




- @cszn6666
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
第一部分:目标跟踪速览先跟几个SOTA的tracker混个脸熟,大概了解一下目标跟踪这个方向都有些什么。一切要从2013年的那个数据库说起。。如果你问别人近几年有什么比较niubility的跟踪算法,大部分人都会扔给你吴毅老师的论文,OTB50和OTB100(OTB50这里指OTB-2013,OTB100这里指OTB-2015,50和100分别代表视频数量,方便记忆):Wu Y, Lim J, Y
1. iRVision 2.5D 视觉堆垛视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。使用iRVision 2.5D允许机器人只借助一个普通2D相机来拾取码放堆集的目标。2. iRVision 视觉堆垛程序_1 (从寄存器R提取Z轴偏移)此功能通过视觉计算寻找目标的2D位置和指...
如今全球制造业将进入全面智能化时代,德国提出的工业4.0拉开了发达国家全面进入智能制造时代的序幕。如今我国虽然在制造业中处于2.0时代,但凭借着高度发达的互联网,以及全球最大规模的制造业,并在《中国制造2025》纲要指导下,未来智能制造相关产业将得到高速的发展。 机器人领域的技术、产品、应用等展示与交流,将重点展示国内外高端机器人设备、集成系统和应用方案,精彩诠释智能制造,为中国制造开路引...
基于结构光测量技术和3D物体识别技术开发的机器人3D视觉引导系统,可对较大测量深度范围内散乱堆放的零件进行全自由的定位和拾取。相比传统的2D视觉定位方式只能对固定深度零件进行识别且只能获取零件的部分自由度的位置信息,具有更高的应用柔性和更大的检测范围。可为机床上下料、零件分拣、码垛堆叠等工业问题提供有效的自动化解决方案。机器视觉3D引导系统框架3D重建和识别技术 通过自主开...
第一部分:目标跟踪速览先跟几个SOTA的tracker混个脸熟,大概了解一下目标跟踪这个方向都有些什么。一切要从2013年的那个数据库说起。。如果你问别人近几年有什么比较niubility的跟踪算法,大部分人都会扔给你吴毅老师的论文,OTB50和OTB100(OTB50这里指OTB-2013,OTB100这里指OTB-2015,50和100分别代表视频数量,方便记忆):Wu Y, Lim J, Y
随着中国制造业的蓬勃发展,机器视觉行业也在中国市场度过了发展的最初时期,不仅国际知名品牌纷纷在中国开展业务,中国本土的企业也逐渐兴起,如今,人们对于机器视觉的认识更加深刻,对于它的看法也发生了很大的转变。随着机器视觉技术成熟与发展,我们不难发现其应用范围越加的广泛,由起初的电子制造业和半导体生产企业,发展到了包装,汽车,交通和印刷等多个行业。 机器视觉系统提高了生产的自动化程度,让...

