
写文章




- @LJGHZ
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
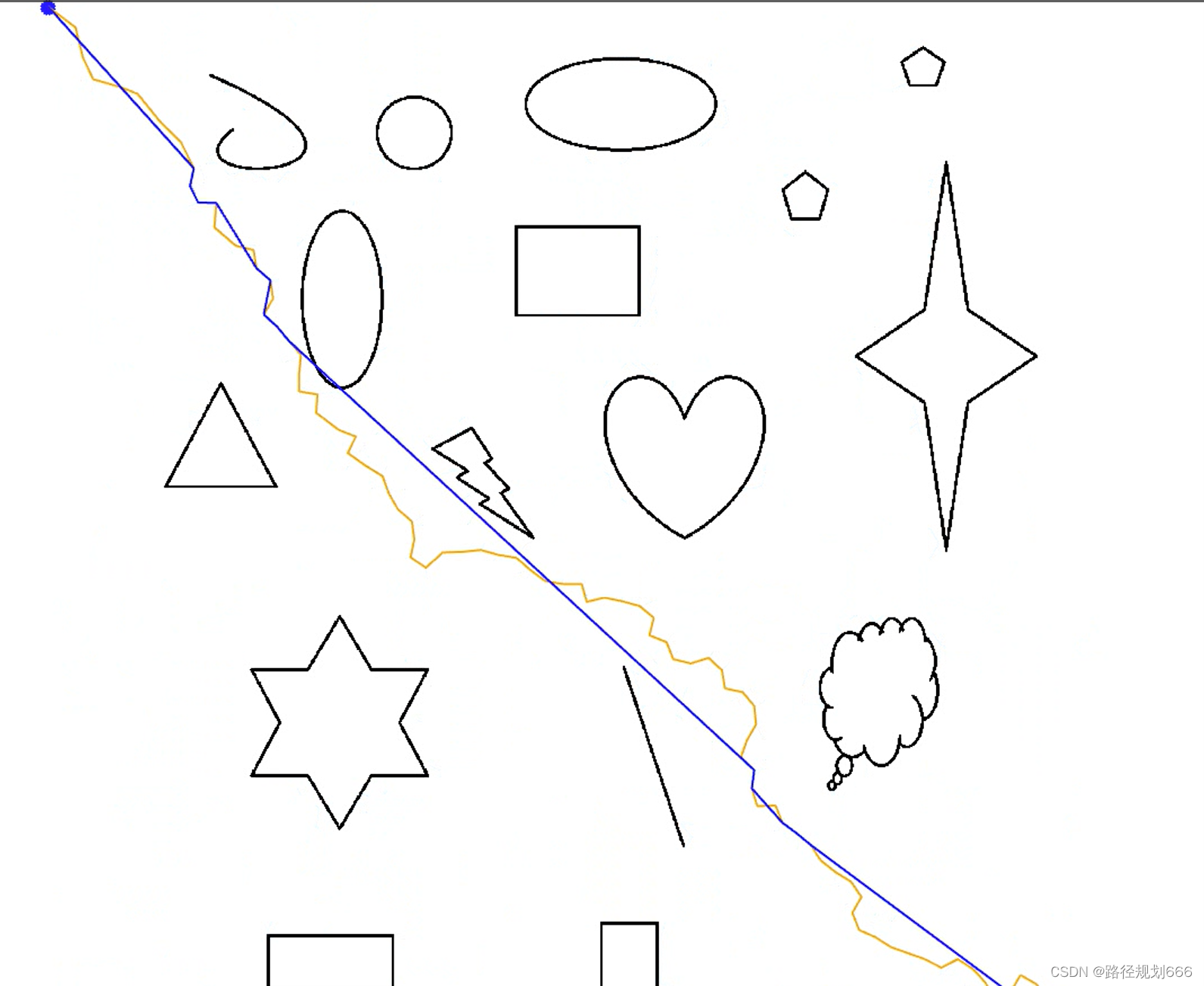
RRT算法优化(3)
RRT算法(Rapidly-exploring Random Tree)是一种用于路径规划的算法,旨在快速生成连续空间中的随机样本,以探索未知环境并找到最佳路径。该算法最初由Steven M. LaValle于1998年提出,被广泛应用于机器人领域、自动驾驶和虚拟现实等领域。RRT算法的核心思想是通过不断扩展树结构来探索搜索空间。算法从起始状态开始,每次随机生成一个点,并找到树中最接近的节点,然后
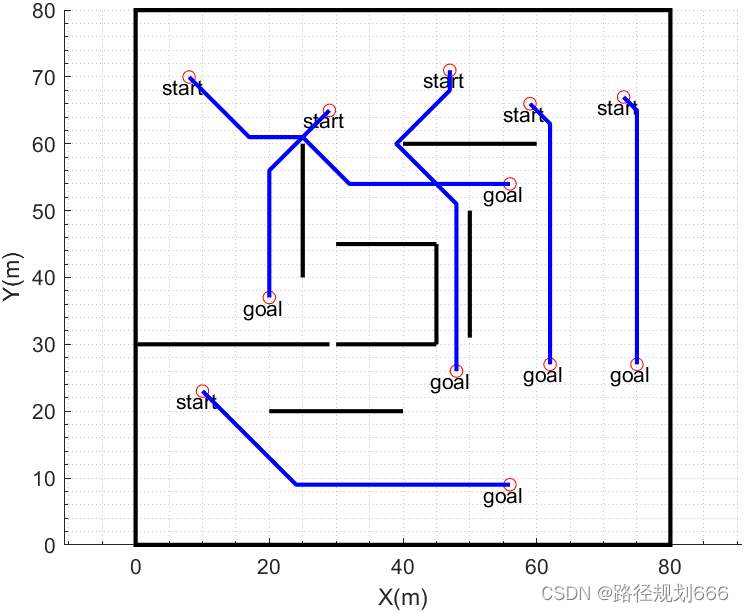
多A*算法路径规划(附MATLAB代码)
A*算法是一种常用的寻路算法,被广泛应用于人工智能和游戏开发中。该算法通过评估每个节点的代价和启发式函数来找到最佳路径。在这篇博文中,我们将深入探讨A*算法的原理。A*算法的核心思想是在搜索过程中综合考虑两个因素:已经花费的代价和还需要花费的代价。具体而言,A*算法通过计算每个节点的综合评估函数f(n)来确定下一个最优的节点进行探索。其中,f(n)的计算方式为:f(n) = g(n) + h(n)
到底了