- @2508_94204880
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
今天咱们来搞点有意思的——用YOLOv5做个能实时抓作弊行为的系统,重点在于手部异常动作识别。毕竟在AI眼里,作弊行为和偷吃小鱼干的动作模式,可能也没差多少嘛。重点是这个VideoThread,继承自QThread,负责在后台跑YOLOv5的检测逻辑,避免界面卡死。YOLOv5的源码直接去官方仓库拖下来,注意别用最新版,v6.0之后的版本对自定义数据不太友好,建议用v5.0分支。基于YOLOv5的
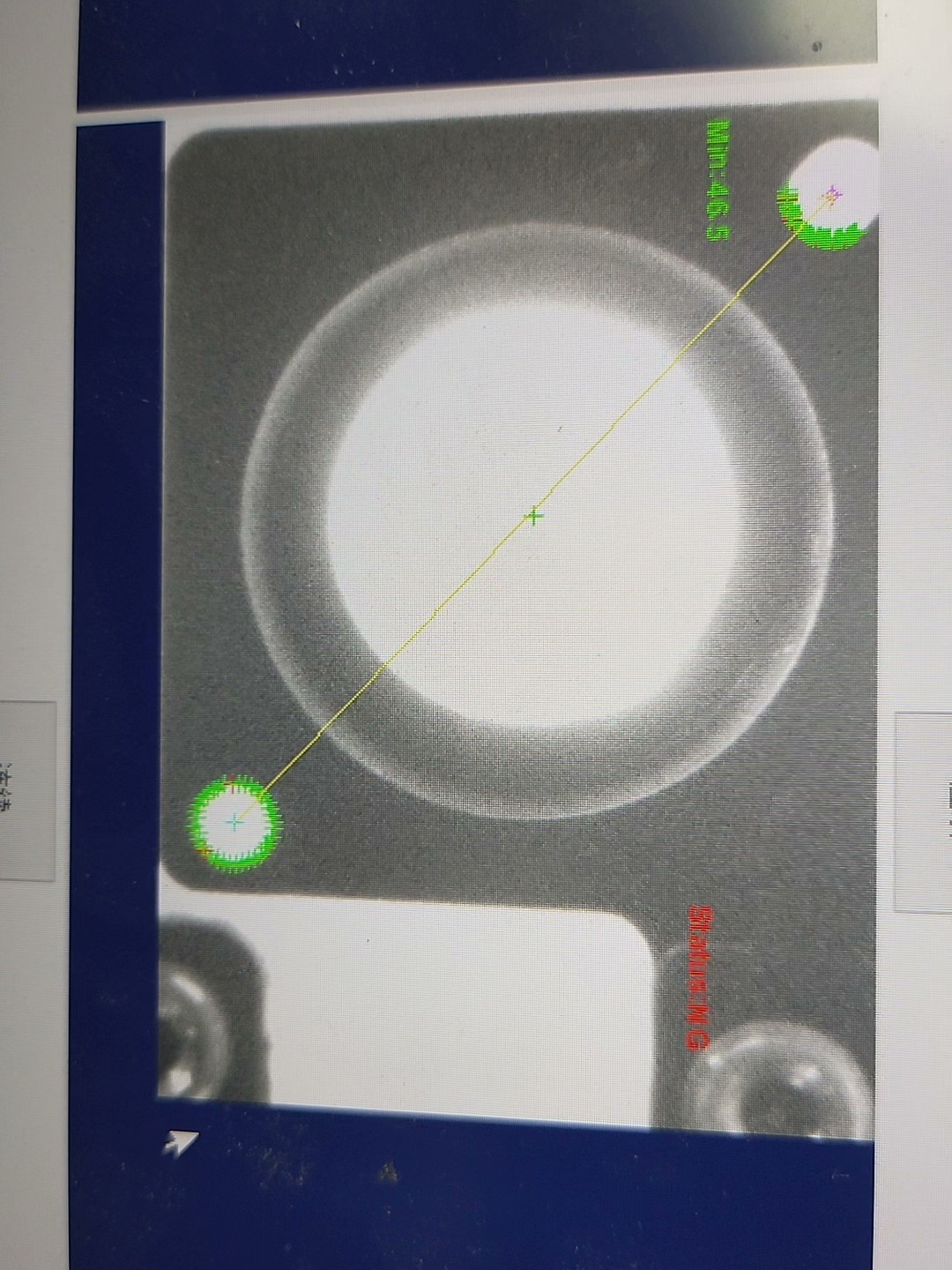
通过这次C#与VisionPro联合编程实现6通道相机独立检测的多线程项目,我学到了很多东西。多线程的合理运用大大提高了程序的处理效率,让我们能够同时处理多个相机的数据。而VisionPro的集成则为图像检测提供了强大的功能和丰富的工具。希望这篇分享能对大家在类似项目中有所帮助,一起在视觉工程的世界里探索更多好玩的东西!
