
写文章




- @2401_88185612
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
手把手教你实现PX4飞控与上位机(Jetson,树莓派)的串口通信连接(Ubuntu18/20/22通用)
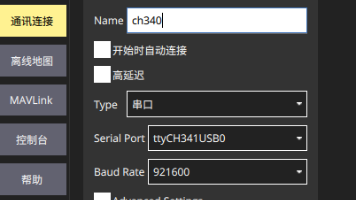
本文详细介绍了Pixhawk 2.4.8飞控与CH340/CH341串口模块的接线与通信配置方法。主要内容包括:Pixhawk的TELEM2接口接线原则(交叉连接TXD/RX、RXD/TX,共地连接);CH340驱动安装步骤(下载、编译、安装及验证);3)QGroundControl地面站配置(参数设置、波特率匹配及串口连接)。通过交叉连接串口、正确安装驱动并配置一致的波特率,可实现Pixhawk
到底了