




- @crp997576280
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Claude Code 是由 Anthropic 推出的终端 AI 编程工具,默认使用 Claude 系列模型。使用更便宜的模型(如 DeepSeek)使用更强中文能力模型(如 GLM、Kimi)做多模型调度(Agent)Claude Code 本质是 CLI 工具 → 调用 Anthropic API → 返回结果。它支持自定义 API Endpoint能力是否支持替换 API Key✅替换 A
将DORA中的数据发送到ROS2中,利用RVIZ工具进行可视化。

想必各位做SLAM的小伙伴都会遇到一个不开心的事情就是数据集问题,这个主要是由于国内网络的原因,使得我们在下载有些数据集的时候特别的缓慢,甚至常常出现下载失败的现象,这里我将我自己收集的数据集上传到了百度云盘中分享给大家,希望对大家有所帮助。1、TUM数据集RGB-D 数据集:https://pan.baidu.com/s/1W8tBo_QHpAHNyer10dW0Zg提取码:di9m...
开源自主导航小车MickX41 小车底盘1.1 底盘机械组装1.2 底盘硬件框图2 电气系统搭建本系列教程意在分享自己学习ROS自主导航小车时候的笔记,教程内容包含了从零开始搭建一个四轮的小车模型,小车的名字为 MickX4,教程一共分为4篇:开源自主导航小车MickX4(一)— 小车底盘硬件开源自主导航小车MickX4(二)— 小车底盘软件开源自主导航小车MickX4(三)— 小车ROS节点1
想必各位做SLAM的小伙伴都会遇到一个不开心的事情就是数据集问题,这个主要是由于国内网络的原因,使得我们在下载有些数据集的时候特别的缓慢,甚至常常出现下载失败的现象,这里我将我自己收集的数据集上传到了百度云盘中分享给大家,希望对大家有所帮助。1、TUM数据集RGB-D 数据集:https://pan.baidu.com/s/1W8tBo_QHpAHNyer10dW0Zg提取码:di9m...
将DORA中的数据发送到ROS2中,利用RVIZ工具进行可视化。
新建机器人控制器1、添加相机2、添加激光雷达2.1 2D 激光雷达2.3 3D 激光雷达3、添加GPS4、添加GPS1、添加相机2、添加激光雷达2.1 2D 激光雷达2.3 3D 激光雷达3、添加GPS4、添加GPS如果大家觉得文章对你有所帮助,麻烦大家帮忙点个赞。O(∩_∩)O欢迎大家在评论区交流讨论(cenruping@vip.qq.com)上一篇:Webot机器人仿真平台(...
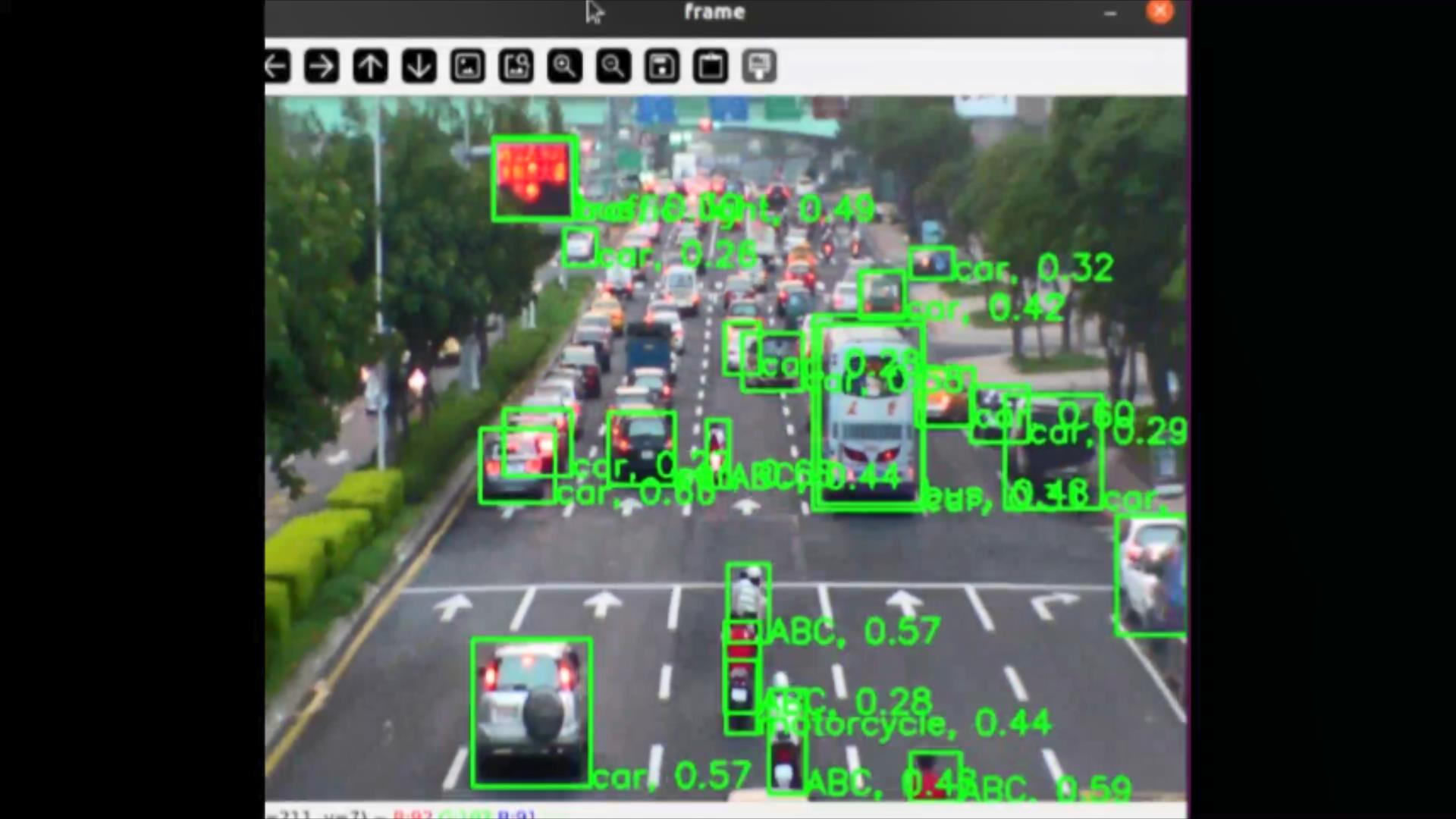
在dora框架下编写一个Python节点读取USB摄像头数据,并调用yolo目标检测API接口函数实现目标检测。
键盘控制小车参考资料参考资料[1] 1https://cyberbotics.com/doc/reference/index?version=R2020a-rev1[2] https://www.cyberbotics.com/doc/reference/motion如果大家觉得文章对你有所帮助,请大家帮忙点个赞。O(∩_∩)O欢迎大家在评论区交流讨论(cenruping@vip.qq....
与ROS通讯Camera 相机IMU 传感器GPS 传感器参考资料参考博客Camera 相机在上一篇博客中创建ros_test.cpp中添加以下代码段并编译:// enable cameraros::ServiceClient set_camera_client;webots_ros::set_int camera_srv;ros::Subscriber sub_camera;set_camera