整套代码已经在GitHub开源(假装这里有链接),包含HLS源码、Vivado工程和Python驱动,拿回去就能直接烧录到PYNQ板子上开玩。想在FPGA上跑YOLO?最后说点实在的,这个方案最大的价值不是性能多炸裂,而是展示了如何用Python+FPGA的混合开发模式快速验证算法。整套方案支持HDMI实时显示,插个USB摄像头就能用,下面咱们拆开看看怎么实现的。实测在100MHz时钟下,单个卷积
重点是这个结构足够灵活,想加新报文直接往里塞就行,跟搭积木似的简单。关键是把对方设备的协议格式吃透,剩下的就是字符串拼接的体力活了。该程序可用于西门子1200plc与任何设备自由口通讯,程序可作为模板,只需要轻松的修改增减报文即可使用。本程序为1200为主站,首先发送报文,从站(串口助手)接收报文,随即反馈发送给plc报文。PTP这对好基友配合默契,注意发送完成后要立即激活接收,就像发完快递得盯着

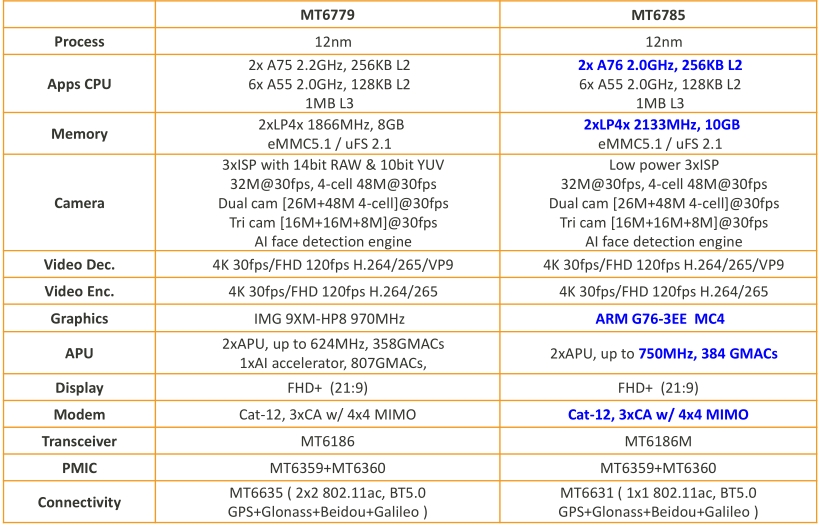
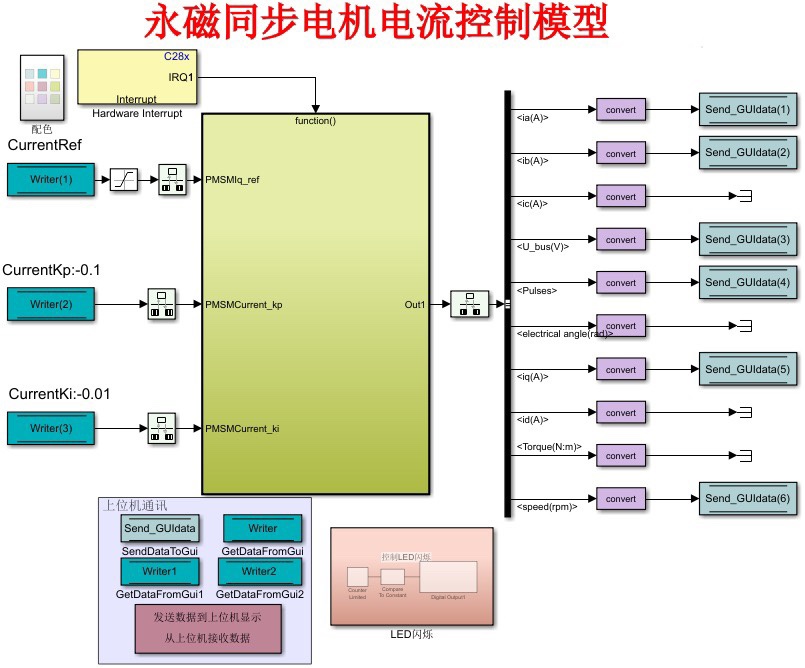
把模型里的观测端口勾选上,生成的代码会保留变量观测功能。自动生成代码这招确实省事,但生成的代码得能跑在28335上才行。模型里那几个标着PI控制器的黄框框,生成代码时会变成实实在在的PID调节算法。