
写文章




- @m0_46843811
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
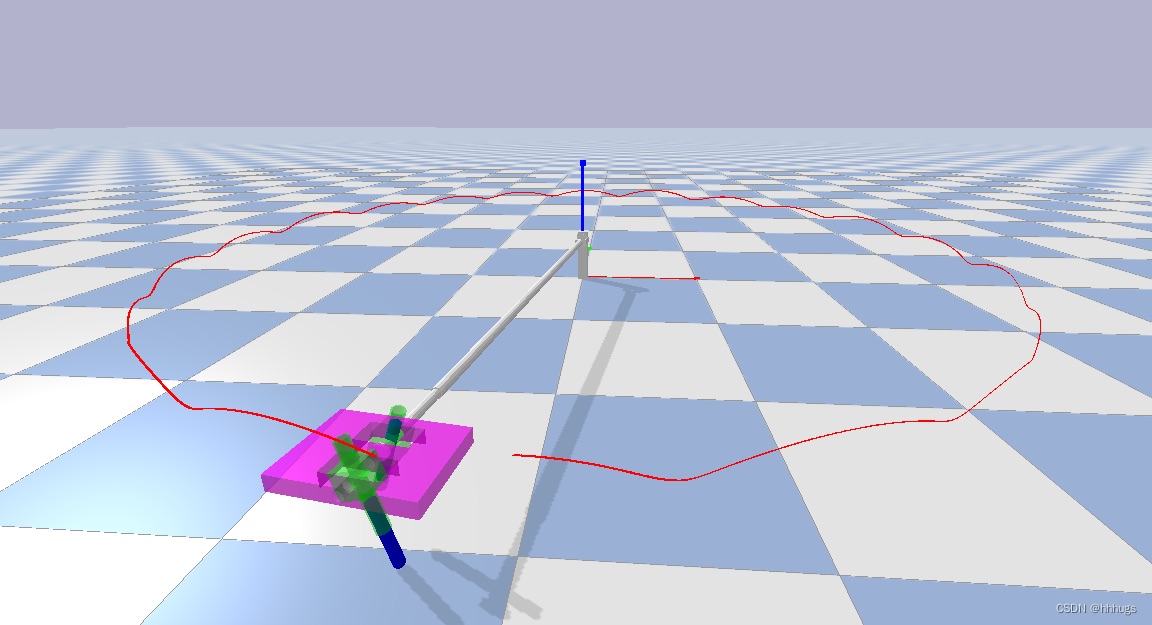
pybullet机器人运动质心轨迹/足端轨迹显示adduserdebugline
pybullet机器人运动质心轨迹/足端轨迹显示getlinkstate和adduserdebugline
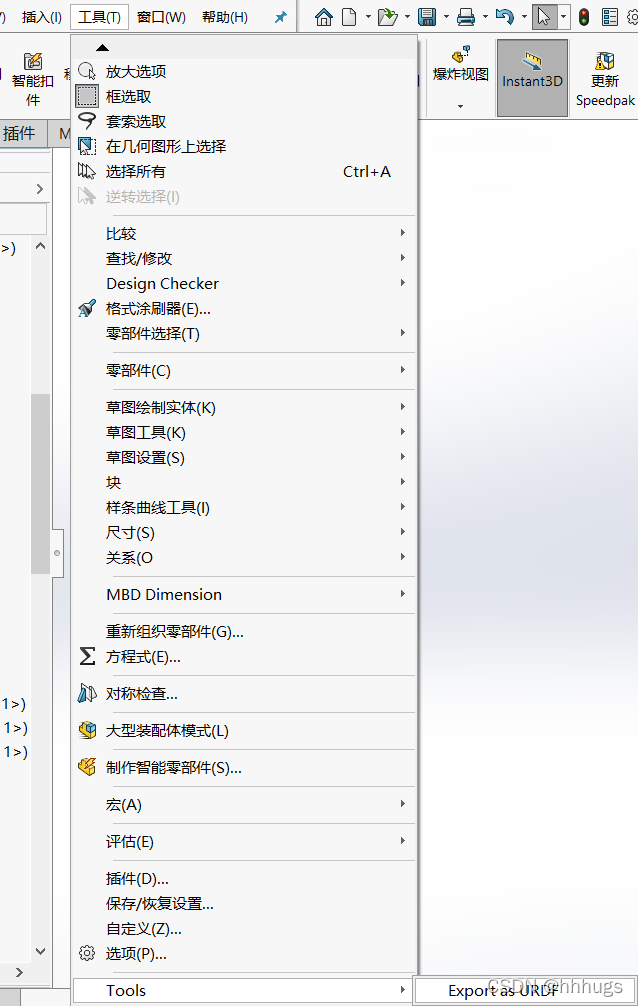
solidworks转urdf文件及遇到的一些问题
