




- @bell00110100
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
RTOS,Real Time Operating System,实时操作系统,是指具有。FreeRTOS提供了信号量、二值信号量、互斥锁、消息队列等同步机制,以实现。FreeRTOS中,任务的四种状态:运行、挂起、阻塞、就绪。它(RTOS)的首要任务是调动所有资源完成实时控制任务的工作(调度等算法(合作式的调度算法目前已经停止维护)。FreeRTOS是一款。、能支持实时控制系统工作的操作系统。Fr
就是以应用为中心,以计算机技术为基础,软硬件可裁剪,适用于对于体积、可靠性、功耗、性能等方面有严格要求的。嵌入式的英文翻译为Embedded,直译是嵌入之中的,指的就是嵌入式系统。关键点:应用、计算机技术、可裁剪、专用的、计算机系统。,要求嵌入式开发人员对嵌入式知识体系有清晰的认知。
移位寄存器位(SHRB)指令将DATA数值移入移位寄存器。S_BIT指定移位寄存器的最低位。N指定移位寄存器的长度和移位方向(移位加=N,移位减=-N)。SHRB指令移出的每个位被放置在溢出内存位(SM1.1)中。该指令由最低位(S_BIT)和由长度(N)指定的位数定义。
观察时域波形时,要注意设置”Start Address”起始地址和”DSP Data Type”DSP数据类型这两项,否则后续观察到的波形可能会有误。同样,要注意设置”Start Address”起始地址和”DSP Data Type”DSP数据类型这两项,否则后续观察到的波形可能会有误。关闭FIR的工程文件,打开IIR的工程文件,在实验提供的光盘目录”DSP\VC5509\DSP5509_exa

添加头文件的路径:如果工程有引用的头文件,且头文件与main函数所在的.c文件不在同一路径下,需要在"Build Option编译选项"->"Linker"->"Libraries"->"Search Path (-i)"中填写头文件的路径。在项目栏对工程右键,选择"Add Files to Project...",将工程对应的路径下的"led_5509.c"、"sdram_init.c"、"ut
