
写文章




- @2403_88733025
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ROS学习——通过C++&Python实现机器人运动控制
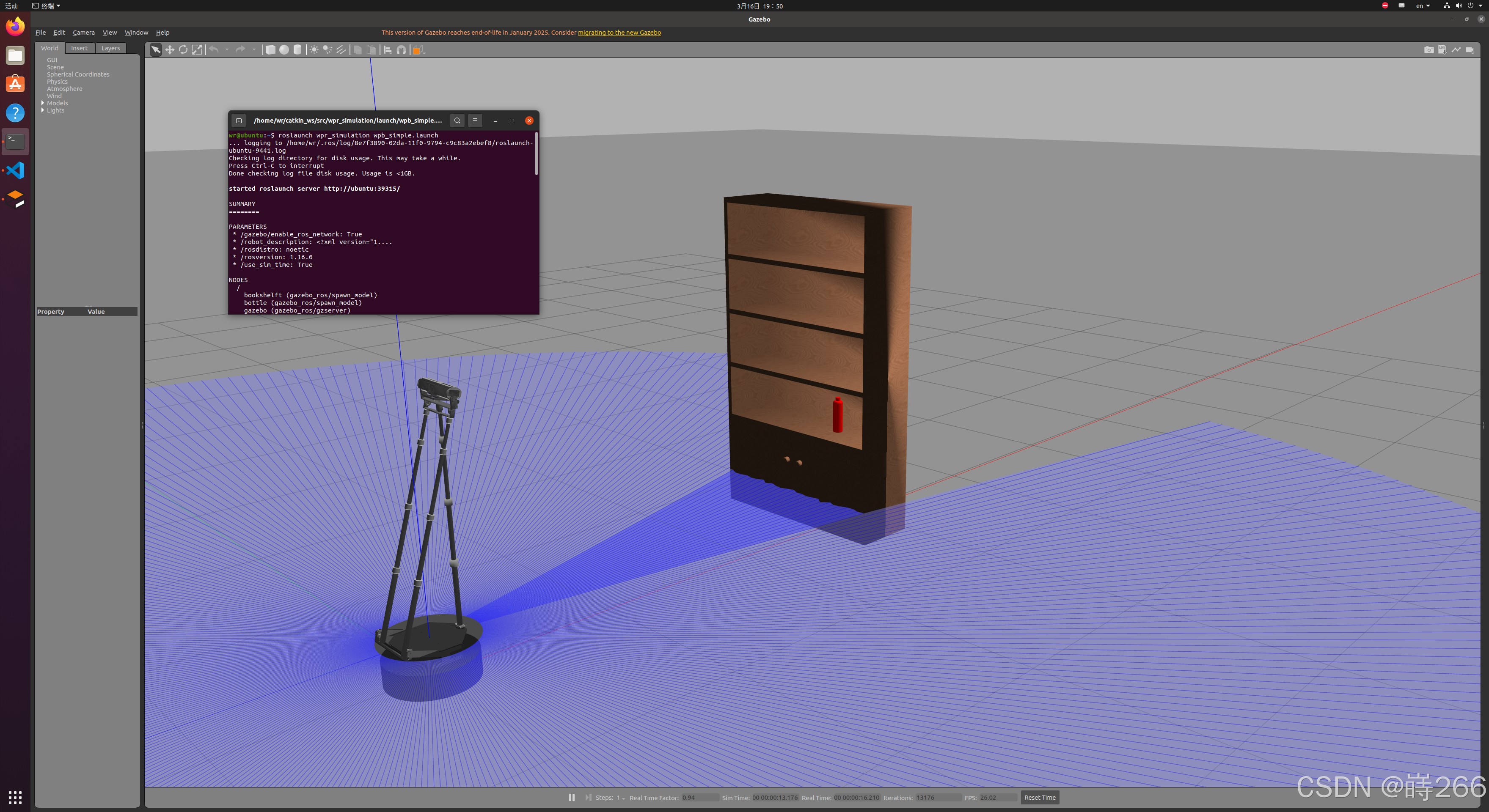
在工作空间中的src目录下,打开终端输入。,创建一个名为vel_pkg的软件包。如果出现以下现象,代表节点编写成功。ROS机器人运动仿真。
ROS学习——RViz简介与基础使用方式
位于界面左上角第一栏,包含常用菜单项。

到底了
该用户还未填写简介
暂无可提供的服务
在工作空间中的src目录下,打开终端输入。,创建一个名为vel_pkg的软件包。如果出现以下现象,代表节点编写成功。ROS机器人运动仿真。
位于界面左上角第一栏,包含常用菜单项。