主控芯片dsp tms320f28335,基于Matlab Simulink开发的嵌入式模型,模型可自动生成ccs工程代码,生成的代码可直接运行在主控芯片中。这段代码控制着PWM波形的生死,要是算错了数
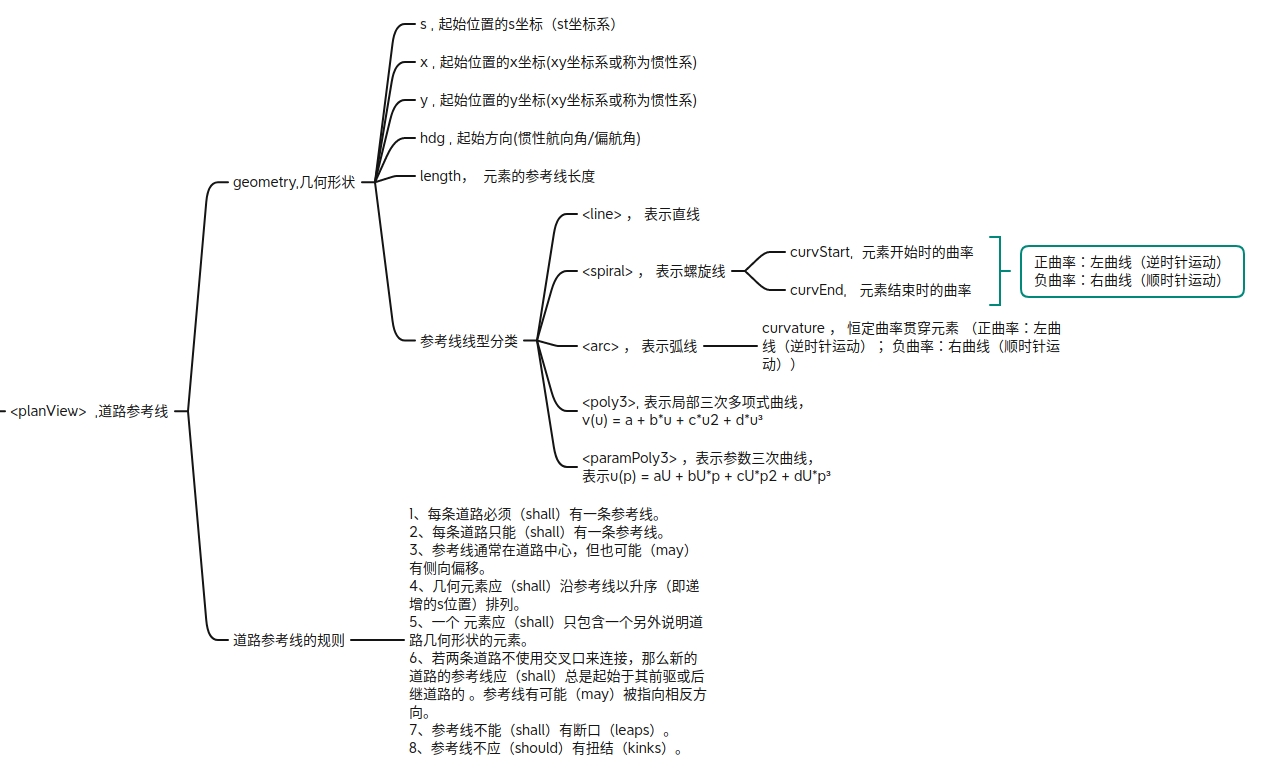
opendrive数据格式解析思维导图 , opendrive高精地图是自动驾驶领域使用最为广泛的开源高精地图标准级地图格式。本思维导图将详细剖开高精路网地图内部的数据格式,涵盖:道路、车道、车道段、交叉口等相关名词及其属性、作用、链接关系等参数的解析。内容比较全面,希望对高精地图进行初步了解的朋友可以选择。如果想更深入涉及到源码级了解的朋友请关注我们发布另一个内容“opendrive高精地图解析
记住,用句柄操作就像外科手术,精准但容易见血,做好异常处理才是老司机。实际跑起来要注意,某些软件用自定义控件类名,这时候就得祭出Spy++这类工具扒代码。有次调某国产烧录软件,发现类名居然是"#32770",差点以为键盘进水了。这套玩法最大的彩蛋是能绕过某些软件的操作限制。某次用PostMessageA偷偷给灰色不可用按钮发送BM_CLICK消息,直接把厂商的试用版搞成全功能模式,吓得赶紧删代码—