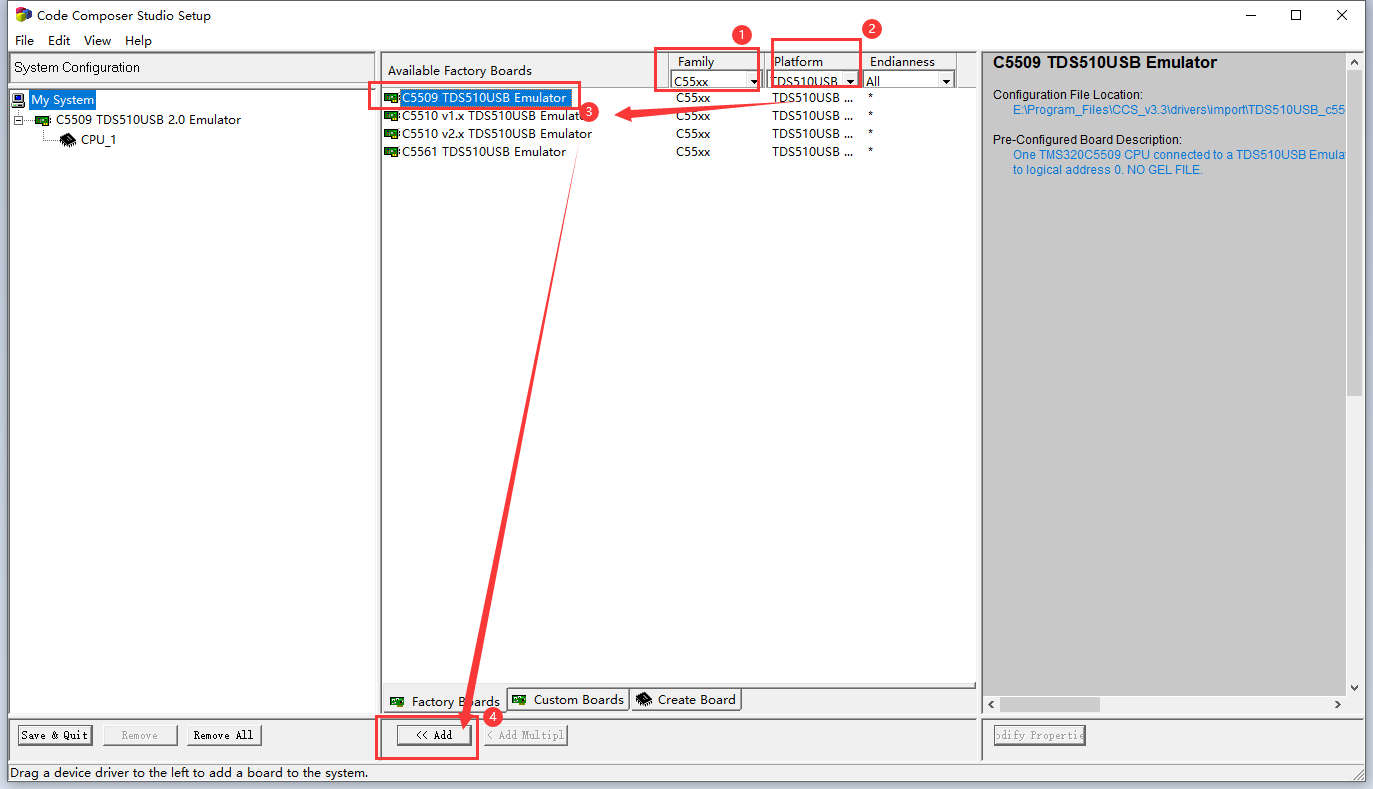
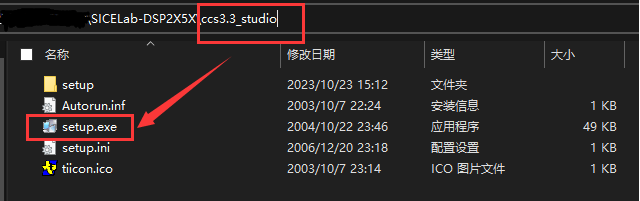
补充:有些CCS的升级补丁实在无法安装,运行软件后毫无反应,只能截取实验指导书的图片。
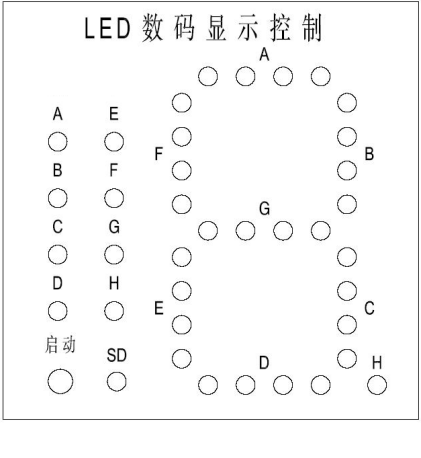
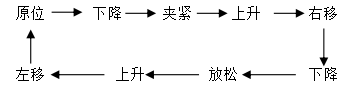
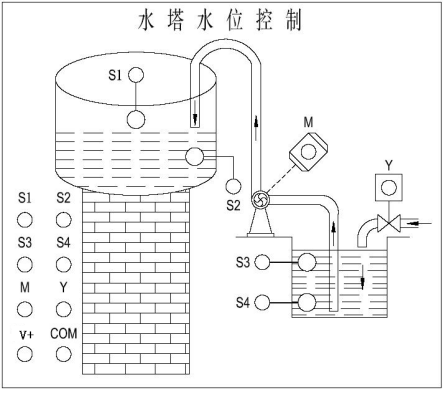
这时再打开SQ2,表示机械手到了上限位,那么YV5会被点亮,表示机械手到了上限位后,开始向左移动,直到SQ4被打开,YV5才熄灭,HL被点亮,表示机械手回到了原位,这样机械手的一轮操作便结束了。再打开SQ2,表示机械手到了上限位,此时YV3指示灯熄灭,之后断开SQ4,表示机械手离开的左限位,同时,YV2保持点亮,YV4指示灯会被点亮,表示机械手正在夹着工件向右移动。之后再断开SQ1,表示机械手离开
当水池水位低于水池低水位界(S4 为 ON 表示),阀 Y 打开进水(Y 为 ON)定时器开始定时,4 秒后,如果 S4 还不为 OFF,那么阀 Y 指示灯闪烁,表示阀 Y 没有进水,出现故障,S3 为 ON后,阀 Y 关闭(Y 为 OFF)。最终,基本实现所有功能,需要注意的是,当S3由开启变为关闭时,Y对应的灯又会亮起(不过这样可以理解为 水池从满--> 变为水池未满,于是Y对应的电机又可以继
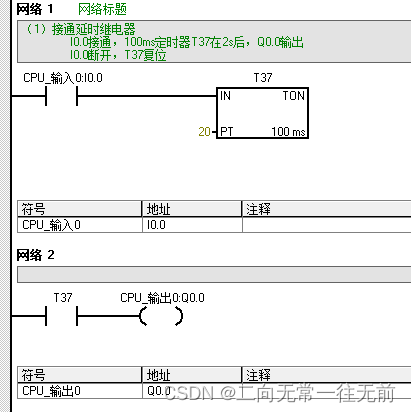
掌握定时器、计数器的正确编程方法,并学会定时器和计数器扩展方法,用编程软件对可编程控制器的运行进行监控。二、 实验说明SIMATIC 定时器可分为接通延时定时器(TON),有记忆的接通延时定时器(TONR)和断开延时定时器(TOF)。SIMATIC 计数器可分为递增计数器(CTU),递减计数器(CTD)和递增/递减计数器(CTUD)。在运行程序之前,首先应该根据梯形图分析各个定时器、计数器的动作状
了解并掌握移位寄存器位SHRB基本应用及编程方法。
