
写文章




- @lzx_1007_zyx
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
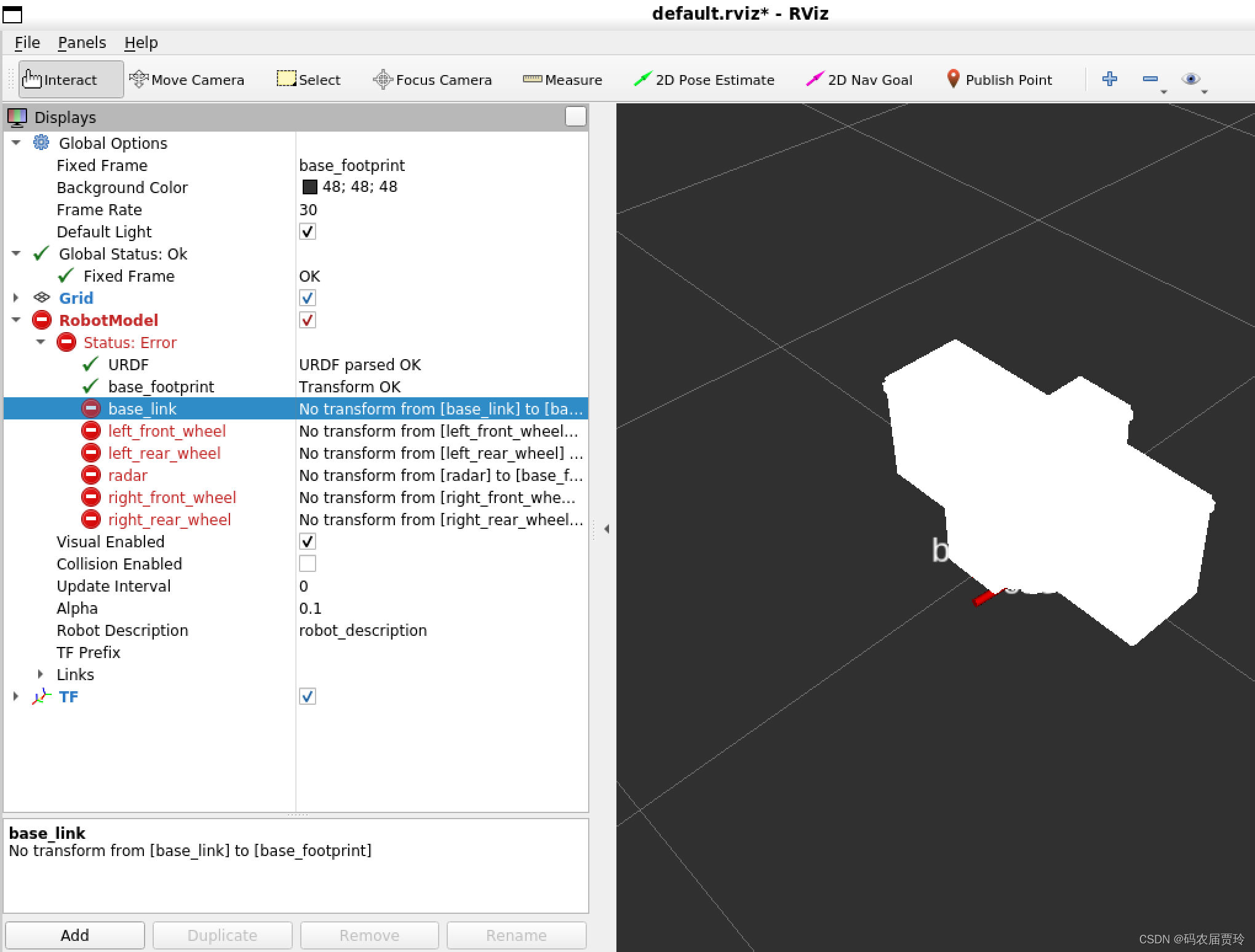
[ROS Unsolved]启动gazebo后,在rviz中添加机器人模型显示No transform from [base_link] to [base_footprint]
直接引入robot_state_publisher和joint_state_publisher_gui这两个节点
到底了
该用户还未填写简介
暂无可提供的服务
直接引入robot_state_publisher和joint_state_publisher_gui这两个节点