




- @jiesunliu3215
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
ROS Windows 人机交互软件开发探索与总结一(开发环境搭建及ROS Win10 Qt功能包的编译运行)正在上传…重新上传取消蒋程扬分类:ROS发布时间 2020.07.27阅读数 7314 评论数 13前言在ROS librviz 人机交互软件开发系列教程中我们实现了Ubuntu端的界面开发。但是很多小伙伴问到能不能在Windows上进行开发,当时回复是不能,主要就是库的依赖问题难解决。但
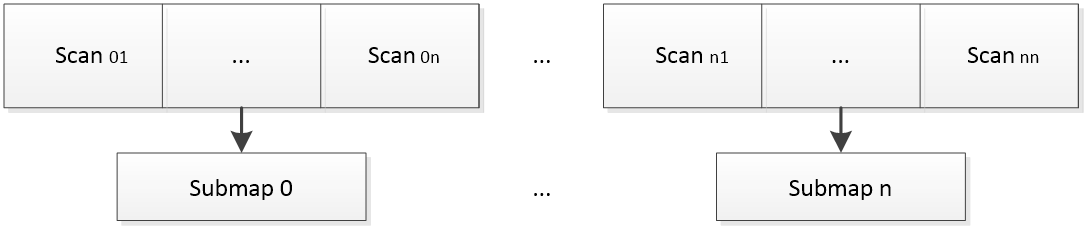
cartographer
1、安装gcc/g++/gdb/make 等基本编程工具$sudo apt-get install build-essential2、安装常见开发工具$sudo apt-get install autoconf automake fakeroot kernel-package linux-headers-[kernel version]-amd643、安装常见开发文档$sudo apt-get i
LQR:线性二次调节器,设计状态反馈控制器的方法。

好的,用户需要我帮忙用C++编写一个使用OSQP库求解的差速模型MPC算法,并且要完整的可运行代码。差速驱动机器人,其运动学模型需要考虑线速度和角速度。MPC(模型预测控制)需要建立预测模型,并在每个控制周期内求解优化问题。首先,运动学模型。差速驱动机器人的运动学方程通常包括位置(x, y)和航向角θ,线速度v和角速度ω。状态方程可能为:dθ/dt = ω接下来是MPC的框架。MPC需要在预测时域

$(function(){})已经是一个匿名函数了,在里面定义的函数已经是私有了,不能全局访问。把函数定义在全局,也就是function外面,这样外部才能调用。Jquery是优秀的Javascrīpt框架。我们现在来讨论下在 Jquery 中两个页面载入后执行的函数。$(document).ready(function(){// 在这里写你的代码...});在DOM加载完成时运行的代码可以简写成j
ROS Windows 人机交互软件开发探索与总结一(开发环境搭建及ROS Win10 Qt功能包的编译运行)正在上传…重新上传取消蒋程扬分类:ROS发布时间 2020.07.27阅读数 7314 评论数 13前言在ROS librviz 人机交互软件开发系列教程中我们实现了Ubuntu端的界面开发。但是很多小伙伴问到能不能在Windows上进行开发,当时回复是不能,主要就是库的依赖问题难解决。但
这个文件是用来存放回收bai站里面的文件的。类似du于Windows会在每个分区内创zhi建一个\RECYCLED 文件夹。。。。它是Ubuntu里面的gnome创建的dao。你要是把它删除了,下次登录Ubuntu的时候还是会被创建。你要是看它不舒服,把它隐藏了就是。。。其中的Trash是指“垃圾” 1000是你的用户的uid1、首先2113鼠标右键选项删除,出现文件夹删不5261掉的情4102况
正常的速度曲线算法有 T 型速度曲线控制、S 型速度曲线控制、正弦加减速控制的算法,每一种算法都各有特点。重新播放。
