写文章
登录
写文章
开直播
登录社区云
登录社区云,与社区用户共同成长
CSDN账号登录
邀请您加入社区
立即加入
欢迎加入社区
@fuyun32
&等风来
关注
2024-03-16 09:04:15 加入 DevPress
抖音号:
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
文章列表
讨论/问答
关注
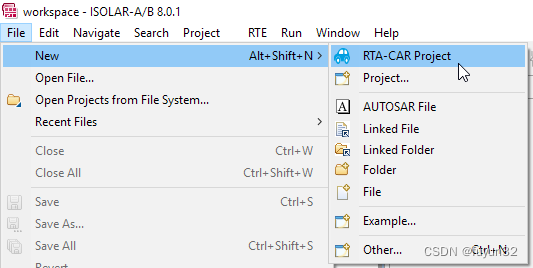
ISOLAR-A/B新建工程
RTA-CAR是ETAS公司开发的用于配置和生成符合AUTOSAR CP的ECU的工具。
#汽车
#软件工程
到底了