在TIA Portal里给机械臂配个固定设备名,比如直接写成"KR6_R900",记得勾选"自动生成PROFINET设备名称"的复选框。项目文件里那个"自动找原点"的FB块挺有意思,利用伺服的实际位置反馈和接近开关做三级校准。后来改了HMI的脚本,让报警信息自动转存到PLC的DB块里,配合SD卡扩展存储,现在能保存三个月的历史数据。36路模拟量处理最怕信号干扰,特别是那12路压力检测用的4-20m

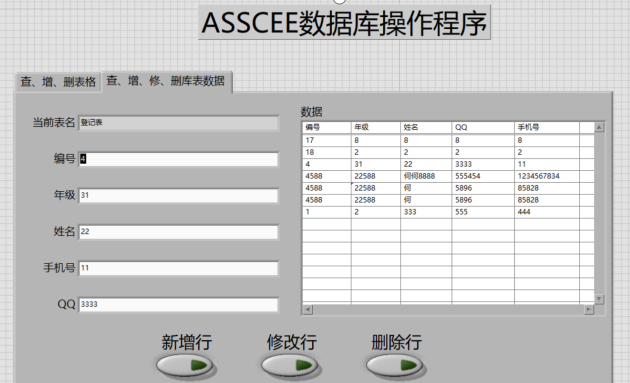
要是连接失败,系统会自动抛出带错误码的异常,调试的时候记得抓这个。NI LAVIEW 2018 连接ASSCEE数据库,可完成实时表格查询,表格增加,表格删除,实时表内查询,表内新增行,表内修改行,表内删除行等等功能,所有文件为源代码,未设密码,并附有教程,可以自主扩充。返回的results是个二维数组,第一行是列名,后面跟着数据行。源码用的.NET 4.6框架,改成.NET Core 3.1也完
建议布局时在这块预留散热孔,我试过用0.3mm孔径+45度斜排的过孔矩阵,配合2oz铜厚,满负荷温度直降7℃。先看硬件参考设计包里的PCB布局,六层板走线明显为AI加速模块做了特殊处理。我上次自己画板子的时候,时钟线没做包地处理导致AI推理时偶发花屏,后来照着参考设计加了屏蔽才解决。总的来说,G90这套开放方案虽然有些小坑,但对于想深度定制AI硬件的团队来说,绝对是性价比之选。建议调试时用J-Li