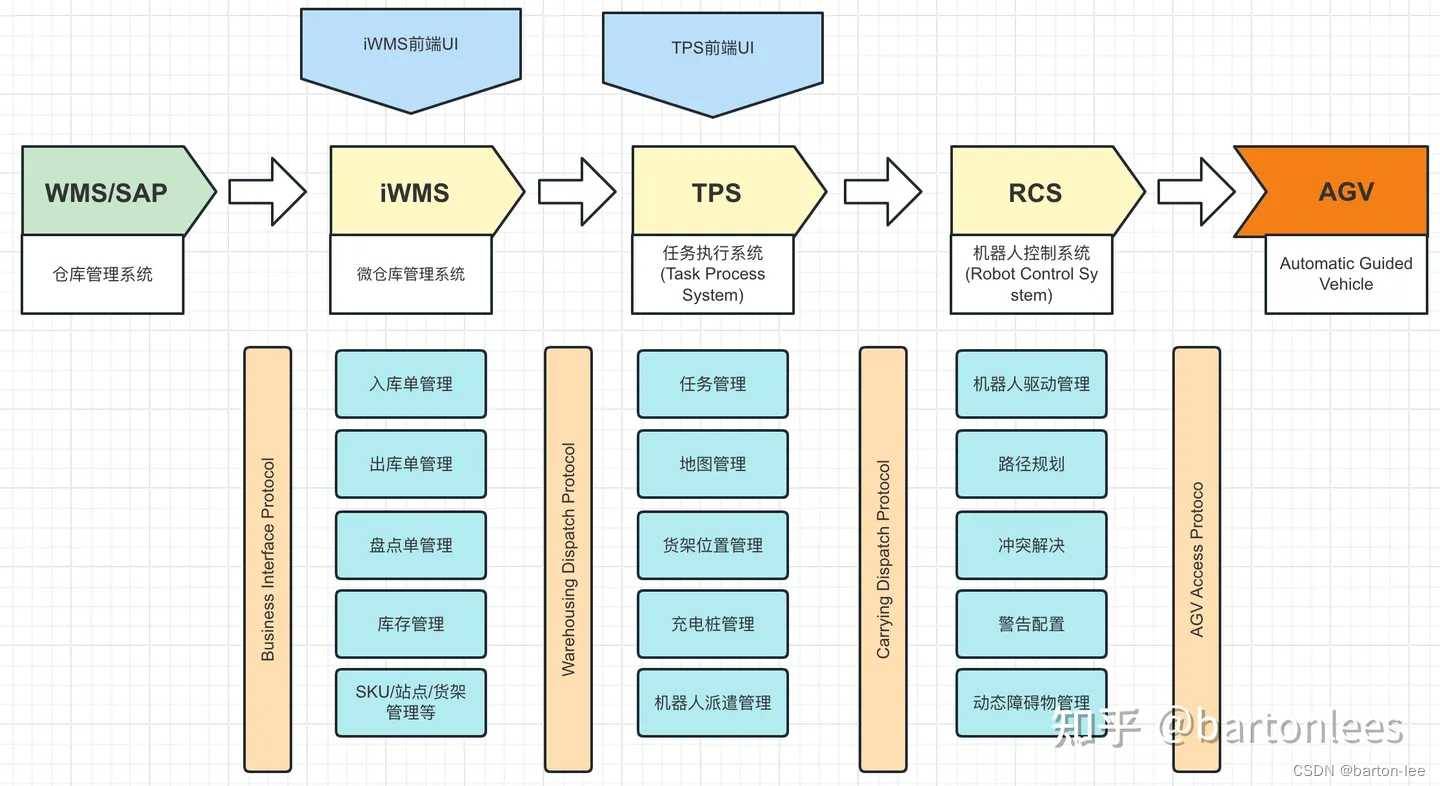
有些人喜欢把WMS系统下面的系统统称为RCS系统。但我不是这么想的,我这里把WMS/ERP系统与AGV之间的系统划分为iWMS系统,TPS系统,RCS系统;这是我在开发RCS系统中的一些个人感悟与心得,写出来与大家一起分享下。是想到什么写到什么,如果有什么不对的,欢迎大家一起探讨。因为每个客户可能使用的WMS都不一样,接口也是各不相同;RCS系统,也有人叫AGV调度系统,主要作用是进行AGV车辆调
有些人喜欢把WMS系统下面的系统统称为RCS系统。但我不是这么想的,我这里把WMS/ERP系统与AGV之间的系统划分为iWMS系统,TPS系统,RCS系统;这是我在开发RCS系统中的一些个人感悟与心得,写出来与大家一起分享下。是想到什么写到什么,如果有什么不对的,欢迎大家一起探讨。因为每个客户可能使用的WMS都不一样,接口也是各不相同;RCS系统,也有人叫AGV调度系统,主要作用是进行AGV车辆调