一、solidworks的插件下载http://wiki.ros.org/sw_urdf_exporte二、打开:在工具——tools——Export as URDF三、设置关节根据插入的基准轴和坐标系来设置关节,后续关节设置以及部分注意事项可参考【ROS学习】Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学_gpeng832的博客-CSDN博客_solidw
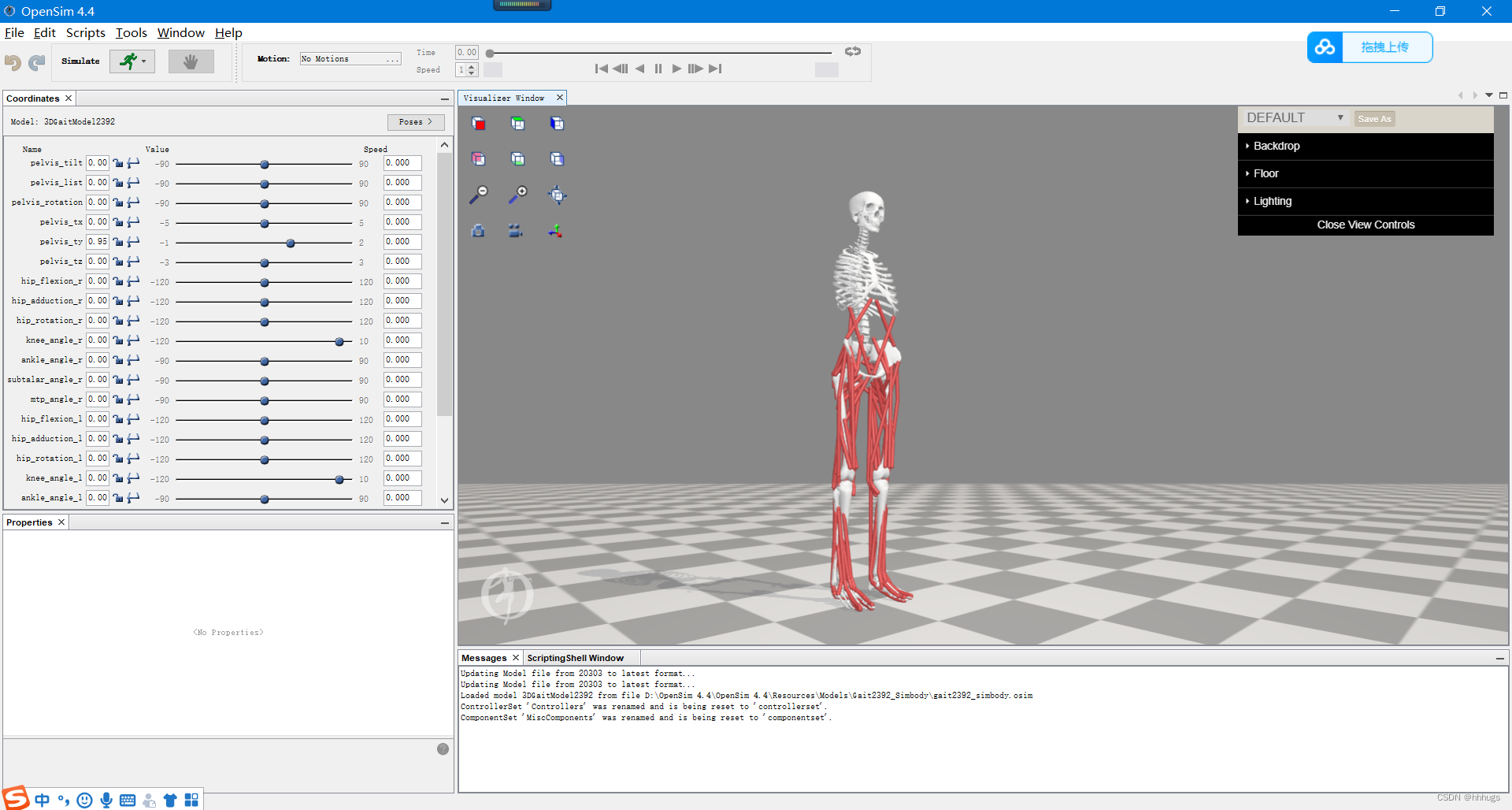
opensim学习笔记1—了解opensim、以及opensim的下载及安装
opensim介绍、以及opensim的下载及安装,中间出现的问题
到底了