
写文章




- @m0_62023478
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
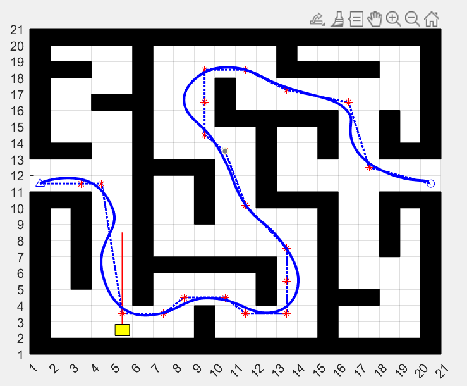
【路径规划】基于改进A星算法和动态窗口法实现多机器人路径规划附matlab代码-(可讲解答疑)
提出了一种改进的A~*算法与动态窗口法相结合的混合算法,以解决移动机器人在多目标复杂环境中的路径规划问题.首要,为了提升算法的运行效率,实现单次规划的路径可通过多个目标点,同时提升路径平滑处理的灵活性并满足移动机器人非完整约束条件,本文利用目标成本函数对所有目标进行优先级判定,进而利用改进的A~*算法规划一条经过多个目标点的最优路径,同时采用自适应圆弧优化算法与加权障碍物步长调节算法,.其次,为实
到底了