
写文章




- @m0_74196374
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
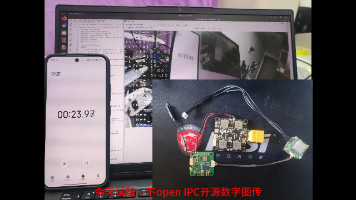
ROS机器人操作系统适配OpenIPC开源数字图传
5. 证明OpenIPC开源数字图传可以用于智能无人机视觉图像输入。1. 使用ElfinRC数字图传 MiniIPC图传。ROS机器人操作系统适配OpenIPC开源数字图传。3. 将图传摄像头数据转为ROS下话题数据。4. 使用ROS工具测试图像延时、清晰度。用作视觉图像输入延时在440毫秒左右。2. 网口连接图传和电脑。
到底了