- @m0_56498637
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
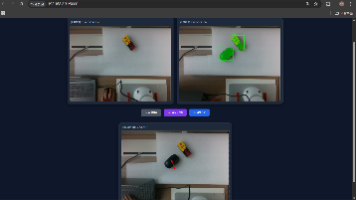
本文分享了语音控制机械臂抓取系统的实现过程。系统采用YOLO进行目标检测,通过Flask接口控制机械臂动作,并整合了两种语音识别方案(Vosk和FunASR)。作者推荐使用FunASR,并加入了大模型Qwen作为智能体来提升交互体验。系统包含相机服务端、机械臂控制端和调度中心,实现了"抓取"、"复位"等语音指令的识别与执行。虽然当前效果有限,但作者表示将持续
本文介绍了一个基于Yolo26-obb模型和语音控制的机械臂抓取方案。方案采用相机服务端框架和机械臂控制系统,通过任务调度中心进行集成管控,并计划使用离线Vosk语音模块。重点介绍了两种数据采集方案:方案一采用固定拍照姿态,方案二通过机械臂点位运动多角度拍摄。提供了完整的Python采集代码示例,包括RealSense相机初始化和机械臂控制功能。文章还展示了项目文件架构,并预告下一步将进行数据标注
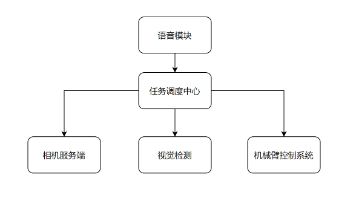
本文分享了语音控制机械臂抓取系统的实现过程。系统采用YOLO进行目标检测,通过Flask接口控制机械臂动作,并整合了两种语音识别方案(Vosk和FunASR)。作者推荐使用FunASR,并加入了大模型Qwen作为智能体来提升交互体验。系统包含相机服务端、机械臂控制端和调度中心,实现了"抓取"、"复位"等语音指令的识别与执行。虽然当前效果有限,但作者表示将持续
本文介绍了使用YOLOv26-OBB模型进行目标检测的完整流程。首先使用CVAT标注工具对训练数据进行标注,将标注结果转换为YOLO格式并按8:2比例划分训练集和验证集。接着配置环境并下载yolo26n-obb.pt模型进行训练,重点关注mAP50和mAP50-95指标。最后提供了图片和视频流测试代码,实现了带方向角度的目标检测功能,包括核心的抓取角度计算函数。整个流程涵盖了数据标注、模型训练和测

本文介绍了基于SAM3模型的视觉处理服务端实现方法。首先提供了SAM3模型文件的下载方式,然后详细讲解了相机服务端的搭建过程,包括Python库导入、SAM3模型预热、全局变量定义、相机配置等内容。重点阐述了SAM3推理过程、点云处理函数和点云处理接口的实现,包括掩码处理、坐标转换、角度计算等关键技术点。最后介绍了相机线程和Flask接口服务的实现,完成了整个相机服务端的开发。该服务端能够通过网页