




- @easy_R
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
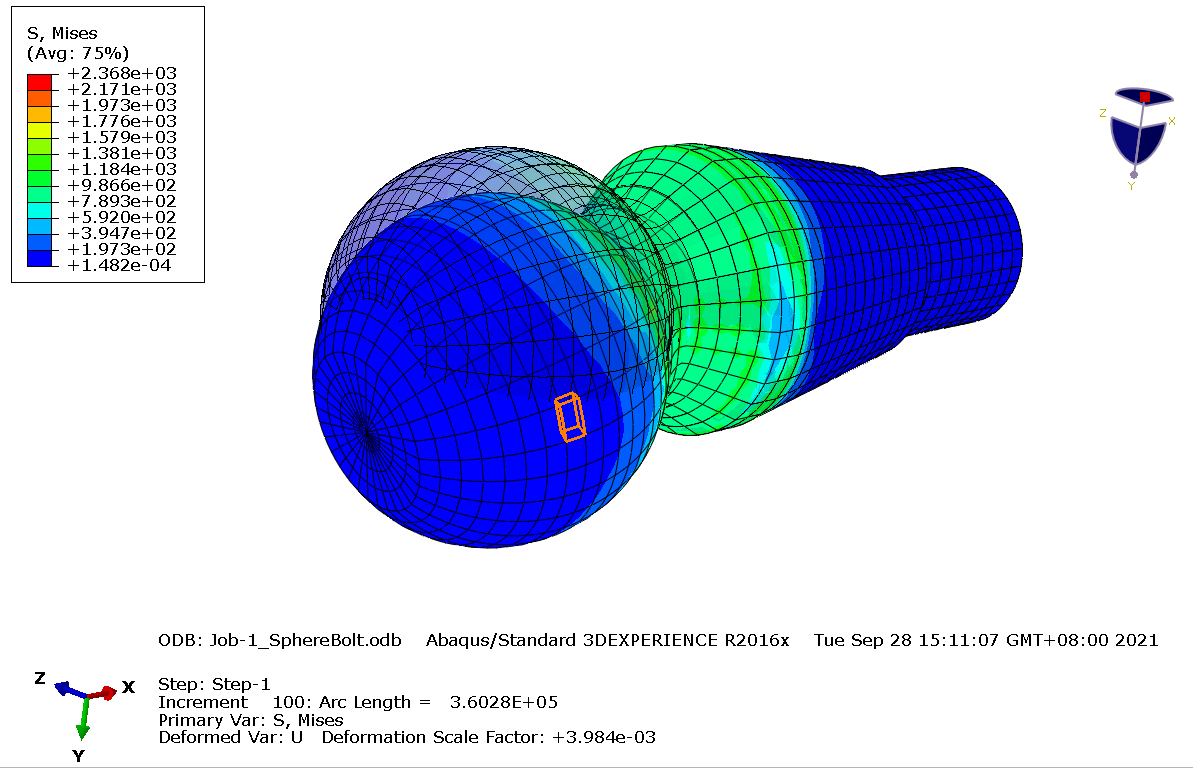
初衷:学习ABAQUS的初衷是为了在工作中分析一下螺栓齿的啮合和金属缩径的过程。初步入手发现是一脸懵逼,我连从哪儿进去怎么开始分析都不知道,后来我找到了宝典,到是真想好好学习一下这一块了,故而在这里记录一下,有些方法免得自己后来忘记。反正公司配的I3 Dell我也没什么脾气,就让他自己先算着,我顺便写一篇软文。球销模型建立要分析球销,我选择在Solidworks中进行建模。当然常规方法,草图旋转就
目前机械臂常用的轨迹曲线主要是S曲线,由于前后两端速度为抛物线形式,整体相对平滑,具有较好的过渡。程序涵盖了混合轨迹,加速轨迹和减速轨迹,通过设置flag和合理的速度加速度输入值获取双S曲线。
运用拉格朗日方程建立二连杆的纯连杆动力学方程,通过推导其过程明白原理。通过优化程序向多连杆动力学过度,方便后期计算n连杆动力学控制做基础。我首先通过笔算整整算了10页纸,和参照书本结果一直。然后进行了逐步计算的matlab化,再然后通过代码优化循环,为后期的多连杆动力学做基础测试。matlab code:%test_for%Two links dyn...
以下是平面四连杆的运动学分析:%%***************planner four links system**********%%function fourlinksclc;clear all;%%%输入结构参数global l1 l2 l3 l4 theta2l1=0.4;l2=0.2;l3=0.4;l4=0.5;w2=50;pi=3.1415926;...
运用拉格朗日方程建立二连杆的纯连杆动力学方程,通过推导其过程明白原理。通过优化程序向多连杆动力学过度,方便后期计算n连杆动力学控制做基础。我首先通过笔算整整算了10页纸,和参照书本结果一直。然后进行了逐步计算的matlab化,再然后通过代码优化循环,为后期的多连杆动力学做基础测试。matlab code:%test_for%Two links dyn...
Crig的机器人学采用的是MDH建模,采用NE方法建立三连杆动力学。Matlab源程序:%Method:MDH%Goal:compute 3R Dynamics%Author:easyR%Date:2019/08/08% theta:du;% dtheta:rad/s;% ddtheta:rad/s^2;clc;clear all;%%tic;t4R=dynamic...