




- @acc98liu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
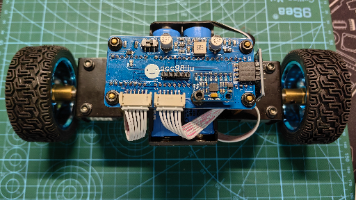
本文介绍了一个基于STM32F103C8T6的两轮平衡车开源项目,采用直流编码电机与MPU6050传感器实现姿态控制。项目详细讲解了硬件设计包括电机驱动模块(TB6612)、编码器测速原理、PCB布线注意事项,以及软件实现中的PID控制算法(含比例、积分、微分三参数调节)和低通滤波处理。系统通过DMP库进行姿态解算,将PWM输出与编码器反馈构成闭环控制。作者提供了完整的原理图、Gerber制板文件
本文介绍了一个基于STM32F103C8T6的两轮平衡车开源项目,采用直流编码电机与MPU6050传感器实现姿态控制。项目详细讲解了硬件设计包括电机驱动模块(TB6612)、编码器测速原理、PCB布线注意事项,以及软件实现中的PID控制算法(含比例、积分、微分三参数调节)和低通滤波处理。系统通过DMP库进行姿态解算,将PWM输出与编码器反馈构成闭环控制。作者提供了完整的原理图、Gerber制板文件
本文介绍了一个基于STM32F103C8T6的两轮平衡车开源项目,采用直流编码电机与MPU6050传感器实现姿态控制。项目详细讲解了硬件设计包括电机驱动模块(TB6612)、编码器测速原理、PCB布线注意事项,以及软件实现中的PID控制算法(含比例、积分、微分三参数调节)和低通滤波处理。系统通过DMP库进行姿态解算,将PWM输出与编码器反馈构成闭环控制。作者提供了完整的原理图、Gerber制板文件
本文介绍了一个基于STM32F103C8T6的两轮平衡车开源项目,采用直流编码电机与MPU6050传感器实现姿态控制。项目详细讲解了硬件设计包括电机驱动模块(TB6612)、编码器测速原理、PCB布线注意事项,以及软件实现中的PID控制算法(含比例、积分、微分三参数调节)和低通滤波处理。系统通过DMP库进行姿态解算,将PWM输出与编码器反馈构成闭环控制。作者提供了完整的原理图、Gerber制板文件