近年来,机器视觉技术变得越来越复杂,工业领域的图像处理更多的专注于3D传感器,而且越来越多的技术已经完善并且投入到实际应用中,包括焊缝的检测,以及在生产过程中对未分类部件进行仓拣或精确测量金属板。可以说,机器视觉已经转向了3D。在过去的几年里,点云评估和测量软件也得到了快速地的发展:从单一的图像数据转换成点云数据,对点云数据进行测量,计数和点云匹配。正如图像处理行业的大多数玩家所知道的,获得3D图
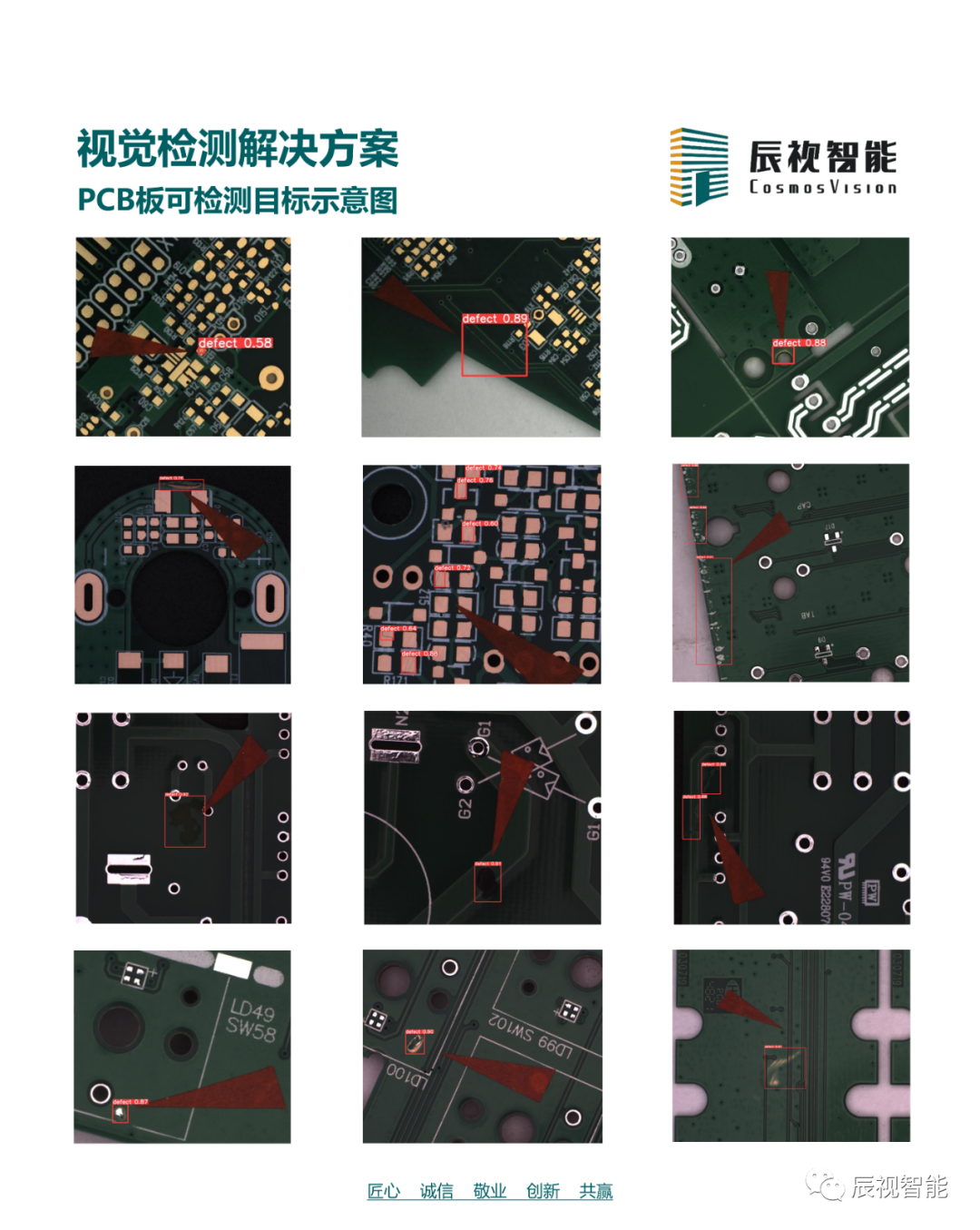
今天带大家了解一下,究竟机器人视觉在PCB板行业中,到底能实现怎样的自动化、无人化、智能化的应用技术。
目前国外汽车公司的白车身焊装线一般都采用自动化和柔性化程度较高的机器人焊装线,主要有电阻点焊接和激光焊接两种焊接方式。激光焊接在焊装生产线上应用的一个非常大的局限性是对车身零件的定位精度有较高的要求,如果偏差过大直接影响到焊接质量,甚至根本无法焊接。而这个难题在国内汽车厂大多难以解决,因为车身是由上百个零件组装而成,最终车身的误差也被多次放大,难以满足激光焊的精度要求。 为解决白车身车顶...