
写文章




- @BBeymax
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
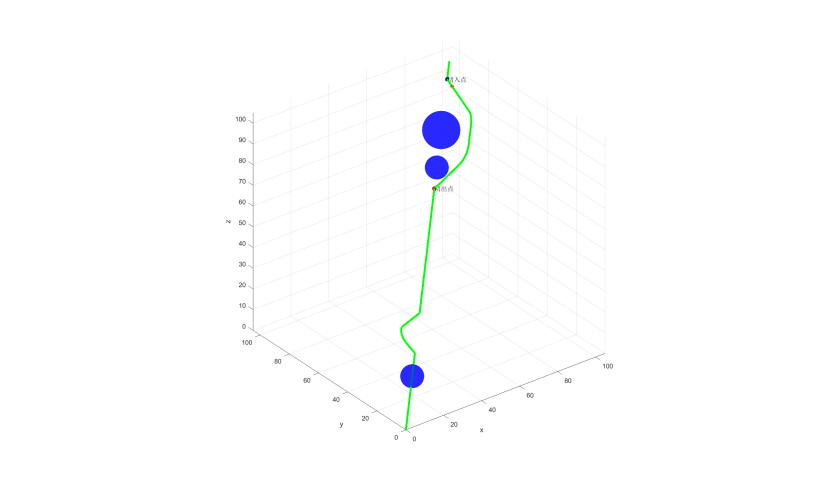
路径规划之实现全局路径(改进的RRT算法)加局部重规划(DWA)进行实时避障
本文介绍了如何通过结合改进的RRT算法和DWA算法实现全局路径规划和局部实时避障。首先,使用改进的RRT算法生成全局路径,然后通过DWA算法在感知到障碍物时进行局部重规划。具体步骤包括:1)以DWA算法为主体,生成全局参考路径;2)设定机器人的感知范围,当检测到障碍物时,计算切入点和切出点,以避开障碍物并重新回到全局路径。文章还提供了Matlab代码示例,展示了如何实现这一过程,并通过运行结果图展
到底了